图像分割方法、装置、图像处理设备及存储介质与流程
本发明实施例涉及图像处理,尤其涉及一种图像分割方法、装置、图像处理设备及存储介质。
背景技术:
1、智能网联汽车技术已大量使用在保障驾驶安全、简化出行和节能减排等方面,同时,计算机科学技术已渗透到汽车行业中以提升性能。其中,计算机视觉技术在驾驶员周边环境感知与理解中起到了至关重要的作用,其客观且精准的提示对驾驶员做出正确决策及合理计划具有较大帮助。通常情况下,车辆视频传感器捕获到的图像信息是三通道彩色图片,与灰度图片相比,彩色图片具有更多的空间信息与梯度信息,有益于分类器实现精准分割。因此,如何通过计算机技术在真实彩色图像中提取有效的信息成为研究热点。
2、受不均匀的光照强度影响,图像中同一目标的颜色分布不规则,这给完整且精准地检测目标带来了巨大挑战。传统模糊c均值聚类(fuzzy c-means,fcm)算法是利用简单欧几里得距离更新隶属度信息,其在迭代过程中忽略了局域信息与空间信息,又因真实彩色图像受光照强度等因素影响,同一目标中的颜色分布与强度不均匀,这将导致fcm不能完全适应彩色真实图像的复杂颜色分布,聚类效果不理想,造成误分类现象,因此图像分割效果较差。
技术实现思路
1、本发明提供了一种图像分割方法、装置、图像处理设备及存储介质,以提高对于彩色图像的聚类准确性,提升图像分割效果。
2、第一方面,本发明实施例提供了一种图像分割方法,包括:
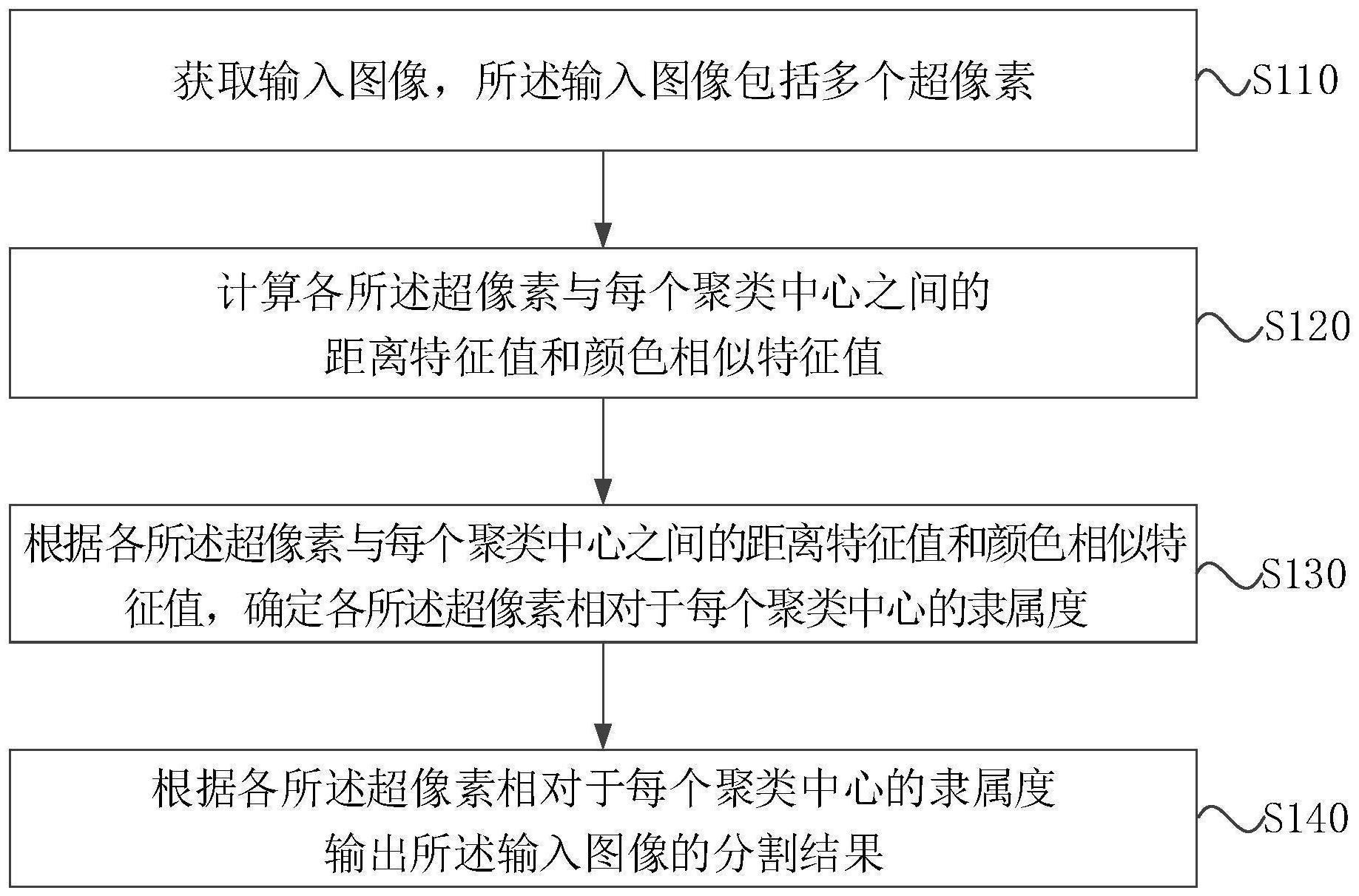
3、获取输入图像,所述输入图像包括多个超像素;
4、计算各所述超像素与每个聚类中心之间的距离特征值和颜色相似特征值;
5、根据各所述超像素与每个聚类中心之间的距离特征值和颜色相似特征值,确定各所述超像素相对于每个聚类中心的隶属度;
6、根据各所述超像素相对于每个聚类中心的隶属度输出所述输入图像的分割结果。
7、第二方面,本发明实施例提供了一种图像分割装置,包括:
8、获取模块,用于获取输入图像,所述输入图像包括多个超像素;
9、第一计算模块,用于计算各所述超像素与每个聚类中心之间的距离特征值和颜色相似特征值;
10、第二计算模块,用于根据各所述超像素与每个聚类中心之间的距离特征值和颜色相似特征值,确定各所述超像素相对于每个聚类中心的隶属度;
11、输出模块,用于根据各所述超像素相对于每个聚类中心的隶属度输出所述输入图像的分割结果。
12、第三方面,本发明实施例提供了一种图像处理设备,包括:
13、一个或多个处理器;
14、存储装置,用于存储一个或多个程序;
15、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如第一方面所述的图像分割方法。
16、第四方面,本发明实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如第一方面所述的图像分割方法。
17、本发明实施例提供了一种图像分割方法、装置、图像处理设备及存储介质,该方法包括:获取输入图像,所述输入图像包括多个超像素;计算各所述超像素与每个聚类中心之间的距离特征值和颜色相似特征值;根据各所述超像素与每个聚类中心之间的距离特征值和颜色相似特征值,确定各所述超像素相对于每个聚类中心的隶属度;根据各所述超像素相对于每个聚类中心的隶属度输出所述输入图像的分割结果。上述技术方案利用距离特征值和颜色相似特征值确定隶属度,考虑了图像中的颜色分布,能够提高对于彩色图像的聚类准确性,提升图像分割效果。
技术特征:
1.一种图像分割方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述输入图像为三通道彩色图像;所述颜色相似特征值基于三个通道的颜色变化量计算得到,所述颜色相似特征值分别与各所述通道的颜色变化量与呈反比例关系。
3.根据权利要求1所述的方法,其特征在于,所述隶属度按照如下公式确定:其中,dki=exp(-dis2(ξk,vi)),ski=exp(-simu2ξk,vi),mki为超像素ξk相对于聚类中心vi的隶属度,dki为超像素ξk与聚类中心vi之间的距离特征值,ski为超像素ξk与聚类中心ξk之间的颜色相似特征值,dis(,)为欧几里得距离的计算函数,simu,为颜色相似度的计算函数。
4.根据权利要求3所述的方法,其特征在于,超像素ξk与聚类中心ξk之间的颜色相似度按照如下公式确定:
5.根据权利要求1所述的方法,其特征在于,根据各所述超像素与每个聚类中心之间的距离特征值和颜色相似特征值,确定各所述超像素相对于每个聚类中心的隶属度,包括:
6.根据权利要求5所述的方法,其特征在于,所述根据目标函数更新所述隶属度矩阵和所述聚类中心,包括:
7.根据权利要求6所述的方法,其特征在于,所述目标函数为:
8.一种图像分割装置,其特征在于,包括:
9.一种图像处理设备,其特征在于,包括:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-7中任一所述的图像分割方法。
技术总结
本发明公开了一种图像分割方法、装置、图像处理设备及存储介质。该方法包括:获取输入图像,所述输入图像包括多个超像素;计算各所述超像素与每个聚类中心之间的距离特征值和颜色相似特征值;根据各所述超像素与每个聚类中心之间的距离特征值和颜色相似特征值,确定各所述超像素相对于每个聚类中心的隶属度;根据各所述超像素相对于每个聚类中心的隶属度输出所述输入图像的分割结果。上述技术方案利用距离特征值和颜色相似特征值确定隶属度,考虑了图像中的颜色分布,能够提高对于彩色图像的聚类准确性,提升图像分割效果。
技术研发人员:谢泽宇,罗逍,赵德芳,陈薪宇,郑震,马欢,祁旭,祝铭含
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!