一种双侧水平旋转刀闸的角度测量及故障分析方法与流程
本发明涉及刀闸检测,尤其涉及一种双侧水平旋转刀闸的角度测量及故障分析方法。
背景技术:
1、在变电站刀闸状态自动分析中,用户往往希望看到准确的刀闸旋转角度信息。根据刀闸角度信息的获取方法分类,现有的方案大致可以分为四种:第一种方案仅检测刀闸开合状态,例如利用微动开关检测刀闸状态、用深度目标检测技术对刀闸状态进行直接分类,这类方案无法得到刀闸的旋转角度信息;第二种方案利用激光、红外线、位姿等传感器,直接测量刀闸的旋转角度,但要实时观看刀闸状态,仍需另外安装一套可见光相机;第三种方案,采用可见光摄像机,利用sift角点、运动跟踪、直线检测、深度关键点检测等图像处理技术得到刀闸臂的图像夹角,sift角点检测法,在背景中电线杆与电线较多的情况下,存在很多干扰角点,容易导致分析失效。运动目标跟踪法仅适用于分析动态场景,对于静态场景,仍需要采用静态分析方法,与实际刀闸旋转角度存在很大误差;第四种方案是利用复杂的摄像机与刀闸之间坐标系变换,需要预先测量每个刀闸的几何参数、摄像机的位置与成像参数,部署不方便。上述的检测方案存在直线检测不准的问题,导致刀闸角度与状态检测出错。
技术实现思路
1、本发明的目的在于提供一种双侧水平旋转刀闸的角度测量及故障分析方法,旨在解决现有技术中的在检测刀闸的过程中,存在直线检测不准的问题,导致刀闸角度与状态检测出错的技术问题。
2、为实现上述目的,本发明采用的一种双侧水平旋转刀闸的角度测量及故障分析方法,包括如下步骤:
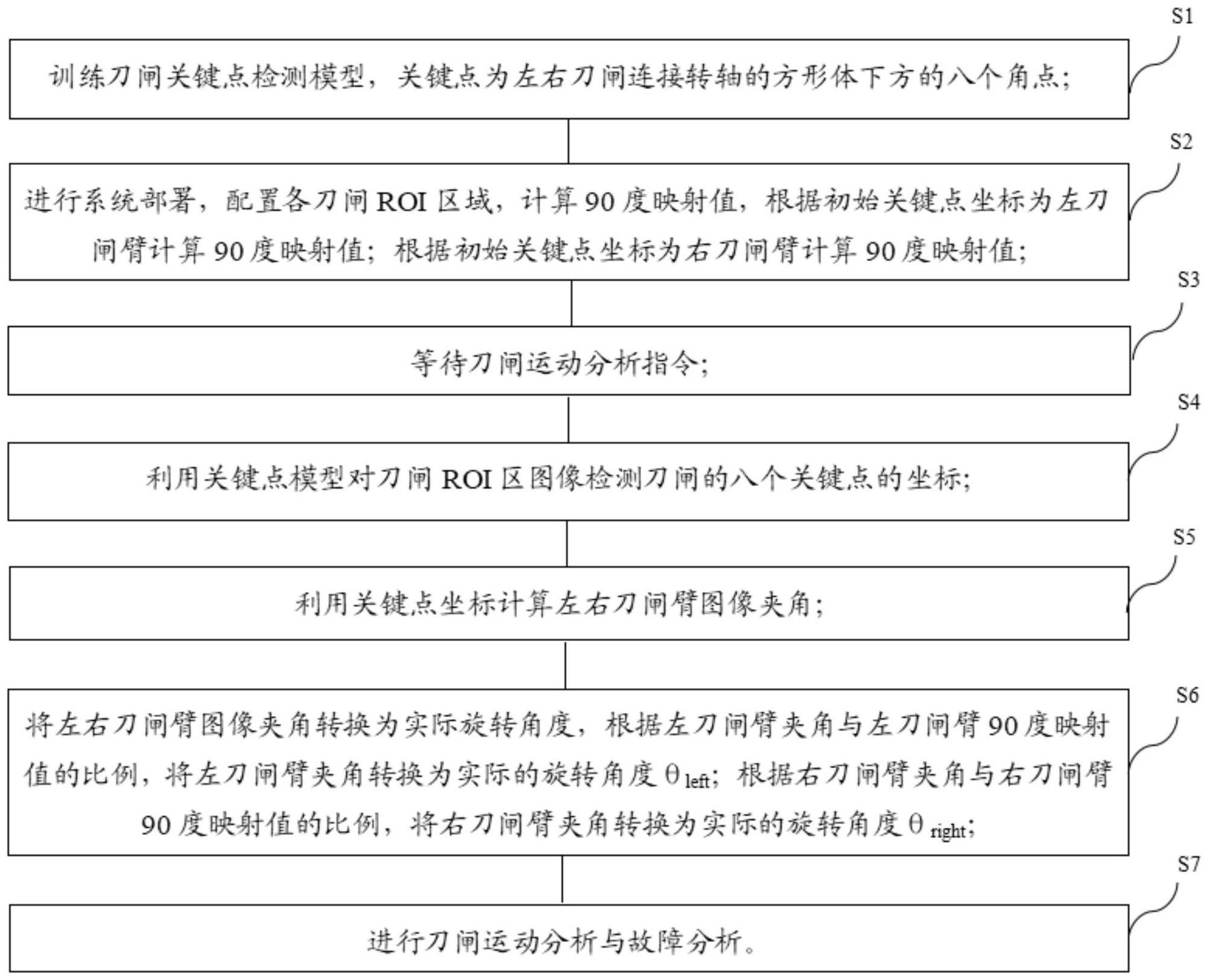
3、训练刀闸关键点检测模型;
4、进行系统部署,配置各刀闸roi区域,计算90度映射值;
5、等待刀闸运动分析指令;
6、利用关键点模型对刀闸roi区图像检测刀闸的八个关键点的坐标;
7、利用关键点坐标计算左右刀闸臂图像夹角;
8、将左右刀闸臂图像夹角转换为实际旋转角度;
9、进行刀闸运动分析与故障分析。
10、其中,在训练刀闸关键点检测模型的步骤中:
11、关键点为左右刀闸连接转轴的方形体下方的八个角点。
12、其中,在进行系统部署,配置各刀闸roi区域,计算90度映射值的步骤中:
13、根据初始关键点坐标为左刀闸臂计算90度映射值;根据初始关键点坐标为右刀闸臂计算90度映射值。
14、其中,在将左右刀闸臂图像夹角转换为实际旋转角度的步骤中,转换过程为:
15、根据左刀闸臂夹角与左刀闸臂90度映射值的比例,将左刀闸臂夹角转换为实际的旋转角度θleft;
16、根据右刀闸臂夹角与右刀闸臂90度映射值的比例,将右刀闸臂夹角转换为实际的旋转角度θright。
17、其中,在进行刀闸运动分析与故障分析的步骤中,运动分析过程为:
18、当三次检测中θleft或θright在不断增加,则认为刀闸正在打开中;
19、当三次检测中θleft或θright在不断减小,则认为刀闸正在闭合中;
20、当三次检测中θleft与θright的变化均小于一定值,则认为当前刀闸处于静止状态;
21、当θleft与θright均小于一定阈值,则认为刀闸处于闭合状态,否则处于分开状态。
22、其中,在进行刀闸运动分析与故障分析的步骤中,故障分析过程为:
23、当θleft与θright相差太大,则认为刀闸出现异常;
24、当刀闸的操作目标为打开,而实际旋转角度接近90度,则认为刀闸打开正常,否则认为分不到位;
25、当刀闸的操作目标为闭合,而实际旋转角度接近0度,则认为刀闸闭合正常,否则认为合不到位。
26、本发明的一种双侧水平旋转刀闸的角度测量及故障分析方法,训练刀闸关键点检测模型;进行系统部署,配置各刀闸roi区域,计算90度映射值;等待刀闸运动分析指令;利用关键点模型对刀闸roi区图像检测刀闸的八个关键点的坐标;利用关键点坐标计算左右刀闸臂图像夹角;将左右刀闸臂图像夹角转换为实际旋转角度;进行刀闸运动分析与故障分析;通过根据关键点坐标准确地计算刀闸在图像中的旋转角度,并根据刀闸本身的几何特征与旋转规律,将二维图像中的旋转角度映射到实际旋转角度,给用户更真实可信的角度值,利用深度学习技术,可适用于各种云台与非云台摄像机,具有较强的实用性,实现了提高检测的精确性,避免刀闸角度与状态检测出错。
技术特征:
1.一种双侧水平旋转刀闸的角度测量及故障分析方法,其特征在于,包括如下步骤:
2.如权利要求1所述的双侧水平旋转刀闸的角度测量及故障分析方法,其特征在于,在训练刀闸关键点检测模型的步骤中:
3.如权利要求1所述的双侧水平旋转刀闸的角度测量及故障分析方法,其特征在于,在进行系统部署,配置各刀闸roi区域,计算90度映射值的步骤中:
4.如权利要求1所述的双侧水平旋转刀闸的角度测量及故障分析方法,其特征在于,在将左右刀闸臂图像夹角转换为实际旋转角度的步骤中,转换过程为:
5.如权利要求1所述的双侧水平旋转刀闸的角度测量及故障分析方法,其特征在于,在进行刀闸运动分析与故障分析的步骤中,运动分析过程为:
6.如权利要求1所述的双侧水平旋转刀闸的角度测量及故障分析方法,其特征在于,在进行刀闸运动分析与故障分析的步骤中,故障分析过程为:
技术总结
本发明涉及刀闸检测技术领域,具体涉及一种双侧水平旋转刀闸的角度测量及故障分析方法;训练刀闸关键点检测模型;进行系统部署,配置各刀闸ROI区域,计算90度映射值;等待刀闸运动分析指令;利用关键点模型对刀闸ROI区图像检测刀闸的八个关键点的坐标;利用关键点坐标计算左右刀闸臂图像夹角;将左右刀闸臂图像夹角转换为实际旋转角度;进行刀闸运动分析与故障分析,通过根据关键点坐标准确地计算刀闸在图像中的旋转角度,并根据刀闸本身的几何特征与旋转规律,将二维图像中的旋转角度映射到实际旋转角度,给用户更真实可信的角度值,实现了提高检测的精确性,避免刀闸角度与状态检测出错。
技术研发人员:冯国进,胡茂福,陈军辉,穆科明
受保护的技术使用者:南京杰迈视讯科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!