一种割台控制方法及装置与流程
本技术涉及数据处理领域,具体涉及一种割台控制方法及装置。
背景技术:
1、在农业生产过程中,由于大风天气的出现,水稻会出现倒伏现象,在水稻成熟期,使用收割机收割水稻时,需要调整水稻收割机割台的高度,以收割倒伏的水稻。
2、相关技术中,采用双目相机对水稻与割台之间的距离进行测量,利用双目的立体视觉技术,通过双目相机的标定结果对原始图像校正,并对校正后的图像进行像素点匹配,获得图像中各个像素的深度信息,根据深度信息进行测距,调整割台高度。但是,双目相机在进行特征点匹配时,容易受到光照影响,像素深度信息不准确,进而导致测距结果不准确,倒伏作物收割效率较低;同时,使用双目相机的成本也较高。
技术实现思路
1、本技术实施例提供了一种割台控制方法及装置,能够提高倒伏作物收割效率。
2、有鉴于此,本技术第一方面提供了一种割台控制方法,所述方法包括:
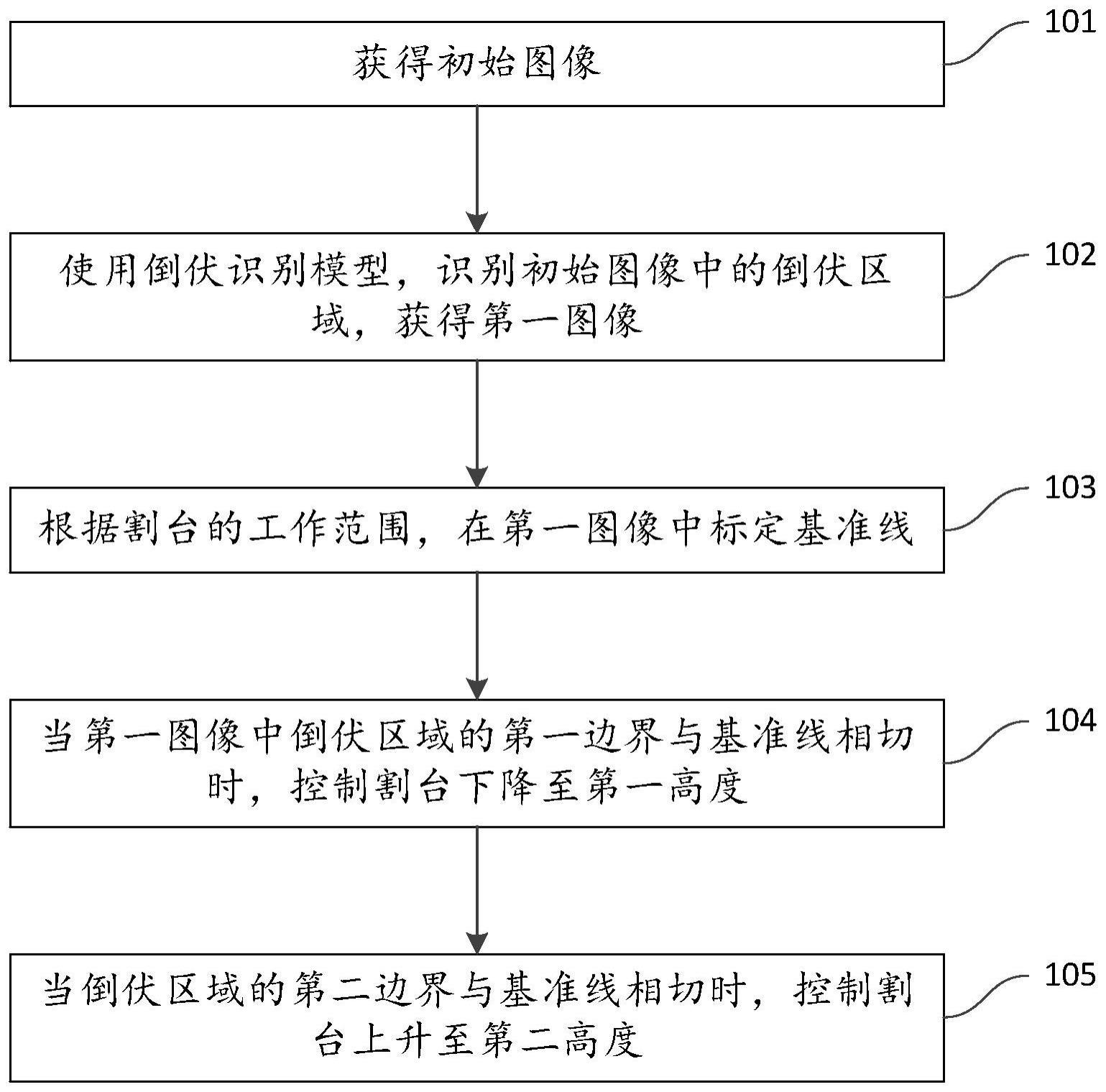
3、获得初始图像;其中,所述初始图像为通过单目相机采集的二维平面图像,所述单目相机的图像采集区域包括割台的工作范围;
4、使用倒伏识别模型,识别所述初始图像中的倒伏区域,获得第一图像;其中,所述第一图像中标有所述倒伏区域,所述第一图像的下边界与所述割台距离最近,所述第一图像的上边界与所述割台距离最远;
5、根据所述割台的工作范围,在所述第一图像中标定基准线;其中,所述基准线用于作为所述割台的高度控制依据,以控制所述割台触达所述倒伏区域内待收割作物;
6、当所述第一图像中所述倒伏区域的第一边界与所述基准线相切时,控制所述割台下降至第一高度;其中,所述第一边界为所述倒伏区域距离所述割台最近的边界;
7、当所述倒伏区域的第二边界与所述基准线相切时,控制所述割台上升至第二高度;其中,所述第二高度高于所述第一高度,所述第二边界为所述倒伏区域距离所述割台最远的边界。
8、可选地,所述根据割台的工作范围,在所述第一图像中标定基准线包括:
9、在实际工作场景中,标记出割台的工作范围;
10、根据所述实际工作场景与所述第一图像之间的对应关系,在第一图像中,确定所述工作范围对应的工作区域,并基于所述工作区域的边界确定基准线;
11、在所述第一图像中标定所述基准线。
12、可选地,所述使用倒伏识别模型,识别所述初始图像中的倒伏区域,获得第一图像包括:
13、将所述初始图像输入倒伏识别模型,获得所述初始图像中的第一区域;其中,所述第一区域包括所述倒伏识别模型从所述初始图像中识别出存在作物倒伏的所有区域;
14、根据所述第一区域的边界,计算所述第一区域的周长;
15、当所述第一区域的周长不小于预设周长时,将所述第一区域确定为倒伏区域;
16、在所述初始图像中标出所述倒伏区域,并生成第一图像。
17、可选地,所述当所述倒伏区域的第二边界与所述基准线相切时,控制所述割台上升至第二高度包括:
18、当所述倒伏区域的第二边界与所述基准线相切时,执行校验步骤;
19、在所述校验步骤中,从所述初始图像对应的采集时间开始,取所述采集时间之后预设时间内的连续n帧图像,分别判断在所述n帧图像中,所述倒伏区域的第二边界与所述基准线是否相切,如果是,则控制所述割台上升至第二高度;其中,n为大于1的整数。
20、可选地,所述倒伏识别模型的训练方法包括如下步骤:
21、采集训练图像,并在所述训练图像中标记倒伏区域,获得训练集;
22、基于所述训练集训练语义分割网络模型,得到所述倒伏识别模型。
23、本技术第二方面提供了一种割台控制装置,所述装置包括:
24、图像获取单元,用于:获得初始图像;其中,所述初始图像为通过单目相机采集的二维平面图像,所述单目相机的图像采集区域包括割台的工作范围;
25、倒伏区域识别单元,用于:使用倒伏识别模型,识别所述初始图像中的倒伏区域,获得第一图像;其中,所述第一图像中标有所述倒伏区域,所述第一图像的下边界与所述割台距离最近,所述第一图像的上边界与所述割台距离最远;
26、基准线标定单元,用于:根据所述割台的工作范围,在所述第一图像中标定基准线;其中,所述基准线用于作为所述割台的高度控制依据,以控制所述割台触达所述倒伏区域内待收割作物;
27、割台控制单元,用于:当所述第一图像中所述倒伏区域的第一边界与所述基准线相切时,控制所述割台下降至第一高度;其中,所述第一边界为所述倒伏区域距离所述割台最近的边界;
28、所述割台控制单元还用于:当所述倒伏区域的第二边界与所述基准线相切时,控制所述割台上升至第二高度;其中,所述第二高度高于所述第一高度,所述第二边界为所述倒伏区域距离所述割台最远的边界。
29、可选地,所述基准线标定单元具体用于:
30、在实际工作场景中,标记出割台的工作范围;
31、根据所述实际工作场景与所述第一图像之间的对应关系,在第一图像中,确定所述工作范围对应的工作区域,并基于所述工作区域的边界确定基准线;
32、在所述第一图像中标定所述基准线。
33、可选地,所述倒伏区域识别单元具体用于:
34、将所述初始图像输入倒伏识别模型,获得所述初始图像中的第一区域;其中,所述第一区域包括所述倒伏识别模型从所述初始图像中识别出存在作物倒伏的所有区域;
35、根据所述第一区域的边界,计算所述第一区域的周长;
36、当所述第一区域的周长不小于预设周长时,将所述第一区域确定为倒伏区域;
37、在所述初始图像中标出所述倒伏区域,并生成第一图像。
38、可选地,所述割台控制单元具体用于:
39、当所述倒伏区域的第二边界与所述基准线相切时,执行校验步骤;
40、在所述校验步骤中,从所述初始图像对应的采集时间开始,取所述采集时间之后预设时间内的连续n帧图像,分别判断在所述n帧图像中,所述倒伏区域的第二边界与所述基准线是否相切,如果是,则控制所述割台上升至第二高度;其中,n为大于1的整数。
41、可选地,所述装置进一步包括模型训练单元,用于:
42、采集训练图像,并在所述训练图像中标记倒伏区域,获得训练集;
43、基于所述训练集训练语义分割网络模型,得到所述倒伏识别模型。
44、从以上技术方案可以看出,本技术具有以下优点:本技术通过单目相机采集二维平面图像,获得初始图像;其中,单目相机的图像采集区域包括割台的工作范围;单目相机的系统结构简单,成本较低,通过单目相机采集图像降低了图像采集成本;使用倒伏识别模型,识别初始图像中的倒伏区域,获得第一图像;其中,第一图像中标有倒伏区域,第一图像的下边界与割台距离最近,第一图像的上边界与割台距离最远;根据割台的工作范围,在第一图像中标定基准线;其中,基准线用于作为割台的高度控制依据,以控制割台触达倒伏区域内待收割作物;通过三维空间位置与二维平面图像的对应,在第一图像中标定基准线,来判断倒伏区域与割台之间的距离,实现了在作物收割场景下使用单目相机测距的功能,简化了测距步骤,节省了相机测距成本;当第一图像中倒伏区域的第一边界与基准线相切时,控制割台下降至第一高度;其中,第一边界为倒伏区域距离割台最近的边界;当倒伏区域的第二边界与基准线相切时,控制割台上升至第二高度;其中,第二高度高于第一高度,第二边界为倒伏区域距离割台最远的边界;通过割台与倒伏区域之间位置关系的判断,控制割台的上升或下降,实现对倒伏作物的收割,提高了作物收割效率。
- 还没有人留言评论。精彩留言会获得点赞!