一种船体装配线划线路径优化方法
本发明属于产品自动化加工,涉及基于改进免疫优化算法的划线路径规划技术,尤其涉及一种船体装配线划线路径优化方法。
背景技术:
1、船体组立装配是船舶制造的重要环节,而装配线作为组立装配、焊接等工序的定位基准,是保障装配精度、提高产品质量的关键。装配线划线路径的合理有序规划,能有效减少数控划线枪的起落次数和空走行程,对提高划线作业效率、降低能源消耗起着至关重要的作用。
2、随着数控技术的日益完善以及船舶制造工艺需求的不断提高,船体装配线数量不断增加,使得划线路径组合优化难度进一步增加。传统的装配线划线路径规划方法,过于依赖人工交互,规划效率较低,当装配线数众多时其优化效果有待检验。随着智能优化算法快速发展,在划线路径规划中得到尝试并成功应用,通过合理设置算法基本参数或改进算法算子,针对划线作业过程中所涉及的相关因素为优化指标并建立目标函数,通过优化算法的多次迭代,最终得到划线效率高、能源消耗低的最优划线路径。引入智能算法虽然加快了划线路径的求解速度,提高了划线作业效率,但随着装配线的不断增加,优化难度会呈指数级的速度增长,面对非线性、高复杂度的高维划线路径优化问题,如何确保规划精度和稳定性还有待进一步优化。
3、因此,开展船体装配线划线路径优化的研究,对于降低船体建造的生产周期和成本,节约大量的人力物力,对实现船舶的数字化、智能化制造具有十分重要的意义。
技术实现思路
1、本发明的目的在于解决复杂船体装配线划线路径优化时规划精度低、收敛效率差等问题,提高数控划线枪的作业效率,而提供一种船体装配线划线路径优化方法。
2、为了达到上述目的,本发明采取如下技术方案予以实现:
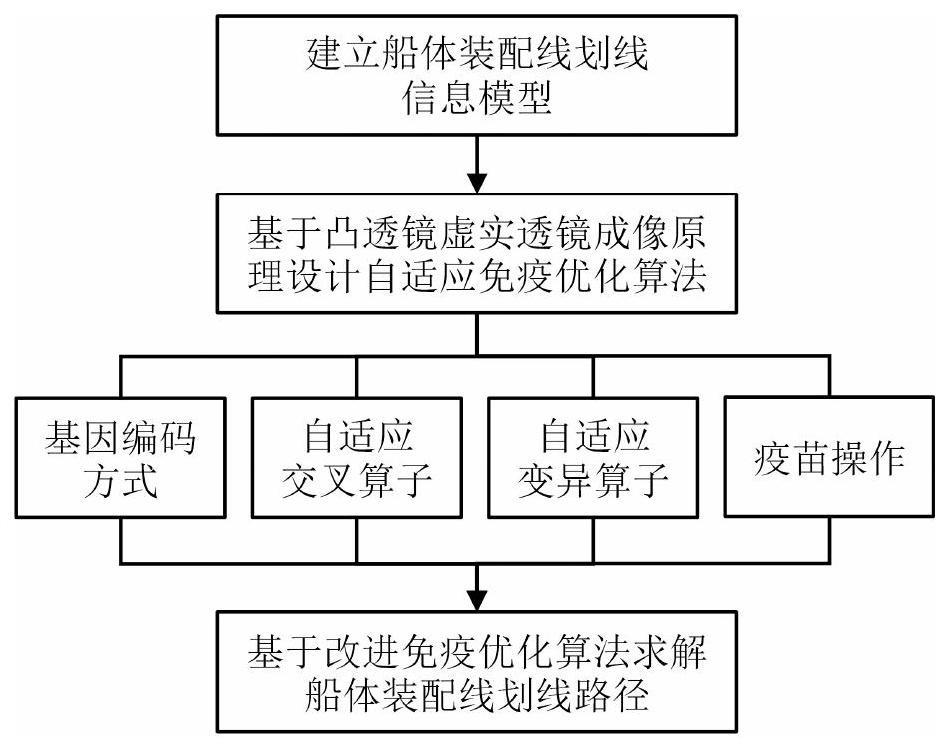
3、一种船体装配线划线路径优化方法,首先以划线枪空走行程和装配线划线方向建立目标优化函数;然后基于凸透镜虚实成像原理设计一种自适应免疫优化算法(adaptiveimmune optimization algorithm based on lens imaging principle,ioalip);最后基于改进免疫优化算法对船体装配线划线路径进行求解。具体采用如下步骤:
4、步骤1.建立船体装配线划线信息模型;
5、所述船体装配线划线信息模型,包括装配线划线方向定义和目标函数f建立。
6、步骤2.基于凸透镜虚实透镜成像原理设计自适应免疫优化算法;
7、所述自适应免疫优化算法,包括基因编码方式、自适应交叉算子设计、自适应变异算子设计和疫苗操作。
8、步骤3.基于改进免疫优化算法求解船体装配线划线路径。
9、进一步,步骤1所述船体装配线划线信息模型,包括装配线划线方向定义和目标函数f建立,所述装配线划线方向定义的方法,具体采用如下步骤:
10、设装配线的起点a(xa,ya)、终点b(xb,yb),并满足xa<xb(或xa=xb且ya<yb),则正方向即从装配线的起点a到终点b,反方向即从装配线的终点b到起点a。
11、所述目标函数f计算如下:
12、
13、式中,d(ci,cj)表示装配线ci和cj之间的空走距离,具体计算如下:
14、
15、进一步,步骤2所述基于凸透镜虚实透镜成像原理设计自适应免疫优化算法,包括基因编码方式、自适应交叉算子设计、自适应变异算子设计和疫苗操作。所述基因编码方式,采用基因组形式,并通过实数编码方法对整个装配线信息进行表述,每个基因组由装配线编号gi和划线方向ai组成如下所示:
16、{(g1,a1),(g2,a2),…,(gl,al)}
17、所述自适应交叉算子设计,包括交叉概率pc动态调整和自适应交叉操作,所述交叉概率pc动态调整的计算如下:
18、
19、式中,kc1、kc2∈(0,1);g为当前种群进化代数;gmax为总进化代数;n为种群个数。
20、所述自适应交叉操作a'(g)←tc(a(g))的具体方法,采用如下步骤:
21、a)计算当前种群中各个体的交叉概率pc,对每个个体随机生成一个(0,1)范围内的数bc;当bc≤pc,则对应个体ai需进行交叉操作,从而获取当前种群的待交叉个体c(g)。
22、b)将所有待交叉个体c(g)两两随机组合进行交叉操作,对每对待交叉个体随机选择一条装配线gq其作为交叉点q,并初始化子代个体bi,将装配线gq保存到子代bi。
23、c)分别从父代ai、aj查找出装配线gq的下一条装配线giq+1、gjq+1,并计算d(gq,giq+1)和d(gq,gjq+1)。
24、d)判断d(gq,giq+1)和d(gq,gjq+1)的大小。当d(gq,giq+1)≤d(gq,gjq+1),则将装配线giq+1保存到子代bi中,同时删除装配线gq,并令gq=giq+1;当d(gq,giq+1)>d(gq,gjq+1),则将装配线gjq+1保存到子代bi中,同时删除装配线gq,并令gq=gjq+1。
25、e)判断父代ai、aj中装配线的个数。若只有一条,则将该条装配线到子代bi中,并结束交叉操作;否则,转入步骤c)。
26、同理,将步骤c)至步骤e)中的相关操作改为查找装配线gq的上一条装配线giq-1、gjq-1,并判断d(gq,giq-1)和d(gq,gjq-1),即可得到子代个体bj。将全部待交叉个体c(g)执行交叉操作,即可获得种群a′(g)。
27、所述自适应变异算子设计,包括变异概率pv动态调整和自适应变异操作,所述变异概率pv动态调整的计算如下:
28、
29、式中,kv1、kv2∈(0,1);cv为当前种群平均浓度;n为种群个数;c0为常数且满足c0<pv0/kv1(其中:pv0为初始变异率)。
30、所述自适应变异操作a”(g)←tv(a'(g))的具体方法,采用如下步骤:
31、ⅰ)计算当前种群的变异概率pv,对每个个体随机生成一个(0,1)范围内的数bv;若bv≤pv,则对应个体a′i需进行变异操作。
32、ⅱ)对待变异个体a′i进行装配线划线顺序上的变异。随机生成两个[1,l]范围内不相等的整数m、n,并将mv=2(m-1)+1和nv=2(n-1)+1两个数所对应基因位上的组立编号gm和gn进行对调。
33、所述疫苗操作a3(g)←tin(a2(g))的方法,具体采用如下步骤:
34、i)疫苗选取,比较子代种群a2(g)和疫苗库v(g)中个体的适应度值,选取前τ个优势个体更新疫苗库。
35、j)疫苗接种,从子代种群a2(g)中选取后τ个劣势个体与疫苗库v(g)中的个体进行随机单点交叉操作,并采用精英保留策略,从而生成新种群a3(g),完成疫苗接种,即
36、sp(g)={asi|1≤i≤τ,asi∈sort(a2(g))},sg(g)={asi|τ+1≤i≤n,asi∈sort(a2(g))}
37、sc(g)←sort(ts(sp(g)∪v(g)))=sort({s1,s2,…,s2τ})={s′1,s′2,…,s′2τ}
38、a3(g)=sg(g)∪s(g),s(g)={s′i|τ+1≤i≤2τ,s′i∈sc(g)
39、式中,ts(·)表示随机单点交叉操作。
40、进一步,步骤3所述基于改进免疫优化算法求解船体装配线划线路径的方法,具体采用如下步骤:
41、a)参数初始化:船体装配线个数l,种群规模n、最大迭代次数gmax和算法其他参数,g←0;
42、b)随机生成n个个体构成初始种群a(0)={ai|1≤i≤n};
43、c)计算种群中各个体的适应度f(xi)、浓度d(xi)和期望繁殖率e(xi);并对各个体按期望繁殖率e(xi)降序排序,取前n个个体构成父代种群a1(g),取前τ个个体存入记忆库;
44、d)基于轮盘赌对父代种群a1(g)进行选择操作生成新种群a1'(g);
45、e)对种群a1'(g)进行自适应交叉a1”(g)←tc(a1'(g))和自适应变异a1”′(g)←tv(a1”(g)),得到子代种群a2(g);
46、f)疫苗选取与接种,生成新种群a3(g)←tin(a2(g));
47、g)判断当前迭代次数是否等于最大迭代次数。若满足条件,则算法结束并输出装配线划线路径的最优解;否则,将种群a3(g)与记忆库中的个体共同构成下一代种群a(g+1),并转步骤c)。
48、本发明具有以下有益效果:
49、(1)本发明在凸透镜虚实成像原理的启发下,引入自适应交叉和变异操作,实现了基于种群进化代数和种群平均浓度的自适应调节,大大提高了算法搜索效率和种群多样性,加快了收敛速度,同时,引用疫苗操作有效保护了优秀个体,进一步提高了免疫算法的进化效率。
50、(2)本发明基于划线枪的空走距离和装配线的划线方向来构建适应度函数,充分考虑了数控划线枪作业过程中的影响因素,能有效减少数控划线枪的起落次数和划线空程,确保划线枪总移动距离最小化单位时间内生产量的最大化,提高作业效率,降低能源消耗,同时,能适应复杂、特殊的划线作业要求,使得划线路径更具合理性和正确性。
51、(3)本发明所提出的基于强搜索能力和高收敛性的ioalip求解船体组立装配线划线路径优化问题,在快速收敛到全局最优解的同时,能有效降低船体建造的生产周期和成本,节约大量的人力物力,对实现船舶的数字化、智能化制造具有十分重要的意义。
- 还没有人留言评论。精彩留言会获得点赞!