一种带电作业工器具维护系统及带电作业工器具维护方法与流程
本发明涉及带电作业工器具维护管理,尤其涉及一种带电作业工器具维护系统及带电作业工器具维护方法。
背景技术:
1、带电作业工器具是开展带电作业的基础,根据行业及标准规范要求,工器具都定置定位存放在专用货架上,同时整个库房温度,湿度也控制在合理的范围内。除例行定期送检测试外,工器具也是需要开展定期例行常规维护和管理,确保工器具状态,降低安全事故发生。
2、常规带电作业工器具库房建设中,通常配置在库房一个角落配置一个工器具检测台,将待维护的工器具搬运到操作台上进线操作。但随着带电作业业务持续开展,带电作业工器具库房越来越大,比如对于350平米的库房,存放有近2000件工器具,常规方式做例行工器具维护工作,会极其繁琐。
3、现有技术中,虽然有发明便携式移动护理小车,但仍然以操作人员为核心开展作业,通过推车方式到库房货架旁边对工器具进行维护操作,虽然带来一定的方便,但是其缺少有效的指导和规划,容易出现对于工器具例行维护不够全面、无法照顾到所有工器具的问题。
技术实现思路
1、有鉴于此,有必要提供一种带电作业工器具维护系统及带电作业工器具维护方法,用以解决现有技术中对于工器具例行维护不够全面、无法照顾到所有工器具的问题。
2、为达到上述技术目的,本发明采取了以下技术方案:
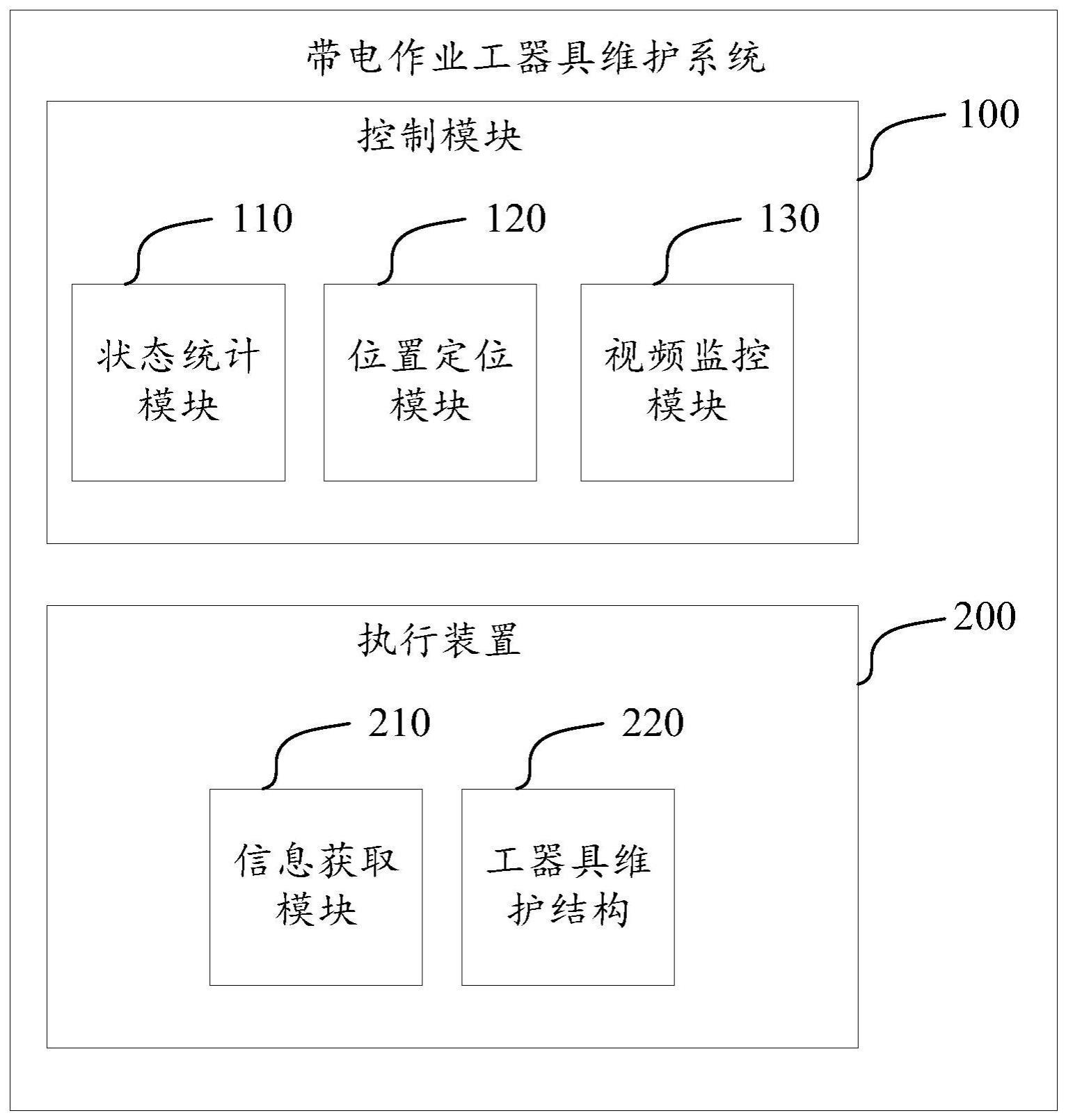
3、第一方面,本发明提供了一种带电作业工器具维护系统,包括控制模块和执行装置;所述控制模块包括状态统计模块、位置定位模块和视频监控模块,所述执行装置包括信息获取模块和工器具维护结构,其中:
4、所述状态统计模块用于获取多个工器具的实时状态信息,并根据所述实时状态信息得到所述工器具的维护信息;
5、所述位置定位模块用于获取所述执行装置的位置信息;
6、所述视频监控模块用于获取所述工器具的存放位置信息,并根据所述存放位置信息得到所述工器具的实时监控图像;
7、所述信息获取模块用于根据所述位置信息和所述存放位置信息生成维护指令,以控制所述工器具维护结构移动至所述工器具的存放位置,并根据所述维护信息和所述实时监控图像,对所述工器具进行维护。
8、进一步的,所述工器具维护结构包括车体、所述信息获取模块包括主控器、供电电源、微型打印机、网络通讯卡、触控显示器和库房内定位模块,其中所述主控器、所述供电电源、所述微型打印机、所述网络通讯卡、所述触控显示器和所述库房内定位模块均连接于所述车体,所述供电电源、所述微型打印机、所述网络通讯卡、所述触控显示器和所述库房内定位模块均电连接于所述主控器,所述库房内定位模块用于向所述位置定位模块发出所述位置信息。
9、进一步的,还包括多个身份信息标签,多个所述身份信息标签分别和每个所述工器具一一对应地连接,所述信息获取模块还包括标签信息读写器,所述标签信息读写器连接于所述车体并电连接所述主控器。
10、进一步的,所述供电电源包括微型逆变器、便携锂电池组和电池充电管理器,所述微型逆变器电连接所述便携锂电池组,所述便携锂电池组电连接所述主控器和所述电池充电管理器。
11、进一步的,所述位置定位模块包括至少三个定位基站,至少三个所述定位基站分别设置于存放所述工器具的库房内的不同位置,所述视频监控模块包括多个可调摄像装置,多个所述可调摄像装置均设置于存放所述工器具的库房内。
12、第二方面,本发明还提供了一种带电作业工器具维护方法,应用于上述任一项所述的带电作业工器具维护系统,所述带电作业工器具维护方法包括:
13、获取多个工器具的实时状态信息,并根据所述实时状态信息得到所述工器具的维护信息;
14、获取所述执行装置的位置信息;
15、获取所述工器具的存放位置信息,并根据所述存放位置信息得到所述工器具的实时监控图像;
16、根据所述位置信息和所述存放位置信息生成维护指令,以控制所述工器具维护结构移动至所述工器具的存放位置,并根据所述维护信息和所述实时监控图像,对所述工器具进行维护。
17、进一步的,所述维护信息包括维护作业内容和维护顺序;所述获取多个工器具的实时状态信息,并根据所述实时状态信息得到所述工器具的维护信息,包括:
18、获取多个所述工器具的实时状态信息,得到每个所述工器具的维护作业内容;
19、根据所述维护作业内容,得到每个所述维护作业内容的紧迫性等级;
20、根据所述紧迫性等级,得到多个所述维护作业内容的维护顺序。
21、进一步的,所述根据所述位置信息和所述存放位置信息生成维护指令,以控制所述工器具维护结构移动至所述工器具的存放位置,并根据所述维护信息和所述实时监控图像,对所述工器具进行维护,包括:
22、根据所述位置信息,基于所述维护顺序,得到目标工器具;
23、根据所述位置信息和所述存放位置信息生成维护指令,以控制所述工器具维护结构移动至所述工器具的存放位置;
24、基于所述维护作业内容,结合所述实时监控图像,对所述目标工器具进行维护。
25、进一步的,所述根据所述位置信息和所述存放位置信息生成维护指令,以控制所述工器具维护结构移动至所述工器具的存放位置,并根据所述维护信息和所述实时监控图像,对所述工器具进行维护,还包括:
26、获取实际工器具的身份信息以及目标工器具的身份信息;
27、比对所述实际工器具的身份信息和所述目标工器具的身份信息。
28、进一步的,所述获取所述执行装置的位置信息,包括:
29、建立库房定位坐标系,并获取所述库房定位坐标系中的多个基准位置坐标;
30、获取所述信息获取模块发出的位置信号;
31、根据所述位置信号,得到所述执行装置至每个所述基准位置坐标的定位距离;
32、根据多个所述基准位置坐标和所述定位距离,基于所述库房定位坐标系,得到所述执行装置的位置信息。
33、本发明提供一种带电作业工器具维护系统及带电作业工器具维护方法,其中系统包括控制模块和执行装置,所述控制模块包括状态统计模块、位置定位模块和视频监控模块,所述执行装置包括信息获取模块和工器具维护结构,其先获取多个工器具的实时状态信息,并根据所述实时状态信息得到所述工器具的维护信息,然后获取所述执行装置的位置信息,再获取所述工器具的存放位置信息,并根据所述存放位置信息得到所述工器具的实时监控图像,最后根据所述位置信息和所述存放位置信息生成维护指令,以控制所述工器具维护结构移动至所述工器具的存放位置,并根据所述维护信息和所述实时监控图像,对所述工器具进行维护。相比于现有技术,本发明通过对每个工器具的实时状态信息进行统计以得到维护信息,再基于每个工器具的存放位置信息通过执行装置自动移动至需要维护的工器具的位置进行维护,同时配合实时监控图像可以全面掌握维护时的具体情况,使维护作业能够代替人为规划以覆盖所有的工器具,解决了现有技术中对于工器具例行维护不够全面、无法照顾到所有工器具的问题。
- 还没有人留言评论。精彩留言会获得点赞!