一种重型车辆智能防撞检测方法及系统
本发明涉及车辆智能制造领域,尤其涉及一种重型车辆智能防撞检测方法及系统。
背景技术:
1、近年来,随着汽车保有量的增加,交通事故给世界人民的生命财产造成了巨大的损失。通过对大量交通事故进行分析之后,主要影响因素可以归结为三个方面:环境因素、驾驶员因素和车辆因素。其中,影响最大的是驾驶员因素,很多交通事故都是由于驾驶员的疏忽、疲劳驾驶、醉酒驾驶、判断错误和超速驾驶等原因造成的。有关研究数据表明,如果能准确地进行安全预警,能够为驾驶员采取措施避免碰撞或降低碰撞产生的伤害赢得足够的反应时间,至少可以避免六成以上的追尾碰撞事故。可见,智能防撞安全系统对整个汽车安全来说是非常重要的。
2、目前,车载智能行车预警系统主要通过车载有源传感器和无源传感器这两种方法来实现。有源传感器主要通过主动发送电磁波信号(如毫米波、激光)或者超声波信号来实现对行车环境中障碍物的探测,其优点是速度快、精度相对较高,缺点是空间分辨率低、扫描速度慢、设备成本高、目标识别性差等。无源传感器主要通过光学相机来实现,相比于有源设备,通过光学相机和现代图像处理技术能够有效的识别出车辆、行人等障碍物,适用范围广,且安装和实施成本较低,对天气等环境因素依赖性低、适应性较强。因此,仅仅使用单一传感器很难满足车辆对外界环境的高精度感知,也无法同时获得障碍物的形状尺寸、位置距离信息,除此之外,单一源传感器的使用还存在着虚报、误报、实时性差等问题。总而言之,目前车辆的智能防撞系统的实时性、准确性、可靠性、适用性都有待提高。
技术实现思路
1、本发明主要目的为了克服上述背景技术的不足,提供一种重型车辆智能防撞检测方法及系统,使其解决了现有技术中留给驾驶员的反应时间少、虚警率高、实时性差的问题。
2、本发明所采用的技术方案是:
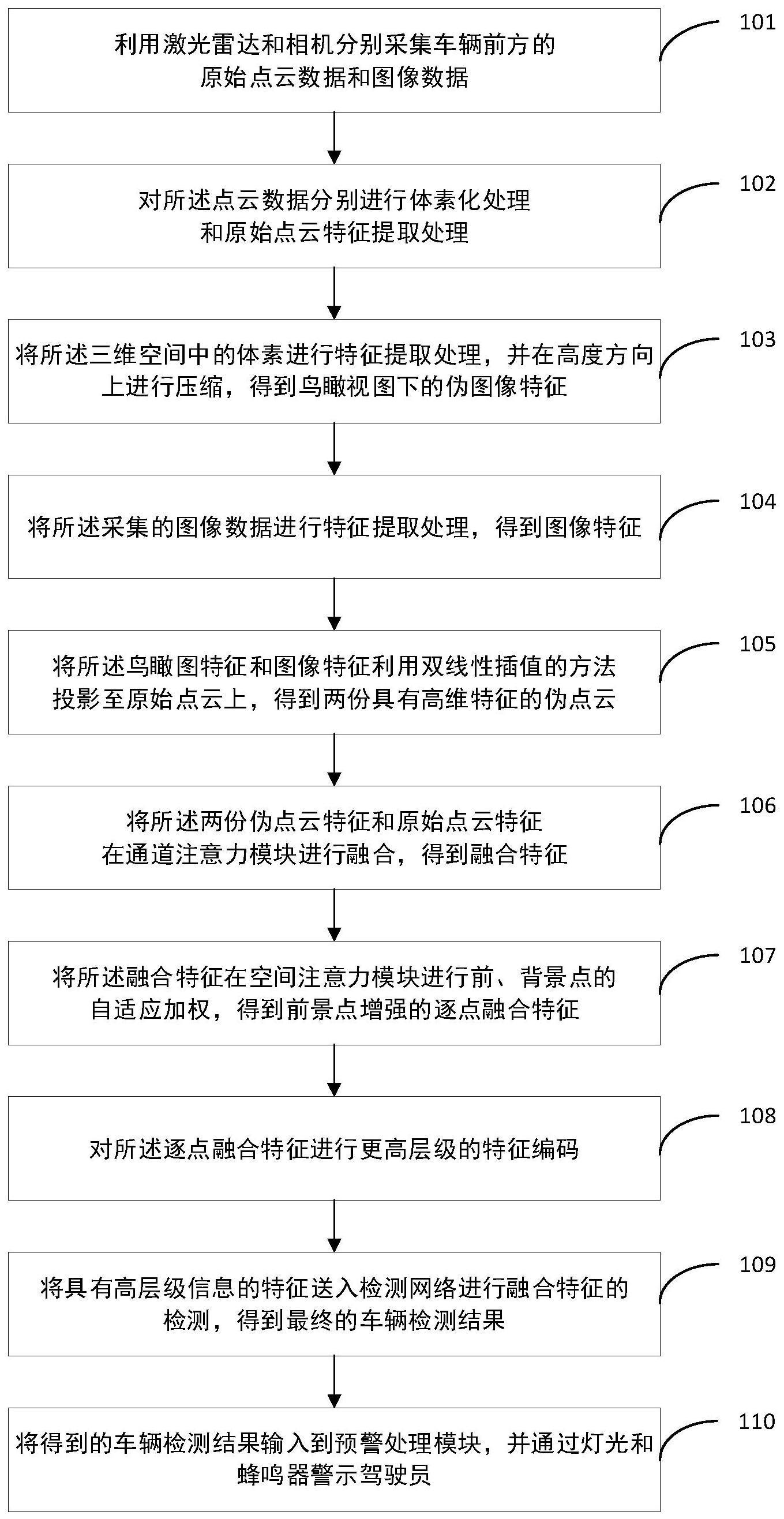
3、本发明提供的一种重型车辆智能防撞检测方法,包括如下步骤:s1、利用激光雷达和相机分别采集车辆前方的原始点云数据和图像数据;s2、对所述点云数据分别进行体素化处理和原始点云特征提取处理;s3、将步骤s2中得到的三维空间中的体素进行特征提取处理,并在高度方向上进行压缩,得到鸟瞰视图下的伪图像特征;s4、对步骤s1中获取的图像数据进行特征提取处理,得到图像特征;s5、将所述鸟瞰图特征和图像特征利用双线性插值的方法投影至原始点云上,得到两份具有高维特征的伪点云;s6、将所述两份伪点云特征和原始点云特征在通道注意力模块进行融合,得到融合特征;s7、将所述融合特征在空间注意力模块进行前景点、背景点的自适应加权,得到前景点增强的逐点融合特征;s8、将所述逐点融合特征进行更高层级的特征编码;s9、将具有高层级信息的特征送入检测网络进行融合特征的检测,得到最终的车辆检测结果,以便及时告知驾驶员碰撞风险。
4、在上述技术方案中,所述步骤s2的具体过程如下:s21、对点云的范围进行裁剪,设置体素单元的长宽高尺寸[lvoxel,wvoxel,hvoxel],分别沿点云坐标系中的x、y、z轴进行划分,得到若干个体素;s22、将原始点云送入到简单的多层感知机进行特征编码,得到原始点云特征。
5、在上述技术方案中,所述步骤s3的具体过程如下:s31、针对体素内包含数量不一的原始点,进行求平均值处理,从而完成体素的特征编码;s32、采用3d稀疏卷积的方式对经过特征编码得到的体素进行特征提取,依次对体素特征包含的四个卷积块进行1×、2×、4×、8×的下采样处理,得到下采样8倍之后的三维特征图;s33、将经过3d稀疏卷积后的三维特征图在高度方向上进行压缩叠加,得到鸟瞰视图下的伪图像特征。
6、在上述技术方案中,所述步骤s4的具体特征如下:对图像进行特征提取的网络为轻量级的densenet,所述轻量级的densenet包含一个输入处理层、两个denseblock模块和一个transition层;其中,输入处理层包含2d卷积核池化操作;denseblock是稠密连接模块,包含两次批归一化、两次激活变换和两次卷积处理;transition层是连接两个denseblock的过渡层,降低特征图的大小。
7、在上述技术方案中,所述步骤s5的具体过程如下:s51、建立原始点云与鸟瞰视角特征图fbev、相机视角特征图fcv之间的对应关系,分别用转换矩阵mbev和mcv来表示激光雷达原始点云与鸟瞰视角特征图、相机视角特征图之间的映射关系,假设点云中某个点pi(xi,yi,zi),可以根据以下公式获得点云中某个点在相应特征图中的位置pi'(xi',yi'):s52、采用双线性插值的方法来获得所需的点特征,其中的计算公式如下:其中,q11、q12、q21、q22是已知特征图上点的坐标以及对应的特征值。
8、在上述技术方案中,所述步骤s6的具体过程如下:s61、将鸟瞰视图逐点特征、相机视图逐点特征和原始点特征在通道上进行拼接,获得扩展之后的逐点特征;s62、将扩展之后的特征分别送入到三个通道注意力模块,每个通道注意力模块都利用相同的扩展点特征在通道维度进行自适应地计算各自通道维度特征的重要程度;s63、通过sigmoid函数得到各自的特征通道权重,并将权重与各自的逐点特征逐元素点乘获得注意力特征,计算公式如下:其中,fcat表示将鸟瞰视图逐点特征fbev-p、相机视图逐点特征fcv-p和原始点特征fraw-p在通道维度拼接之后的扩展特征,表示逐元素点乘运算符;s64、将各个视图的注意力特征在通道维度进行拼接,得到经通道注意力融合之后的特征ffusion-p,其中每个通道注意力模块的计算公式如下:mc(f)=σ(mlp(maxpool(f))+mlp(avgpool(f))),其中,f为输入特征,mc为通道注意力输出特征图,maxpool表示全局最大池化操作,avgpool表示全局平均池化操作,mlp表示参数共享的全连接层,σ表示sigmoid激活函数。
9、在上述技术方案中,所述步骤s7的具体过程如下:所述空间注意力模块对前景点和背景点的特征进行区分,计算公式如下:其中,ms为空间注意力输出特征图,maxpool表示全局最大池化操作,avgpool表示全局平均池化操作,linear表示线性变换处理,σ表示sigmoid激活函数,⊕表示特征拼接操作。
10、在上述技术方案中,还包括步骤s10、将得到的车辆检测结果输入到预警处理模块,并通过预警装置警示驾驶员。
11、本发明还公开了一种重型车辆智能防撞检测系统,其内存储有可被处理器执行的计算机程序,所述计算机程序能够用于执行重型车辆智能防撞检测方法。
12、本发明产生的有益效果是:通过将激光雷达和相机进行数据级的融合,得到更准确、更丰富的前方障碍物信息,弥补了单传感器误报、虚报率高和实时性差的缺陷,一定程度上解决了单一传感器很难满足智能驾驶全天候、多信息、高精度、高鲁棒性的环境感知要求的问题。另外,基于深度神经网络快速的障碍物检测,也能让驾驶员有更多的反应时间,从而使得重型车辆的防撞制动过程更安全可靠,降低了碰撞事故发生的风险。
- 还没有人留言评论。精彩留言会获得点赞!