货车车厢体积自动测量方法、装置、智能终端及存储介质与流程
本发明涉及自动测量,尤其涉及的是一种货车车厢体积自动测量方法、装置、智能终端及存储介质。
背景技术:
1、物流运输时,在高速公路收费站需要对货车车厢体积进行自动测量以根据车厢体积的不同收取不同的费用。
2、目前自动测量货车车厢体积大都采用光电体积测量系统,需要同时使用扫描仪、摄像机和传感器等设备,通过采集货车车厢的点云数据实现货车车厢的三维重建,从而求出货车车厢的体积。计算复杂、效率较低。
3、因此,现有技术还有待改进和提高。
技术实现思路
1、本发明的主要目的在于提供一种货车车厢体积自动测量方法、装置、存储介质及扫地机,旨在解决现有技术中自动测量货车车厢体积时计算复杂、效率较低的问题。
2、为了实现上述目的,本发明第一方面提供一种货车车厢体积自动测量方法,其中,所述方法包括:获取货车车厢的三维点云数据和二维图像数据;基于所述二维图像数据,获得货车车厢的车厢关键点和所述车厢关键点的图像坐标,所述车厢关键点为所述货车车厢的顶点且所有的所述车厢关键点至少构成三个相互正交的向量;基于世界坐标系和图像坐标系的映射关系、预设相机内参参数、所述车厢关键点的图像坐标及世界坐标,构建第一约束方程;基于所述向量之间的正交关系及所述车厢关键点的世界坐标,构建第二约束方程;根据所述三维点云数据获得货车车厢在世界坐标系任一维度上的尺寸,利用所述尺寸和位于所述维度上的车厢关键点的世界坐标构建第三约束方程;求解所述第一约束方程、所述第二约束方程和所述第三约束方程,获得所述车厢关键点的世界坐标,根据所述车厢关键点的世界坐标计算货车车厢的体积。
3、本发明第二方面提供一种货车车厢体积自动测量装置,所述装置包括:数据获取模块,用于获取货车车厢的三维点云数据和二维图像数据;车厢关键点模块,用于基于所述二维图像数据,获得货车车厢的车厢关键点和所述车厢关键点的图像坐标,所述车厢关键点为所述货车车厢的顶点且所有的所述车厢关键点至少构成三个相互正交的向量;第一约束方程模块,用于基于世界坐标系和图像坐标系的映射关系、预设相机内参参数、所述车厢关键点的图像坐标及世界坐标,构建第一约束方程;第二约束方程模块,用于基于所述向量之间的正交关系及所述车厢关键点的世界坐标,构建第二约束方程;第三约束方程模块,用于根据所述三维点云数据获得货车车厢在世界坐标系任一维度上的尺寸,利用所述尺寸和位于所述维度上的车厢关键点的世界坐标构建第三约束方程;体积计算模块,用于求解所述第一约束方程、所述第二约束方程和所述第三约束方程获得所述车厢关键点的世界坐标,根据所述车厢关键点的世界坐标计算货车车厢的体积。
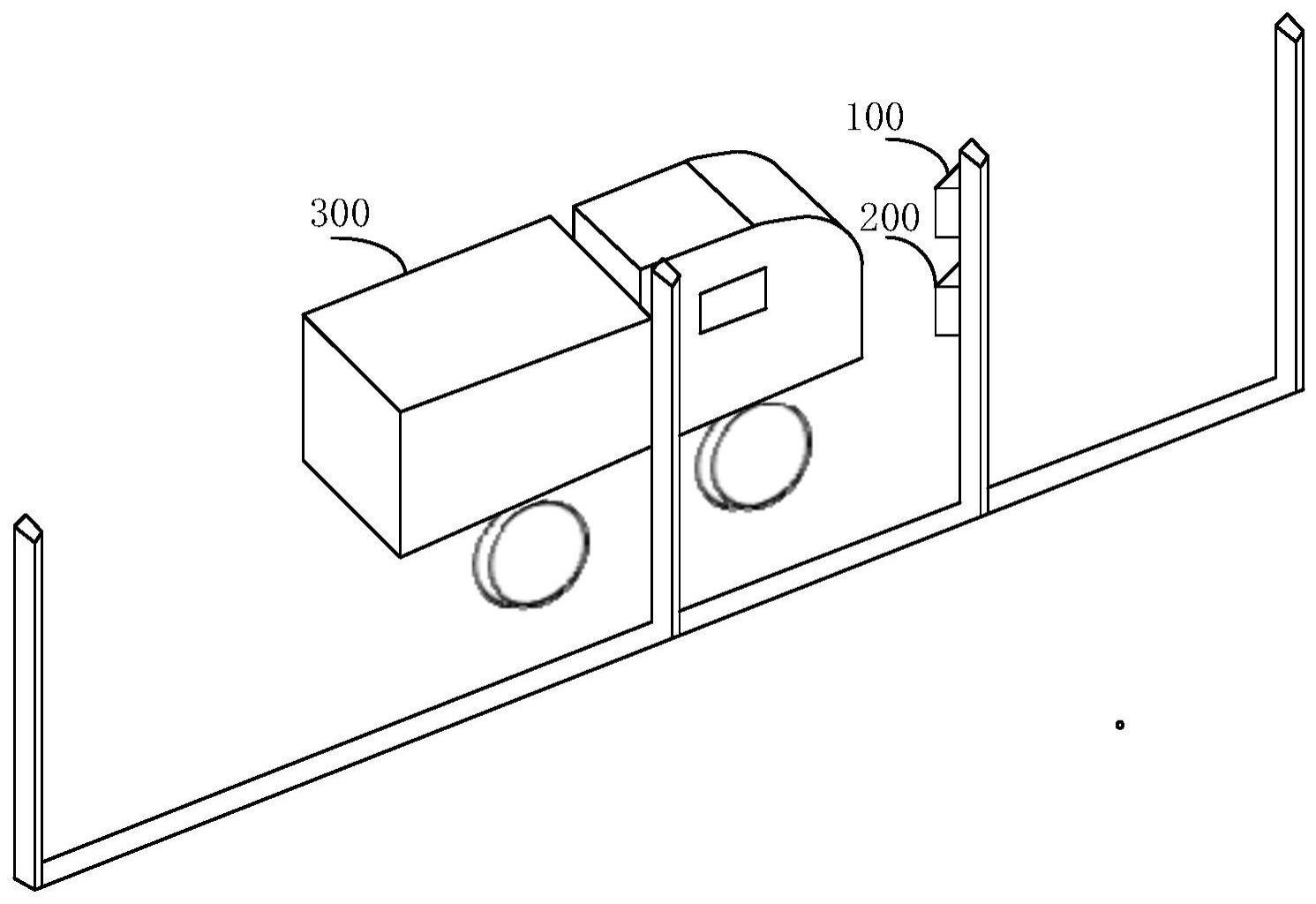
4、本发明第三方面提供一种货车车厢体积自动测量系统,包括线扫描仪、相机及处理器,其中,所述线扫描仪用于采集货车车厢的三维点云数据;所述相机用于采集货车车厢的二维图像数据;所述处理器根据任意一项上述货车车厢体积自动测量方法对所述三维点云数据和所述二维图像数据进行处理得到所述货车车厢的体积。
5、本发明第四方面提供一种智能终端,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的货车车厢体积自动测量程序,所述货车车厢体积自动测量程序被所述处理器执行时实现任意一项上述货车车厢体积自动测量方法的步骤。
6、本发明第五方面提供一种计算机可读存储介质,所述计算机可读存储介质上存储有货车车厢体积自动测量程序,所述货车车厢体积自动测量程序被处理器执行时实现任意一项上述货车车厢体积自动测量方法的步骤。
7、由上可见,本发明方案根据货车车厢的图像数据确定至少构成三个相互正交向量的车厢关键点,根据世界坐标系和图像坐标系的映射关系确定车厢关键点对应的第一约束方程,根据车厢关键点构成的向量的正交关系确定第二约束方程,根据货车车厢的点云数据确定第三约束方程,求解第一约束方程、第二约束方程和第三约束方程,获得车厢关键点的世界坐标,从而计算出货车车厢的体积。与现有技术相比,通过求解方程来计算货车车厢的体积,计算简单方便、效率高。
技术特征:
1.一种货车车厢体积自动测量方法,其特征在于,包括:
2.如权利要求1所述的货车车厢体积自动测量方法,其特征在于,获取货车车厢的二维图像数据之后,还包括:
3.如权利要求1所述的货车车厢体积自动测量方法,其特征在于,在所述获取货车车厢的三维点云数据和二维图像数据之前,包括预先对用于拍摄货车车厢的相机进行标定,获得所述预设相机内参参数和预设相机畸变参数;在获取货车车厢的二维图像数据之后,还包括根据所述预设相机内参参数和所述预设相机畸变参数,对所述二维图像数据进行畸变矫正。
4.如权利要求1所述的货车车厢体积自动测量方法,其特征在于,所述根据所述点云数据获得货车车厢在世界坐标系任一维度上的尺寸,包括:
5.如权利要求1所述的货车车厢体积自动测量方法,其特征在于,将用于拍摄货车车厢的相机的光心点设为世界坐标系的坐标原点以使世界坐标系和相机坐标系重合。
6.如权利要求5所述的货车车厢体积自动测量方法,其特征在于,所述车厢关键点的第一约束方程的表达式为:
7.一种货车车厢体积自动测量装置,其特征在于,所述装置包括:
8.一种货车车厢体积自动测量系统,其特征在于,包括线扫描仪、相机及处理器,其中,所述线扫描仪用于采集货车车厢的三维点云数据;所述相机用于采集货车车厢的二维图像数据;所述处理器根据权利要求1-6任意一项所述货车车厢体积自动测量方法对所述三维点云数据和所述二维图像数据进行处理得到所述货车车厢的体积。
9.一种智能终端,其特征在于,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的货车车厢体积自动测量程序,所述货车车厢体积自动测量程序被所述处理器执行时实现如权利要求1-6任意一项所述货车车厢体积自动测量方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有货车车厢体积自动测量程序,所述货车车厢体积自动测量程序被处理器执行时实现如权利要求1-6任意一项所述货车车厢体积自动测量方法的步骤。
技术总结
本发明公开了一种货车车厢体积自动测量方法、装置、智能终端及存储介质,根据货车车厢的图像数据确定至少构成三个相互正交向量的车厢关键点,根据世界坐标系和图像坐标系的映射关系确定车厢关键点对应的第一约束方程,根据车厢关键点构成的向量的正交关系确定第二约束方程,根据货车车厢的点云数据确定第三约束方程,求解第一约束方程、第二约束方程和第三约束方程,获得车厢关键点的世界坐标,从而计算出货车车厢的体积。与现有技术相比,通过求解方程来计算货车车厢的体积,计算简单方便、效率高。
技术研发人员:钱贝贝,辛冠希
受保护的技术使用者:奥比中光科技集团股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!