一种野外环境下的地形语义地图构建方法及系统
本发明涉及地图构建,特别是涉及一种野外环境下的地形语义地图构建方法及系统。
背景技术:
1、随着科学技术的不断发展和时代的进步,对智能体提出了新的要求,无人车作为典型的智能体,其应用场景受到了研究人员的重视。无人车的基础行进任务一般可以分为三个部分,分别是环境感知、路径规划和本体控制。其中,环境感知是指无人车利用自身携带的传感器(例如摄像头、激光雷达等)对周围的未知环境进行感知,了解未知环境中存在的物体和无人车此时所处的位置,同时对传感器采集到的数据进行处理分析以得到当前的环境地图。路径规划是指无人车在得到一个目标点位置后,对当前位置到目标点位置之间的路径进行合理的规划,其中涉及到动态障碍物躲避、局部路径规划和全局路径规划等任务。本体控制是指无人车根据路径规划的结果对自身的运动单元进行控制,例如控制电机转速等,使得无人车能够安全的到达目标点。而在野外的极端环境中,空间环境的时刻变化导致先验地图的适用性下降或者是根本没有环境地图,因此导致了无人车在野外环境下的自主工作能力极差。
2、目前在野外环境下进行环境地图的构建时,主要有如下两种方式:(1)将单目相机或者深度相机作为无人车感知环境的传感器,在进行深度图对齐过后,对前后两帧图像进行特征提取和特征匹配,计算出相机旋转矩阵,通过对相机旋转矩阵的变换则可以得到无人车的位姿变换,进而构建视觉里程计得出环境地图。(2)将激光雷达作为无人车感知环境的传感器,对激光雷达采集到的前后两帧点云数据进行特征提取,利用提取的特征计算激光雷达的位姿变换矩阵,即可进一步得到无人车本身的位姿变换矩阵,通过无人车的位姿变换矩阵可以构建激光雷达里程计,进而可以得出未知环境的环境信息并构建环境地图。但上述两种现有的方法均存在环境中的动态物体会较大程度的影响建图精度以及没有将地形语义信息纳入最终构建的环境地图的缺陷。
3、基于此,亟需一种新型的野外环境下的地形语义地图构建技术。
技术实现思路
1、本发明的目的是提供一种野外环境下的地形语义地图构建方法及系统,可在构建环境地图的过程中去除动态物体的影响,提高建图精度,同时将地形语义信息纳入最终构建的环境地图中,得到地形语义地图,使无人车对自身的定位更加精确,有利于无人车的自主移动。
2、为实现上述目的,本发明提供了如下方案:
3、一种野外环境下的地形语义地图构建方法,所述构建方法包括:
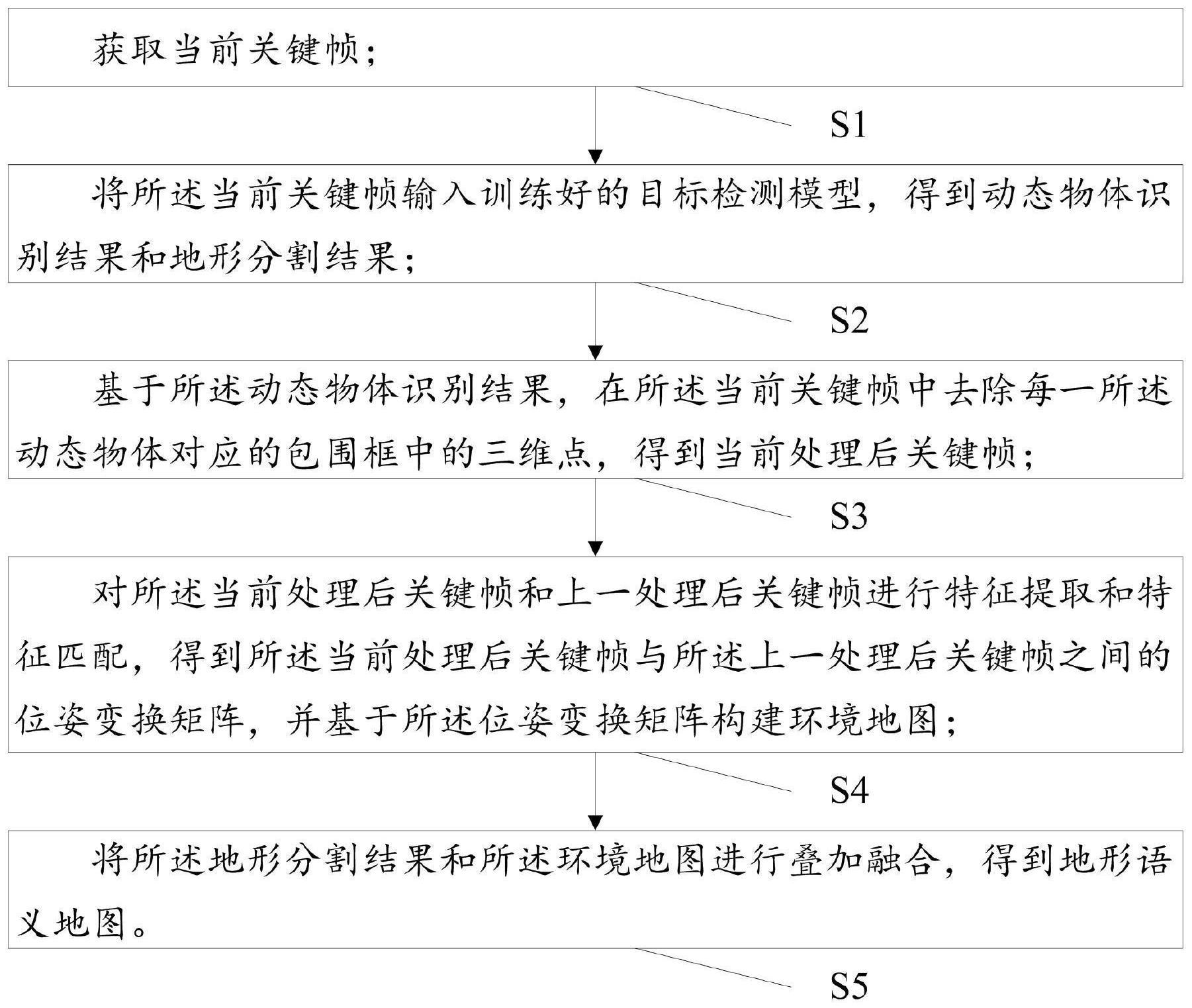
4、获取当前关键帧;所述当前关键帧为无人车在野外环境运动时,由无人车上搭载的激光雷达对无人车周围环境进行扫描所得到的一帧三维环境点云数据;
5、将所述当前关键帧输入训练好的目标检测模型,得到动态物体识别结果和地形分割结果;所述动态物体识别结果包括所述当前关键帧中每一动态物体对应的包围框的位置,所述动态物体包括人和车辆;所述地形分割结果包括所述当前关键帧中位于地面的三维点对应的地形语义信息,所述地形语义信息包括草地、土地、水泥地;
6、基于所述动态物体识别结果,在所述当前关键帧中去除每一所述动态物体对应的包围框中的三维点,得到当前处理后关键帧;
7、对所述当前处理后关键帧和上一处理后关键帧进行特征提取和特征匹配,得到所述当前处理后关键帧与所述上一处理后关键帧之间的位姿变换矩阵,并基于所述位姿变换矩阵构建环境地图;
8、将所述地形分割结果和所述环境地图进行叠加融合,得到地形语义地图。
9、在一些实施例中,所述获取当前关键帧具体包括:
10、在无人车在野外环境运动的过程中,实时获取由无人车上搭载的激光雷达对无人车周围环境进行扫描所得到的三维环境点云数据;所述激光雷达为固态激光雷达;
11、每间隔n帧,则选取一帧所述三维环境点云数据作为当前关键帧。
12、在一些实施例中,在将所述当前关键帧输入训练好的目标检测模型之前,所述构建方法还包括:对所述当前关键帧进行预处理,具体包括:
13、利用基于欧式聚类和k-means聚类的联合聚类方法对所述当前关键帧进行去噪处理,得到去噪后关键帧;
14、利用预先标定得到的无人车与激光雷达之间的位姿变换矩阵对所述去噪后关键帧进行坐标变换,将所述去噪后关键帧中的各个三维点的坐标转换到无人车的坐标系下,得到变换后关键帧,并以所述变换后关键帧作为新的当前关键帧。
15、在一些实施例中,所述对所述当前处理后关键帧和上一处理后关键帧进行特征提取和特征匹配,得到所述当前处理后关键帧与所述上一处理后关键帧之间的位姿变换矩阵具体包括:
16、对所述当前处理后关键帧进行特征提取,得到所述当前处理后关键帧的特征;所述当前处理后关键帧的特征包括所述当前处理后关键帧中每一三维点的类型,所述类型包括角特征点和面特征点;
17、将所述当前处理后关键帧的特征与上一处理后关键帧的特征进行特征匹配,得到特征匹配结果;所述特征匹配结果包括匹配成功的特征点对,所述特征点对包括所述当前处理后关键帧中的一个三维点和所述上一处理后关键帧中的一个三维点;
18、基于所述特征匹配结果计算所述当前处理后关键帧与所述上一处理后关键帧之间的位姿变换矩阵。
19、在一些实施例中,所述基于所述特征匹配结果计算所述当前处理后关键帧与所述上一处理后关键帧之间的位姿变换矩阵具体包括:基于所述特征匹配结果,利用icp算法计算所述当前处理后关键帧与所述上一处理后关键帧之间的位姿变换矩阵。
20、在一些实施例中,所述基于所述位姿变换矩阵构建环境地图具体包括:
21、利用所述位姿变换矩阵将所述当前处理后关键帧中各个三维点的坐标转换到第一帧关键帧对应的坐标系下,得到坐标转换关键帧;
22、将所述坐标转换关键帧与所述上一处理后关键帧对应的历史环境地图进行叠加,得到环境地图。
23、在一些实施例中,在将所述地形分割结果和所述环境地图进行叠加融合之前,所述构建方法还包括:
24、利用ndt算法对所述当前处理后关键帧和所述环境地图进行匹配,得到匹配分数;
25、判断所述匹配分数是否大于预设阈值;
26、若是,则利用图优化方法对所述环境地图进行优化,得到优化后地图,并以所述优化后地图作为新的环境地图。
27、在一些实施例中,在得到地形语义地图之后,所述构建方法还包括:
28、利用欧式聚类算法对所述地形语义地图进行聚类,得到多个聚类;
29、计算每一所述聚类的重心;
30、在所述地形语义地图中只保留每一所述聚类的重心,得到新的地形语义地图。
31、一种野外环境下的地形语义地图构建系统,所述构建系统包括:
32、关键帧获取模块,用于获取当前关键帧;所述当前关键帧为无人车在野外环境运动时,由无人车上搭载的激光雷达对无人车周围环境进行扫描所得到的一帧三维环境点云数据;
33、目标检测模块,用于将所述当前关键帧输入训练好的目标检测模型,得到动态物体识别结果和地形分割结果;所述动态物体识别结果包括所述当前关键帧中每一动态物体对应的包围框的位置,所述动态物体包括人和车辆;所述地形分割结果包括所述当前关键帧中位于地面的三维点对应的地形语义信息,所述地形语义信息包括草地、土地、水泥地;
34、动态物体去除模块,用于基于所述动态物体识别结果,在所述当前关键帧中去除每一所述动态物体对应的包围框中的三维点,得到当前处理后关键帧;
35、地图构建模块,用于对所述当前处理后关键帧和上一处理后关键帧进行特征提取和特征匹配,得到所述当前处理后关键帧与所述上一处理后关键帧之间的位姿变换矩阵,并基于所述位姿变换矩阵构建环境地图;
36、地形信息叠加模块,用于将所述地形分割结果和所述环境地图进行叠加融合,得到地形语义地图。
37、根据本发明提供的具体实施例,本发明公开了以下技术效果:
38、本发明用于提供一种野外环境下的地形语义地图构建方法及系统,将当前关键帧输入训练好的目标检测模型,得到动态物体识别结果和地形分割结果,并基于动态物体识别结果在当前关键帧中去除每一动态物体对应的包围框中的三维点,得到当前处理后关键帧,然后对当前处理后关键帧和上一处理后关键帧进行特征提取和特征匹配,得到位姿变换矩阵,进一步构建环境地图,从而可在构建环境地图的过程中去除动态物体的影响,提高建图精度,最后将地形分割结果和环境地图进行叠加融合,得到地形语义地图,从而可将地形语义信息纳入最终构建的环境地图中,得到地形语义地图,使无人车对自身的定位更加精确,有利于无人车的自主移动。
- 还没有人留言评论。精彩留言会获得点赞!