一种基于手势识别的设备控制方法及系统与流程
本发明涉及人工智能,尤其涉及一种基于手势识别的设备控制方法及系统。
背景技术:
1、目前,在通过手势识别完成相关设备控制(如通过手势控制空调、音响等车载设备)的技术方案中,容易对手势产生误判,例如在通过红外成像完成手势识别的过程中,将人体的头部误判为拳头等,进一步的,由于存在手势动作误判,因此无法准确完成对设备的控制,使得操作体验不佳,严重的会引发安全隐患,例如在车辆行驶过程中,若因手势误判导致误触某些设备,则可能导致驾驶员注意力无法集中到车辆驾驶上,造成行车安全隐患。
技术实现思路
1、本发明的目的在于提供一种基于手势识别的设备控制方法及系统,其可避免因不同手势或者无手势产生的系统误判,且可以保证即使有少量帧图片未检测到手势,也不影响手势动作识别,由此可提高设备控制灵敏度,同时还可以过滤掉不完整的手势动作,减少误触发。
2、为实现上述目的,本发明提供如下技术方案:
3、一方面,提供了一种基于手势识别的设备控制方法,其包括如下步骤:
4、从实时视频流中获取第k帧图像,并将其与所述标准手势图像数据库进行对比,以获得手势识别结果;
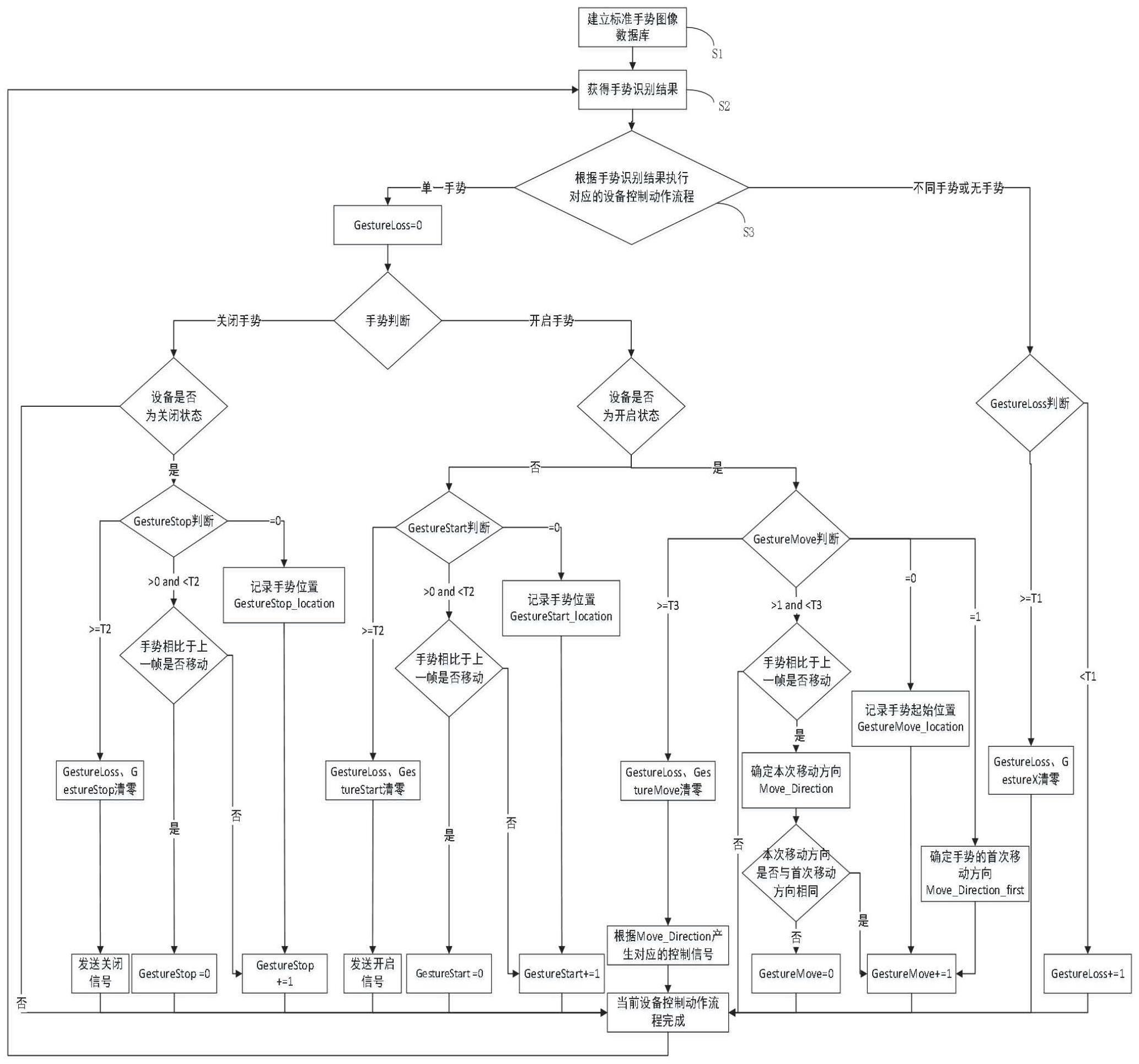
5、根据所述手势识别结果对当前手势连续丢失图像帧数gestureloss和/或与不同手势对应的动作类别变量gesturex进行更新,且执行对应的设备控制动作流程;其中,所述手势连续丢失图像帧数gestureloss为连续未识别出手势的图像帧数或连续未识别出相同手势类别的图像帧数。
6、优选的,根据所述手势识别结果对当前手势连续丢失图像帧数gestureloss和/或与不同手势对应的动作类别变量gesturex进行更新,且执行对应的设备控制动作流程,包括如下步骤:
7、若手势识别结果认为第k帧图像中包含不同的手势动作,或不包括任何手势动作,则判断当前手势连续丢失图像帧数gestureloss是否大于或等于第一阈值t1;
8、若当前手势连续丢失图像帧数gestureloss≥第一阈值t1,则对手势连续丢失图像帧数gestureloss、所有动作类别变量gesturex均进行清零,且设备工作状态不发生改变;
9、若当前手势连续丢失图像帧数gestureloss<第一阈值t1,则对当前手势连续丢失图像帧数gestureloss加1,且设备工作状态不发生改变。
10、优选的,根据所述手势识别结果对当前手势连续丢失图像帧数gestureloss和/或与不同手势对应的动作类别变量gesturex进行更新,且执行对应的设备控制动作流程,包括如下步骤:
11、若手势识别结果认为第k帧图像中包含单一手势动作,则将当前手势连续丢失图像帧数gestureloss清零,并根据该单一手势动作的类别执行对应的设备控制动作流程。
12、优选的,根据该单一手势动作的类别执行对应的设备控制动作流程,包括如下步骤:
13、若当前手势对应的动作类别变量gesturex=0,则记录当前手势所在图像的中心位置gesture_location,并将动作类别变量gesturex加1,且不产生设备控制信号。
14、优选的,根据该单一手势动作的类别执行对应的设备控制动作流程,包括如下步骤:
15、若0<当前手势对应的动作类别变量gesturex<第二阈值t2,则判断当前手势相对于上一帧图像是否发生移动;
16、若认为当前手势未发生移动,且将gesturex加1,不产生设备控制信号;
17、若认为当前手势发生移动,且当前手势的出现并非为设备功能触发动作的一部分,此时将gesturex清零,不产生设备控制信号。
18、优选的,根据该单一手势动作的类别执行对应的设备控制动作流程,包括如下步骤:
19、若当前手势对应的动作类别变量gesturex≥第二阈值t2,则对手势连续丢失图像帧数gestureloss、所有动作类别变量gesturex均进行清零,并产生设备控制信号,使得设备根据该设备控制信号完成工作状态的切换。
20、优选的,所述工作状态的切换通过对离散变量的控制来实现。
21、优选的,根据该单一手势动作的类别执行对应的设备控制动作流程,包括如下步骤:
22、设备已进入开启状态后,根据是否出现移动手势完成对设备工作状态的切换。
23、优选的,设备已进入开启状态后,根据是否出现移动手势完成对设备工作状态的切换包括如下步骤:
24、若识别出的当前手势对应的动作类别变量gesturemove=0,则记录当前手势起始位置gesturemove_location,且将gesturemove加1,不产生设备控制信号。
25、优选的,设备已进入开启状态后,根据是否出现移动手势完成对设备工作状态的切换包括如下步骤:
26、若识别出的当前手势对应的动作类别变量gesturemove=1,则获取当前手势所在图像的中心位置,并通过其与动作类别变量gesturemove=0时手势所在图像的中心位置gesturemove_location确定当前手势的首次移动方向move_direction_first,且将gesturemove加1,不产生设备控制信号。
27、优选的,设备已进入开启状态后,根据是否出现移动手势完成对设备工作状态的切换包括如下步骤:
28、若1<识别出的当前手势对应的动作类别变量gesturemove<第三阈值t3,则判断当前手势相对于上一帧图像是否发生移动;
29、若认为当前手势未发生移动,则不产生设备控制信号;
30、若认为当前手势发生移动,则将当前手势的再次移动方向move_direction与首次移动方向move_direction_first进行对比;
31、若当前手势的再次移动路径与首次移动路径之间所成的夹角为0±20°,则将gesturemove加1,不产生设备控制信号;若当前手势的再次移动方向与基准移动方向move_direction不一致,则对gesturemove清零,不产生设备控制信号。
32、优选的,设备已进入开启状态后,根据是否出现移动手势完成对设备工作状态的切换包括如下步骤:
33、若识别出的当前手势对应的动作类别变量gesturemove≥第三阈值t3,则对动作类别变量gesturemove进行清零,并产生设备控制信号,使得设备根据所述设备控制信号完成工作状态的切换。
34、优选的,所述工作状态的切换通过对连续变量的控制来实现。
35、另一方面,还提供了一种用于实现上述设备控制方法的设备控制系统,其包括:
36、数据库,其用于存储不同的标准手势图像;
37、成像设备,其用于获取实时视频流;
38、手势识别单元,其用于从实时视频流中获取某一帧图像,并将其与所述标准手势图像数据库进行对比,以获得手势识别结果;
39、以及设备控制单元,其用于根据所述手势识别结果执行对应的设备控制动作流程。
40、综上所述,本发明与现有技术相比具有以下有益效果:
41、本发明可通过手势连续丢失图像帧数gestureloss、动作类别变量gesturex的赋值变化执行对应的设备动作控制流程,由此可避免因不同手势或者无手势产生的系统误判,且可以保证即使有少量帧图片未检测到手势,也不影响手势动作识别,由此可提高设备控制灵敏度,同时还可以过滤掉不完整的手势动作,减少误触发。
- 还没有人留言评论。精彩留言会获得点赞!