级间分离试验中基于虚拟样机的特种机构碰撞预测方法与流程
本发明属于航空航天领域,具体涉及一种级间分离试验中基于虚拟样机的特种机构碰撞预测方法。
背景技术:
1、飞行器在进行多体分离的过程中具有复杂的空气动力学现象,多体之间受力非常复杂,从而使多体产生复杂的飞行轨迹,如果分离的姿态位置不合理,极易出现多体分离之后又相遇而发生重大分离事故。为了得到可靠的分离轨迹,需要通过风洞试验比较真实地模拟出飞行器各个分离阶段多体的分离轨迹,以指导飞行器结构,分离策略设计。
2、虚拟样机技术是利用基于实物模型建立的高精度三维模型,并建立与实际机构驱动关节位置对应映射关系的一种仿真方法。虚拟样机技术具有现实与系统双向交互以及实时反馈的特点,其在航空航天,国防工业等邻域得到广泛应用。
3、在进行级间分离试验中,级间分离机构的轨迹是系统根据实时的气动力数据实时计算得来,在做试验前并不知道级间分离的轨迹。而风洞的试验段中空间狭窄,机构与风洞试验段的各种设备之间有碰撞的风险。目前成熟的碰撞预测常常采用包围盒的形式,此方法对具有复杂外形的飞行器模型精度不高。考虑到实际的情况下,级间分离之间可能到亚毫米级间距,常规的包围盒碰撞预测方法并不适用。
4、当前,亟需发展一种级间分离试验中基于虚拟样机的特种机构碰撞预测方法
技术实现思路
1、本发明所要解决的技术问题是提供一种级间分离试验中基于虚拟样机的特种机构碰撞预测方法,克服现有技术的缺陷。
2、本发明的级间分离试验中基于虚拟样机的特种机构碰撞预测方法,包括以下步骤:
3、s10.根据待检测机构建立虚拟样机三维模型;
4、虚拟样机三维模型包括待检测机构模型和喷管模型;待检测机构模型包括偏航机构模型、俯仰机构模型、滚转机构模型;
5、s20.将待检测机构模型中各个驱动关节设置为位置输入变量;
6、s30.获取位置输入变量,并建立待检测机构模型与待检测机构中各个驱动关节位置的映射关系;
7、s40.对虚拟样机三维模型按照标定标准进行标定,即标定虚拟机系统;
8、s50.对待检测机构进行级间分离试验,并实时同步待检测机构和虚拟样机三维模型的运动;
9、s60.对待检测机构和虚拟样机三维模型的运动进行帧切分,并根据虚拟样机三维模型当前帧的运动位置、速度、加速度,预测得到虚拟样机三维模型未来第n帧的位姿与速度;
10、s70.利用图元相交方法对未来第n帧待检测机构模型和喷管模型的进行碰撞情况预测;
11、s80.将未来第n帧的碰撞情况返回待检测机构的运动控制系统,进行待检测机构的运动决策。
12、进一步地,所述的待检测机构模型和喷管模型都采用三角面片包裹。
13、进一步地,所述的虚拟样机三维模型的标定标准为:待检测机构和虚拟样机三维模型的初始位姿完全一致,且待检测机构和虚拟样机三维模型各个驱动关节的相对位姿完全一致。
14、进一步地,所述的对待检测机构和虚拟样机三维模型的运动进行帧切分的标准为:虚拟样机三维模型根据当前帧的运动位置、速度、加速度,预测得到虚拟样机三维模型未来第n帧的位姿与速度所需的时间小于待检测机构运动一帧的时间。
15、进一步地,所述的虚拟样机三维模型的运动加速度设定为常值。
16、进一步地,虚拟样机三维模型通过基于开放的图形库opengl或者directx技术显示。
17、进一步地,所述的运动决策包括:若预测发生碰撞,则将该机构速度逐渐降为零;若预测不发生碰撞,则该机构按照计划轨迹继续运动。
18、进一步地,所述的利用图元相交方法对未来第n帧待检测机构模型和喷管模型的碰撞情况进行预测的步骤包括:
19、s71.记待检测的两个三角面片为 t1和 t2;其中,三角面片 t1属于待检测机构模型,三角面片 t2属于喷管模型;
20、记三角面片 t1的三个顶点为、、;记三角面片 t2的三个顶点为、、;其中,为顶点的坐标;为顶点的坐标;为顶点的坐标;为顶点的坐标;为顶点的坐标;为顶点的坐标;
21、s72.计算参数、参数、参数,即:
22、;
23、s73.判断参数、参数、参数是否同号且均不为0,若是,则三角面片 t1和三角面片 t2在未来第n帧不发生相交,否则,进入步骤s74;
24、s74.判断参数、参数、参数是否同号且均为0,若是,则进入步骤s75,否则,进入步骤s76;
25、s75.将三角面片 t1和三角面片 t2的顶点坐标转换为二维坐标,得到、、、、、;
26、以三角面片 t1的任意一条边建立直线参数方程ax+by+c=0,并将三角面片 t1和三角面片 t2的二维顶点坐标代入直线参数方程,得到:
27、;
28、若参数、参数参数同号,且与参数异号,则三角面片 t1和三角面片 t2在未来第n帧不发生相交,否则,三角面片 t1和三角面片 t2在未来第n帧相交;
29、s76.在三角面片 t1上建立坐标系o1x1y1,并将三角面片 t1和三角面片 t2在顶点坐标转换到坐标系o1x1y1中;判断直线、直线、直线与o1x1y1平面的交点p1、交点p2、交点p3中,是否存在位于三角形内、且位于三角形某条边上的交点,若是,则三角面片 t1和三角面片 t2在未来第n帧相交,否则,进入步骤s77;
30、s77.在三角面片 t2上建立坐标系o2x2y2,并将三角面片 t1和三角面片 t2在顶点坐标转换到坐标系o2x2y2中;判断直线、直线、直线与o2x2y2平面的交点p4、交点p5、交点p6中,是否存在位于三角形内、且位于三角形某条边上的交点,若是,则三角面片 t1和三角面片 t2在未来第n帧相交,若否,则三角面片 t1和三角面片 t2在未来第n帧不发生相交;
31、s78.更新待检测三角面片 t1和三角面片 t2,并返回步骤1),直到确定待检测机构模型中每个待检测三角面片和喷管模型所有待检测三角面片是否在未来第n帧发生相交,进而判断待检测机构模型和喷管模型在未来第n帧是否发生碰撞。
32、进一步地,所述的碰撞情况预测包括:若待检测机构模型中存在某个待检测三角面片与喷管模型某个待检测三角面片在未来第n帧发生相交,则待检测机构模型和喷管模型在未来第n帧发生碰撞;
33、若待检测机构模型中每个三角面片和喷管模型所有三角面片在未来第n帧均不相交,则待检测机构模型和喷管模型在未来第n帧不发生碰撞。
34、进一步地,所述的待检测三角面片包括速度方向与法线方向相同的三角面片。
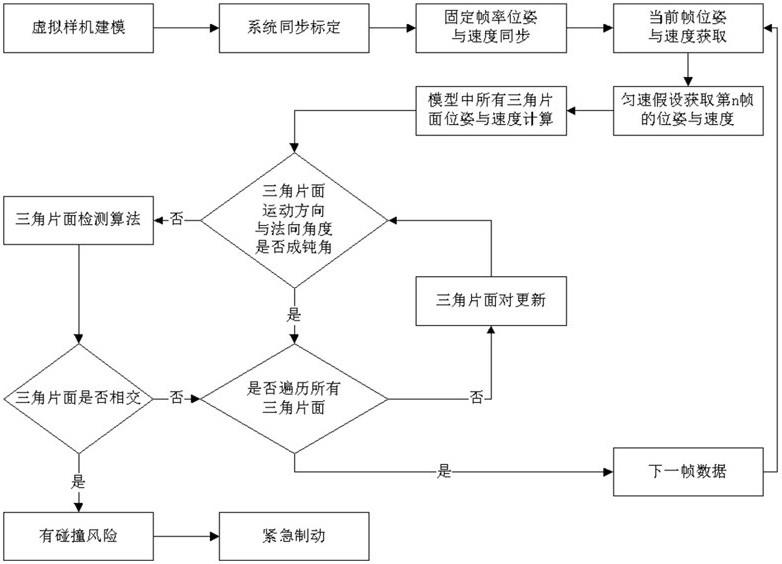
35、本发明的级间分离试验中基于虚拟样机的特种机构碰撞预测方法具有以下特点:在虚拟机里面根据需求建立高精度三维模型,并以三角面片进行包裹;建立虚拟样机中的各个驱动关节位置和实际机构的各个驱动关节位置的映射关系;标定虚拟机系统;进行级间分离试验。以帧为单位将机构运动切在1秒时间内分为多个帧运动,实时同步实际模型与虚拟样机模型的每一帧运动;在虚拟样机中,根据上一帧的运动位置,速度,加速度数据预测获得下一帧的位姿与速度数据;根据图元相交计算得到预测帧的位姿情况,得到预测帧下机构、模型的碰撞情况;虚拟样机将预测帧的碰撞信息返回运动控制系统,进行运动决策。
36、简而言之,本发明的级间分离试验中基于虚拟样机的特种机构碰撞预测方法建立了高精度的整个试验段、机构、分离体的三维数字模型,用以预测试验过程中的碰撞预测;建立了独立于控制系统、且图形计算更优的虚拟机系统,虚拟机系统通过高速通信协议进行通信,在进行碰撞预测时可以较小的占用plc资源;通过计算机opengl或者directx技术进行实时地显示,让用户对整个运动过程进行实时的监控,甚至人工介入碰撞预测;在三角面片图元相交计算时,只检测三角面片速度方向与其法线方向相同的三角面片,在保证碰撞预测的精度的同时提高了效率。本发明的级间分离试验中基于虚拟样机的特种机构碰撞预测方法能够高精度地进行实时的碰撞预测,提高了整个级间分离的安全性。
- 还没有人留言评论。精彩留言会获得点赞!