基于三维计算机视觉的建筑结构有限元智能逆向建模与分析系统的制作方法
本发明涉及一种基于三维计算机视觉的建筑结构有限元智能逆向建模与分析系统。
背景技术:
1、对于既有结构在几十年或者上百年的使用期限内,无论是结构材料的几何性能退化,还是结构构件的疲劳锈蚀,均不可避免的对结构造成损伤,同时社会的快速发展又给既有结构带来了超出原本设计承载力的荷载。因此,为保证结构的安全运行,便需要对结构进行定时的检查和评估,具体包括结构前期的损伤检查和后期的承载能力评估。
2、现阶段,在结构的前期检查过程中,常采用基于图像的损伤识别方法,该方法存在损伤尺寸(尤其是深度)难以量化,损伤位置不够准确等问题;在结构的后期评估过程中,常根据结构设计图纸人工建立其有限元模型开展有限元精细化分析,该方法存在设计图纸缺失,人工建模耗时长等问题。
技术实现思路
1、本发明的目的在于提供一种基于三维计算机视觉的建筑结构有限元智能逆向建模与分析系统。
2、为解决上述问题,本发明提供一种基于三维计算机视觉的建筑结构有限元智能逆向建模与分析系统,包括:
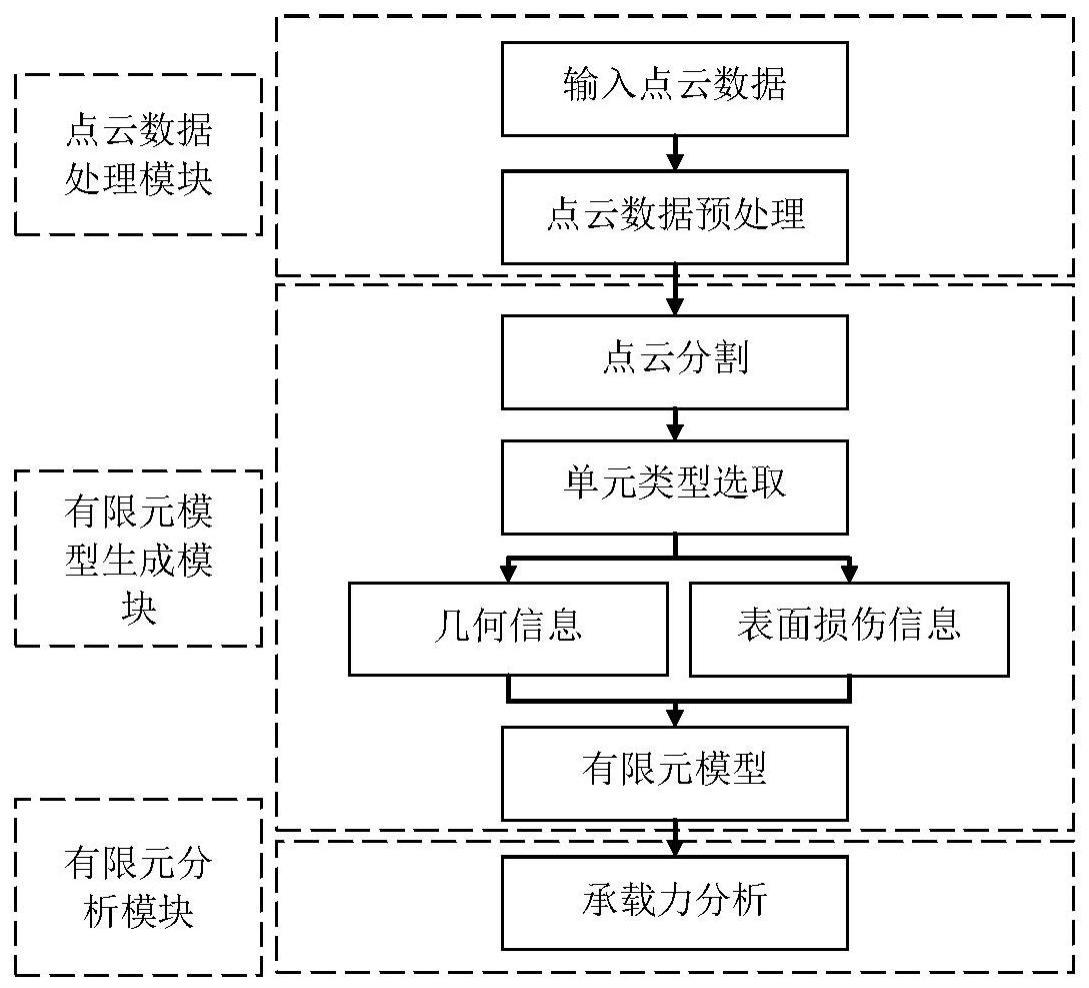
3、点云数据处理模块,用于对既有结构的点云数据处理,接收三维激光扫描仪采集的既有结构的点云数据,并对原始点云数据进行预处理,以得到处理好的点云数据,将处理好的点云数据输入至有限元模型生成模块;
4、有限元模型生成模块,接收点云数据处理模块传输的处理好的点云数据,采用超体聚类算法自动对点云数据中的结构的各个构件进行分割,将各个构件的点云转换到局部坐标系中;根据各构件的形状特征,选择相应的单元类型;采用基于切片的方法,对结构的每一个切片进行拟合,从而得到结构的几何参数;将点云中的颜色进行灰度化,基于点云的颜色特征,自适应提取损伤区域的点,得到损伤区域点云簇,并进行量化,得到相应的损伤参数;基于构件单元类型、几何参数与损伤参数,生成带有损伤的结构有限元模型,将生成的带有损伤的结构有限元模型输入至有限元分析模块;
5、有限元分析模块,用于对带有损伤的结构有限元模型划分网格、定义荷载及约束的条件,进行有限元分析,以得到既有结构在不同荷载和约束条件下的响应情况。
6、进一步的,在上述系统中,所述点云数据处理模块,包括:
7、点云数据输入单元,用于获取既有结构的点云数据,将既有结构的点云数据传输至点云数据预处理模块;
8、点云数据预处理单元,用于处理既有结构的点云数据,对点云数据进行点云滤波去噪和修补缺失点云,并将处理好的点云数据输出至有限元模型生成模块的点云聚类分割模块。
9、进一步的,在上述系统中,所述有限元模型生成模块,包括:
10、点云聚类分割单元,用于计算预处理后点云的法向量,基于法向量将点云映射到高斯球空间,再在高斯球空间中,分离并提取出不同方向一系列相互平行的点云平面,将不同方向一系列互相平行的点云平面设置为独立构件,将各个构件的点云转换到局部坐标系后输入至构件有限元单元类型选择单元;
11、构件有限元单元类型选择单元,用于根据输入的各构件的形状特征,选择相应的单元类型,并将各构件的点云数据和单元类型输入至有限元模型构建单元;
12、构件几何参数提取单元,用于在局部坐标系中,沿着结构的拉伸方向进行切片,并对每一个切片中的已经分割后的点云的各个表面进行三维平面拟合,然后以平面片的方式表示每一个切片的几何体,读取平面片的几何尺寸信息,最后将各构件的几何尺寸信息输入至有限元模型构建单元;
13、结构表面损伤识别与量化单元,用于对点云的颜色进行灰度化,然后基于点云的颜色特征,自适应提取点云中的裂缝,然后进行裂缝长度和宽度的量化计算,以到损伤参数;
14、有限元模型构建单元,用于根据构件有限元单元类型选择单元输入的单元类型、构件几何参数提取单元输入的几何尺寸信息、以及结构表面损伤识别与量化单元输入的损伤参数生成各构件的有限元模型,将局部坐标系下的各构件的有限元模型组合成整体结构,以生成既有结构的有限元模型,将有限元模型输入至有限元分析模块。
15、进一步的,在上述系统中,所述点云聚类分割单元,用于在高斯球空间中,采用dbscan聚类方法,分离出不同方向一系列相互平行的点云平面。
16、进一步的,在上述系统中,所述单元类型,包括:线单元、杆单元、梁单元、壳单元、板单元与实体单元。
17、进一步的,在上述系统中,所述单元类型,包括:线单元、杆单元、梁单元、壳单元、板单元与实体单元。
18、进一步的,在上述系统中,所述点云中的裂缝的提取,经过灰度化、滤波、自适应分割和真实裂缝筛选。
19、进一步的,在上述系统中,所述灰度化,包括:
20、将点云中的rgb颜色转换为灰度值;
21、所述滤波,包括:
22、遍历点云进行噪点过滤;
23、所述自适应分割,包括:
24、遍历点云中的每一个点pi,并使用knn算法搜索其半径r以内的近邻点集pr,通过比较点pi的灰度值和近邻点集pr的灰度平均值,选择灰度值g(pi)小于邻域灰度值的均值的点作为可能损伤点,提取损伤点云簇;
25、所述真实裂缝筛选,包括:
26、通过构建delaunay三角网并采用α-shape算法提取损伤点云簇的边界;最后,基于损伤区域边界,计算损伤参数,包括损伤宽度和深度差平均值,并根据材料残余强度与损伤大小的关系,设置损伤区域处单元的折减的材料属性,最后将材料属性输入至有限元模型构建单元。其中:损伤宽度和深度差平均值具体为:
27、①损伤宽度k:根据提取结果,计算损伤区域的宽度,(其中,x1、x2为损伤边界处的两端点云x轴坐标值,y1、y2为损伤边界处的两端点云y轴坐标值)。
28、②深度差平均值为损伤区域z轴方向数据与深度基准平面ax+by+cz+d=0之差的平均值,其中,n是损伤区域点云总数。
29、进一步的,在上述系统中,所述有限元分析模块,用于对输入的既有结构有限元模型根据实际受力情况进行承载力分析计算,包括:预设既有结构的荷载形式,分析类型和后处理的相关参数;对既有结构的有限元模型进行自适应网格划分,形成有限单元网格;选择结构的边界条件、自由度之间的耦合关系,将载荷施加到有限元模型上。
30、进一步的,在上述系统中,所述既有结构的荷载形式,包括:位移约束、集中力、表面载荷、体积载荷、惯性力和耦合场载荷;
31、所述分析类型,包括:静力分析、模态分析、谐响应分析、屈曲分析和动力分析;
32、所述有限元模型,包括:关键点、关键线、关键面、节点或单元。
33、与现有技术相比,本发明提出的基于三维计算机视觉的既有建筑结构有限元智能逆向建模与分析系统,首先,对三维激光扫描仪采集的既有结构的点云数据进行预处理;之后,采用dbscan聚类算法自动对处理好的结构点云数据分割成各个构件点云数据,建立各构件的局部坐标系将构件点云转换到局部坐标系中;接着,根据各构件的形状特征,选择相应的单元类型(包括线单元、杆单元、梁单元、壳单元、板单元与实体单元等);进一步的,采用基于切片的方法,对构件的每一个切片进行拟合,从而得到既有结构每个构件的几何参数;进一步的,将点云中的颜色进行灰度化,基于点云的颜色特征,自适应提取损伤区域的点,得到损伤区域点云簇,并进行量化,得到相应的损伤参数;进一步的,基于构件单元类型、几何参数与损伤参数,生成带有损伤的既有结构有限元模型;最后,对生成的既有结构有限元模型进行有限元分析,最终将得到既有结构在不同荷载、约束条件下的响应情况。至此,完成既有结构的检查和评估。
34、相比于传统既有结构检查与评估工作,本发明的有益效果主要有以下几点:
35、(1)可操作性、适用性强,仅需通过三维扫描的方法获得既有结构的点云数据便可完成预制构件的检测和评估工作,识别量化结构的表面损伤,并得到结构的承载力性能,解决了目前既有结构检查与评估工作需要人工建模所产生的主观性大等问题。
36、(2)提高既有结构有限元逆向建模与分析效率:实现既有结构的点云数据预处理,点云分割、有限元单元类型选择,结构几何参数提取,结构表面损伤识别与量化以及有限元模型自动化生成的自动化,解决了既有结构检查与评估方法所存在的效率低、耗时耗力等问题。
- 还没有人留言评论。精彩留言会获得点赞!