隧道围岩的超欠挖量检测方法及系统、存储介质和终端与流程
本发明涉及隧道检测,尤其涉及隧道围岩的超欠挖量检测方法及系统、存储介质和终端。
背景技术:
1、隧道的超欠挖指隧道在开挖过程中形成的隧道围岩的轮廓与设计的开挖轮廓之间的偏差。隧道围岩的轮廓在设计的开挖轮廓以外的部分称为超挖,在设计的开挖轮廓以内的部分称为欠挖。
2、在隧道的开挖过程中,超欠挖的现象普遍存在。超欠挖不仅增加了施工成本,而且会造成隧道围岩局部应力集中,影响隧道的整体稳定性。三维激光扫描技术是本世纪被发现的一项全新技术,该项技术被广泛应用于测绘中。它是利用激光测距的原理,通过记录被测物体表面大量的密集的点的三维坐标、反射率和纹理等信息,可快速复建出被测目标的三维模型及线、面、体等各种图件数据,该种技术具有独特的技术特性,目前在隧道勘测领域中被较为深入的研究。
3、然而,现有检测隧道超欠挖量的方法不能快速准确的确定隧道中超欠挖量的具体位置及超欠挖量的参数数据。
技术实现思路
1、为了解决上述技术问题,本发明提供了隧道围岩的超欠挖量检测方法及系统、存储介质和终端。
2、本发明采用以下技术方案:一种隧道围岩的超欠挖量检测方法,所述方法包括:
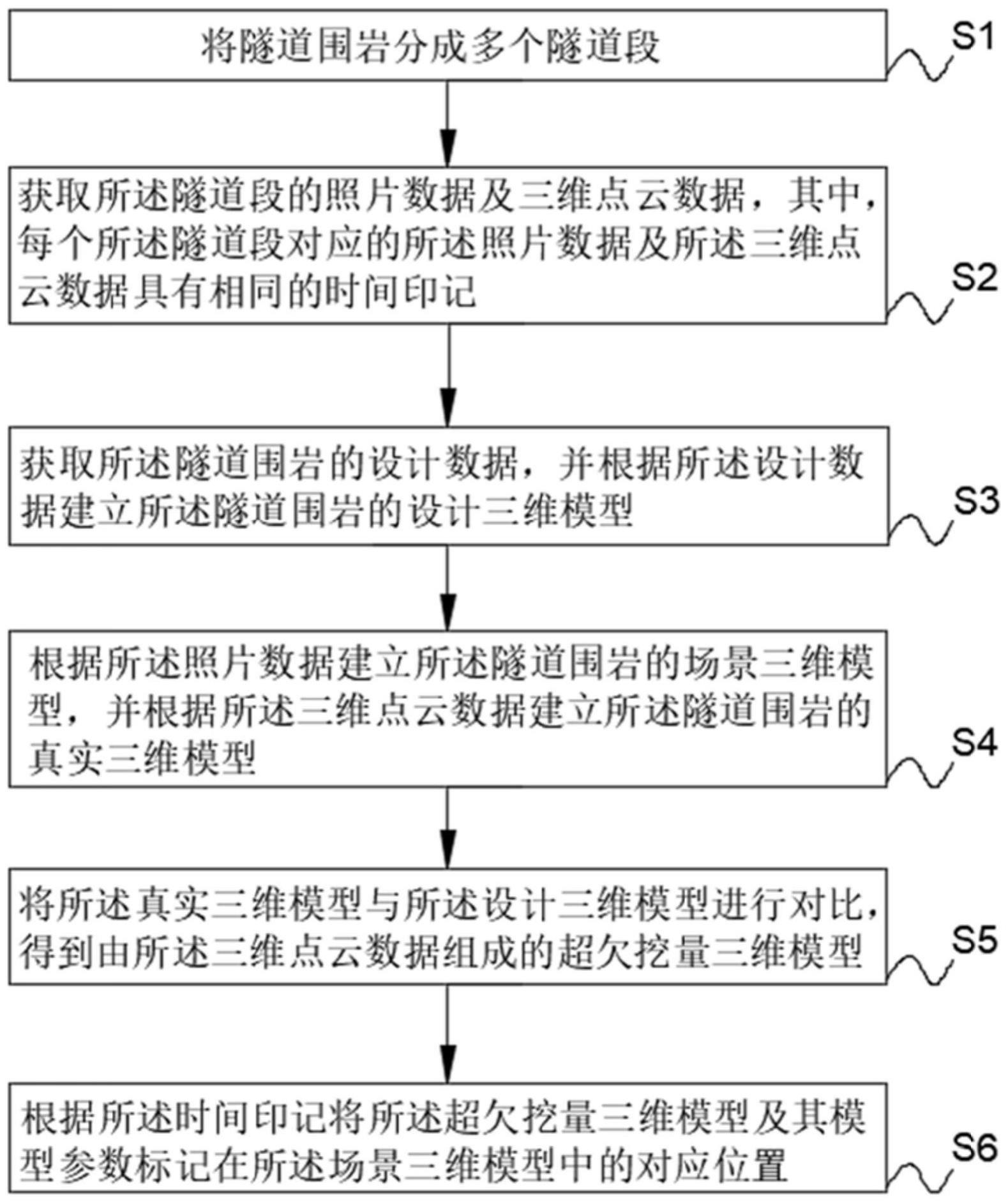
3、将隧道围岩分成多个隧道段;
4、获取所述隧道段的照片数据及三维点云数据,其中,每个所述隧道段对应的所述照片数据及所述三维点云数据具有相同的时间印记;
5、获取所述隧道围岩的设计数据,并根据所述设计数据建立所述隧道围岩的设计三维模型;
6、根据所述照片数据建立所述隧道围岩的场景三维模型,并根据所述三维点云数据建立所述隧道围岩的真实三维模型;
7、将所述真实三维模型与所述设计三维模型进行对比,得到由所述三维点云数据组成的超欠挖量三维模型;
8、根据所述时间印记将所述超欠挖量三维模型及其模型参数标记在所述场景三维模型中的对应位置。
9、本发明一实施例的隧道围岩的超欠挖量检测方法,根据照片数据可以确定场景三维模型,根据三维点云数据可以确定真实三维模型,根据设计数据可以确定隧道围岩的设计三维模型,通过分析比对真实三维模型和设计三维模型可以确定超欠挖量三维模型;由于超欠挖量三维模型是由真实三维模型和设计三维模型确定的,所以超欠挖量三维模型可以和真实三维模型相对应,而真实三维模型是由三维点云数据确定的,且三维点云数据及照片数据是与时间印记关联的,因此,超欠挖量三维模型可以通过时间印记与场景三维模型相对应,可以将超欠挖量三维模型及其模型参数标记在场景三维模型中的对应位置,这样,设计者在场景三维模型中可以快速准确的看到标记的超欠挖量三维模型及其模型参数,进而,可以快速准确的在隧道中定位出超欠挖区域的位置,而且能够对模型参数快速准确的对超欠挖区域进行分析判断,及时排查风险,有效提高了工作效率。
10、进一步的,获取所述隧道段的照片数据及三维点云数据的步骤具体包括:
11、s201:将多路拍照设备与三维激光扫描设备进行关联,使所述多路拍照设备与所述三维激光扫描设备在所述隧道段靠所述隧道围岩入口的一端同步启动;其中,所述多路拍照设备的拍照范围至少覆盖单个所述隧道段的范围,所述三维激光扫描设备的扫描范围至少覆盖单个所述隧道段的范围,所述多路拍照设备及所述三维激光扫描设备的初始位置为所述隧道围岩的入口处;
12、s202:启动所述多路拍照设备及所述三维激光扫描设备,开始静态拍照及静态扫描;
13、s203:将所述多路拍照设备或所述三维激光扫描设备启动时的时间戳作为所述时间印记,并使所述时间印记分别与在该所述隧道段内生成的所述照片数据及所述三维点云数据进行关联;
14、s204:当所述多路拍照设备及所述三维激光扫描设备在所述隧道段的一端分别完成静态拍照和静态扫描时,将所述多路拍照设备及所述三维激光扫描设备关闭,并将其移动至下一所述隧道段靠所述隧道围岩入口的一端处;
15、s205:重复上述s202至s204的步骤,得到与多个所述隧道段对应的多组所述照片数据及多组所述三维点云数据。
16、进一步的,根据所述照片数据建立所述隧道围岩的场景三维模型,并根据所述三维点云数据建立所述隧道围岩的真实三维模型的步骤具体包括:
17、将每组所述照片数据采用倾斜摄影技术建立与所述隧道段对应的隧道段场景三维模型;
18、将所述隧道段场景三维模型按照时间印记的次序进行拼接,得到与所述隧道围岩对应的所述场景三维模型;
19、根据差值法及均值法对所述三维点云数据进行降噪处理;
20、将经降噪处理后的每组所述三维点云数据采用delaunay三角网建模法建立与所述隧道段对应的隧道段真实三维模型;
21、将所述隧道段真实三维模型按照时间印记的次序进行拼接,得到与所述隧道围岩对应的所述真实三维模型。
22、进一步的,将所述真实三维模型与所述设计三维模型进行对比,得到由所述三维点云数据组成的超欠挖量三维模型的步骤具体包括:
23、将所述真实三维模型与所述设计三维模型共有的特征线或具有相同分布特征的点进行重合;
24、采用排差法对所述真实三维模型及所述设计三维模型进行预处理;
25、将经所述排差法预处理后的所述真实三维模型中与所述设计三维模型重叠的所述三维点云数据删除,所述真实三维模型中剩余的所述三维点云数据构成的模型为所述超欠挖量三维模型。
26、进一步的,所述排差法的步骤具体包括:
27、在所述真实三维模型的隧道中轴线上取多个间隔距离相同的排差点,将所述排差点沿所述真实三维模型的半径方向延伸,得到与所述真实三维模型相交的第一交点、与所述设计三维模型相交的第二交点;
28、计算所述第一交点与第二交点之间的交点距离,若所述交点距离大于预设的阈值距离,则将与所述第一交点对应的所述三维点云数据删除,将与所述第二交点对应的所述设计数据删除;
29、若所述交点距离小于等于预设的阈值距离,则将所述第一交点及所述第二交点保留。
30、进一步的,根据所述时间印记将所述超欠挖量三维模型及其参数标记在所述场景三维模型中的对应位置的步骤具体包括:
31、根据所述时间印记使所述超欠挖量三维模型与所述场景三维模型相对应;
32、获取所述超欠挖量三维模型的模型参数,其中,所述模型参数包括超欠挖量、超挖风险值及欠挖风险值;
33、将所述超欠挖量三维模型及所述模型参数以颜色标注或阴影标注的方法标记在所述场景三维模型对应的位置。
34、进一步的,获取所述超欠挖量三维模型的模型参数的步骤具体包括:
35、将所述超欠挖量三维模型进行逆转处理,得到所述真实三维模型与所述设计三维模型重合的模型;
36、获取所述真实三维模型与所述设计三维模型重合时的断面图,将所述断面图置于二维坐标系的第一象限,得到超欠挖量di:
37、
38、其中,(i,yi)为所述断面图中所述真实三维模型的断面轮廓上的第i点坐标,(k,yk)、(j,yj)分别是第i点与二维坐标系的原点相连时与所述设计三维模型的断面轮廓相交的第k点坐标及第j点坐标,第j点靠近二维坐标系原点;若所述超欠挖量di大于0表示该区域为超挖区域,若所述超欠挖量di小于0表示该区域为欠挖区域,若所述超欠挖量di等于0表示该区域为标准区域;
39、根据所述超欠挖量di得到所述超挖风险值fi及所述欠挖风险值ei:
40、
41、
42、其中,maxai为最大允许超挖值,maxai>|gi|,maxbi为最大允许欠挖值,maxbi>|gi|。
43、本发明还提出一种隧道围岩的超欠挖量检测系统,所述系统包括:
44、分段模块,用于将隧道围岩分成多个隧道段;
45、第一获取模块,用于获取所述隧道段的照片数据及三维点云数据,其中,每个所述隧道段对应的所述照片数据及所述三维点云数据具有相同的时间印记;
46、第二获取模块,用于获取所述隧道围岩的设计数据,并根据所述设计数据建立所述隧道围岩的设计三维模型;
47、建立模块,用于根据所述照片数据建立所述隧道围岩的场景三维模型,并根据所述三维点云数据建立所述隧道围岩的真实三维模型;
48、对比模块,用于将所述真实三维模型与所述设计三维模型进行对比,得到由所述三维点云数据组成的超欠挖量三维模型;
49、标记模块,用于根据所述时间印记将所述超欠挖量三维模型及其模型参数标记在所述场景三维模型中的对应位置。
50、本发明一实施例的隧道围岩的超欠挖量检测系统,根据照片数据可以确定场景三维模型,根据三维点云数据可以确定真实三维模型,根据设计数据可以确定隧道围岩的设计三维模型,通过分析比对真实三维模型和设计三维模型可以确定超欠挖量三维模型;由于超欠挖量三维模型是由真实三维模型和设计三维模型确定的,所以超欠挖量三维模型可以和真实三维模型相对应,而真实三维模型是由三维点云数据确定的,且三维点云数据及照片数据是与时间印记关联的,因此,超欠挖量三维模型可以通过时间印记与场景三维模型相对应,可以将超欠挖量三维模型及其模型参数标记在场景三维模型中的对应位置,这样,设计者在场景三维模型中可以快速准确的看到标记的超欠挖量三维模型及其模型参数,进而,可以快速准确的在隧道中定位出超欠挖区域的位置,而且能够对模型参数快速准确的对超欠挖区域进行分析判断,及时排查风险,有效提高了工作效率。
51、一种计算机可读存储介质,包括指令,当其在计算机上运行时,使得计算机执行上述的隧道围岩的超欠挖量检测方法。
52、一种终端,所述终端包括:处理器,存储器;所述处理器、所述存储器进行相互的通信;
53、所述存储器用于存储指令;
54、所述处理器用于执行所述存储器中的所述指令,执行上述的隧道围岩的超欠挖量检测方法。
- 还没有人留言评论。精彩留言会获得点赞!