橡胶本构模型参数的确定方法、装置、设备及存储介质与流程
本公开涉及材数据处理的,尤其涉及一种橡胶本构模型参数的确定方法、装置、设备及存储介质。
背景技术:
1、橡胶本构模型是一种描述橡胶材料力学性质的数学模型,电子设备壳体所用的橡胶属于高分子超弹性材料,在使用有限元软件abaqus对橡胶产品进行相关分析时,需要输入橡胶本构模型参数。该本构参数的获取通常需要万能材料试验机对目标橡胶材料做标准单轴拉伸实验,获取名义应力-应变曲线,在abaqus中输入该应力应变曲线,搭配不同的应变势能形式来拟合橡胶本构模型。
2、由于万能材料试验机设备昂贵,且需要配置大量程引伸计或光学引伸计来测量橡胶大变形过程的应变,使得橡胶单轴实验参数获取比较困难。
技术实现思路
1、本公开提供了一种橡胶本构模型参数的确定方法、装置、设备及存储介质,以至少解决现有技术中存在的本构模型参数的确定较难的技术问题。
2、根据本公开的第一方面,提供了一种橡胶本构模型参数的确定方法,所述方法包括:
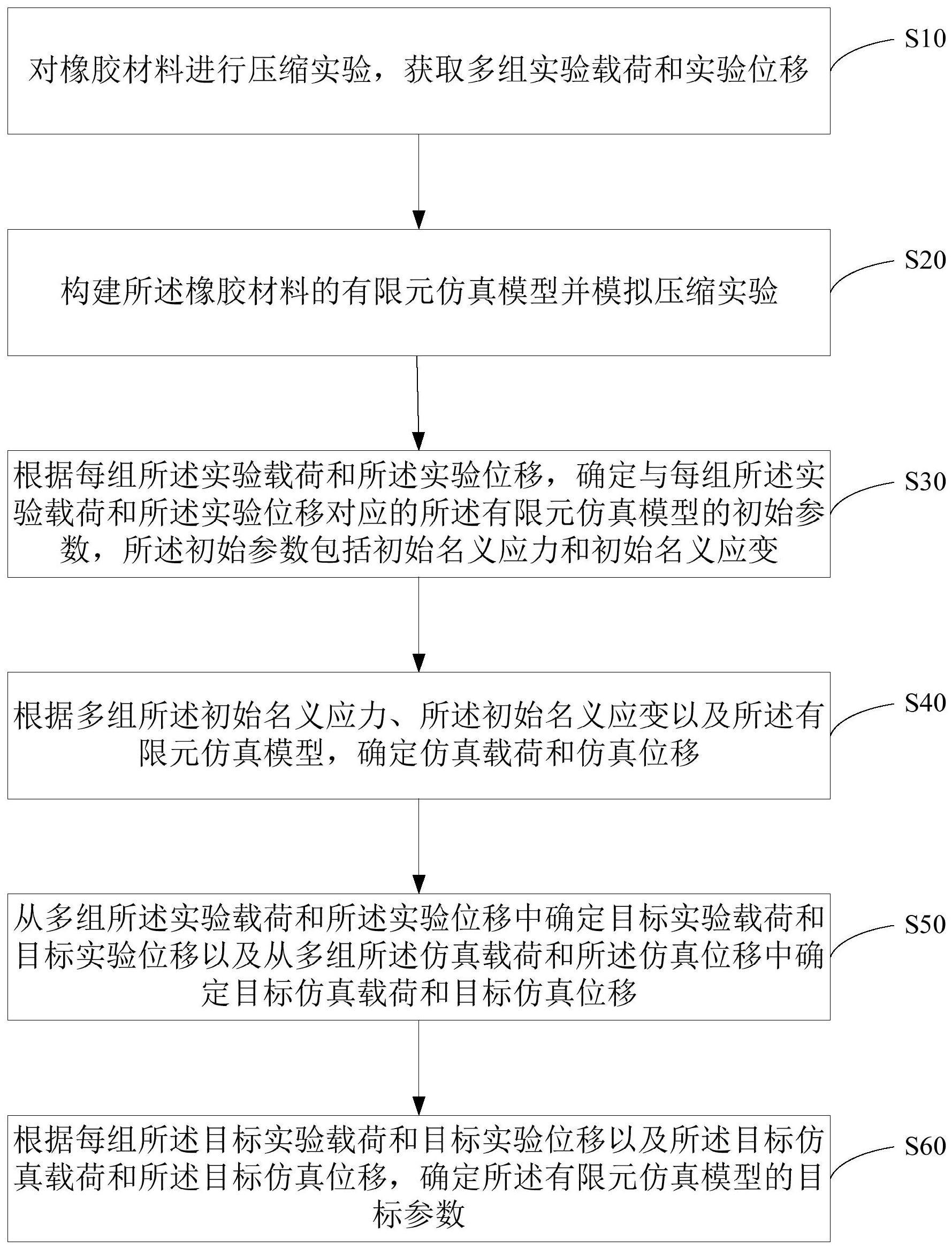
3、对橡胶材料进行压缩实验,获取多组实验载荷和实验位移;
4、构建所述橡胶材料的有限元仿真模型并模拟压缩实验;
5、根据每组所述实验载荷和所述实验位移,确定与每组所述实验载荷和所述实验位移对应的所述有限元仿真模型的初始参数,所述初始参数包括初始名义应力和初始名义应变;
6、根据多组所述初始名义应力、所述初始名义应变以及所述有限元仿真模型,确定仿真载荷和仿真位移;
7、从多组所述实验载荷和所述实验位移中确定目标实验载荷和目标实验位移以及从多组所述仿真载荷和所述仿真位移中确定目标仿真载荷和目标仿真位移;
8、根据每组所述目标实验载荷和目标实验位移以及所述目标仿真载荷和所述目标仿真位移,确定所述有限元仿真模型的目标参数。
9、在一可实施方式中,构建所述橡胶材料的有限元仿真模型,包括:
10、获取橡胶材料的初始尺寸,所述初始尺寸包括所述橡胶材料的横截面积和高度;
11、基于所述横截面积和所述高度,构建所述橡胶材料的有限元仿真模型。
12、在一可实施方式中,所述根据每组所述实验载荷和所述实验位移,确定与每组所述实验载荷和所述实验位移对应的所述有限元仿真模型的初始参数,包括:
13、根据所述实验载荷和所述横截面积,确定与所述实验载荷对应的初始名义应力;
14、根据所述实验位移和所述高度,确定与所述实验位移对应的初始名义应变。
15、在一可实施方式中,所述从多组所述实验载荷和所述实验位移中确定目标实验载荷和目标实验位移,包括:
16、根据所述初始名义应变和所述高度,确定所述橡胶材料的压缩位移;
17、从多组所述实验位移中确定与所述压缩位移最接近的位移作为目标实验位移,与所述目标实验位移对应的载荷作为目标实验载荷;或
18、根据所述初始名义应力和所述横截面积,确定所述橡胶材料的压缩载荷;
19、从多组所述实验载荷中确定与所述压缩载荷最接近的载荷作为目标实验载荷,与所述目标实验载荷对应的位移作为目标实验位移。
20、在一可实施方式中,所述从多组所述仿真载荷和所述仿真位移中确定目标仿真载荷和目标仿真位移,包括:
21、从多组所述仿真位移中确定与所述压缩位移最接近的位移作为目标仿真位移,与所述目标仿真位移对应的载荷作为目标仿真载荷;或
22、从多组所述仿真载荷中确定与所述压缩载荷最接近的载荷作为目标仿真载荷,与所述目标仿真载荷对应的位移作为目标仿真位移。
23、在一可实施方式中,所述根据每组所述目标实验载荷和目标实验位移以及所述目标仿真载荷和所述目标仿真位移,确定所述有限元仿真模型的目标参数,包括:
24、确定所述目标实验载荷与其对应的所述目标仿真载荷的差值;
25、若所述差值不满足阈值,则校正所述目标实验载荷和所述目标仿真载荷对应的初始名义应力,进行下一次迭代训练;
26、若所述差值满足阈值,则保留所述目标实验载荷和所述目标仿真载荷对应的初始名义应力,进行下一次迭代训练;
27、重复执行,直至每组所述目标实验载荷与其对应的所述目标仿真载荷的差值均满足阈值,则将最后一次迭代训练时的名义应力和名义应变作为目标参数。
28、在一可实施方式中,所述根据每组所述目标实验载荷和目标实验位移以及所述目标仿真载荷和所述目标仿真位移,确定所述有限元仿真模型的目标参数,包括:
29、确定所述目标实验位移与其对应的所述目标仿真位移的差值;
30、若所述差值不满足阈值,则校正所述目标实验位移和所述目标仿真位移对应的初始名义应变,进行下一次迭代训练;
31、若所述差值满足阈值,则保留所述目标实验位移和所述目标仿真位移对应的初始名义应变,进行下一次迭代训练;
32、重复执行,直至每组所述目标实验位移与其对应的所述目标仿真位移的差值均满足阈值,则将最后一次迭代训练时的名义应力和名义应变作为目标参数。
33、在一可实施方式中,校正所述目标实验载荷对应的初始名义应力,包括:
34、根据所述目标实验载荷对应的初始名义应力和所述阈值确定校正后的名义应力;
35、校正所述目标实验位移对应的初始名义应变,包括:
36、根据所述目标实验位移对应的初始名义应变和所述阈值确定校正后的名义应变。
37、根据本公开的第二方面,提供了一种橡胶本构模型参数的确定装置,所述装置包括:
38、获取模块,用于对橡胶材料进行压缩实验,获取多组实验载荷和实验位移;
39、构建模块,用于构建所述橡胶材料的有限元仿真模型并模拟压缩实验;
40、初始参数确定模块,用于根据每组所述实验载荷和所述实验位移,确定与每组所述实验载荷和所述实验位移对应的所述有限元仿真模型的初始参数,所述初始参数包括初始名义应力和初始名义应变;
41、仿真数据确定模块,用于根据多组所述初始名义应力、所述初始名义应变以及所述有限元仿真模型,确定仿真载荷和仿真位移;
42、目标仿真确定模块,用于从多组所述实验载荷和所述实验位移中确定目标实验载荷和目标实验位移以及从多组所述仿真载荷和所述仿真位移中确定目标仿真载荷和目标仿真位移;
43、目标参数确定模块,用于根据每组所述目标实验载荷和目标实验位移以及所述目标仿真载荷和所述目标仿真位移,确定所述有限元仿真模型的目标参数。
44、根据本公开的第三方面,提供了一种电子设备,包括:
45、至少一个处理器;以及
46、与所述至少一个处理器通信连接的存储器;其中,
47、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行本公开所述的橡胶本构模型参数的确定方法。
48、根据本公开的第四方面,提供了一种存储有计算机指令的非瞬时计算机可读存储介质,所述计算机指令用于使所述计算机执行本公开所述的橡胶本构模型参数的确定方法。
49、本公开的橡胶本构模型参数的确定方法、装置、设备及存储介质,通过对橡胶材料进行压缩实验,获取多组实验载荷和实验位移;再构建橡胶材料的有限元仿真模型并模拟压缩实验;根据每组实验载荷和实验位移,确定与每组实验载荷和实验位移对应的有限元仿真模型的初始参数,初始参数包括初始名义应力和初始名义应变;再根据多组初始名义应力、初始名义应变以及有限元仿真模型,确定仿真载荷和仿真位移;再从多组实验载荷和实验位移中确定目标实验载荷和目标实验位移以及从多组所述仿真载荷和所述仿真位移中确定目标仿真载荷和目标仿真位移;最后根据每组目标实验载荷和目标实验位移以及目标仿真载荷和目标仿真位移,确定有限元仿真模型的目标参数。本方案方案可以不做单轴拉伸实验,根据橡胶材料压缩实验直接拟合本构模型参数,获取的目标参数结果能够匹配实验结果。
50、应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
- 还没有人留言评论。精彩留言会获得点赞!