一种基于自适应海鸟算法的雷达信号开集识别方法
本技术涉及一种基于自适应海鸟算法的雷达信号开集识别方法,属于信号识别。
背景技术:
1、传统的基于深度神经网络的雷达信号识别方法大都是闭集识别,即假设可以获得所有的训练数据,并且将全部数据用于训练,训练完成后得到用于任务的模型。但是随着复杂调制类型的雷达信号逐渐增多,当出现新的调制类型的雷达信号时,传统的闭集识别的方法无法对新类型信号进行及时有效的判别。
2、度量学习依据特征嵌入空间中的样本距离实现分类,增强了适应性,但同类样本特征不够聚集,不同类样本特征不够分散,类别区分的界限模糊,且阈值的确定依赖于专家经验,存在可靠性差和识别效率低的问题。
3、张劭在《基于深度学习的未知调制类型的信号识》中基于度量学习的思想对未知信号进行识别,但其判别需要未知信号样本的积累,且识别准确率低。林万杰在论文《基于深度学习的未知辐射源个体识别的研究》中改进深度度量学习中的经典算法triplet loss解决辐射源个体识别中的未知判别问题,但其在距离判决时依据经验选取判决阈值,使得可靠性不够以及不具备泛化性。
技术实现思路
1、本技术的目的在于提供一种基于自适应海鸟算法的雷达信号开集识别方法,解决低截获概率雷达识别时,经验阈值选取不佳导致识别率低和泛化性差的问题,增强识别方法的可靠性、泛化性和适应性,有效提高未知雷达信号识别的准确率。
2、为实现上述目的,本技术第一方面提供了一种基于自适应海鸟算法的雷达信号开集识别方法,包括:
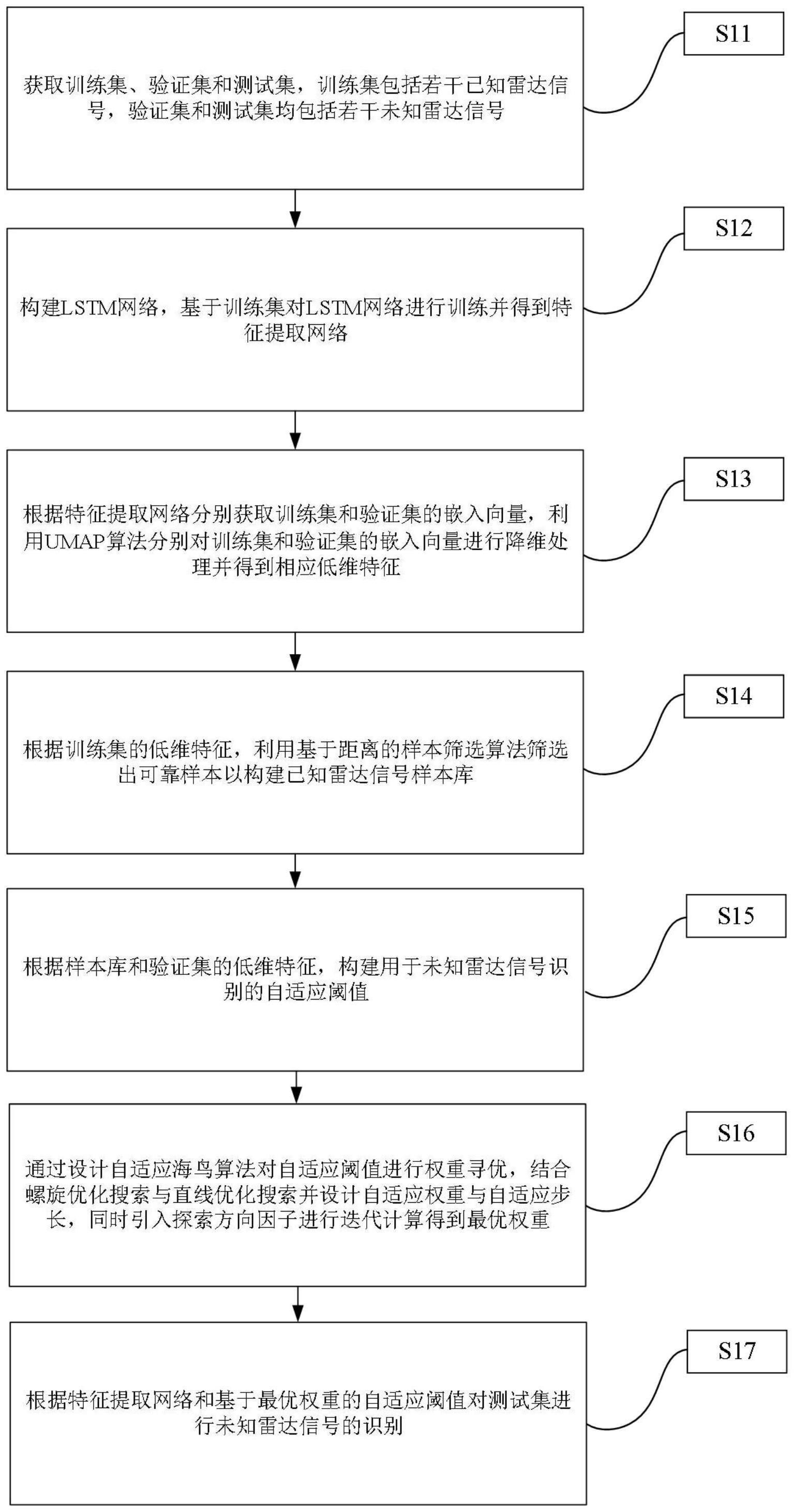
3、获取训练集、验证集和测试集,其中,所述训练集包括若干已知雷达信号,所述验证集和所述测试集均包括若干未知雷达信号;
4、构建lstm网络,基于所述训练集对所述lstm网络进行训练并得到特征提取网络;
5、根据所述特征提取网络分别获取所述训练集和所述验证集的嵌入向量,利用umap算法分别对所述训练集和所述验证集的嵌入向量进行降维处理并得到相应低维特征;
6、根据所述训练集的低维特征,利用基于距离的样本筛选算法筛选出可靠样本以构建已知雷达信号样本库;
7、根据所述样本库和所述验证集的低维特征,构建用于未知雷达信号识别的自适应阈值;
8、通过设计自适应海鸟算法对所述自适应阈值进行权重寻优,结合螺旋优化搜索与直线优化搜索并设计自适应权重与自适应步长,同时引入探索方向因子进行迭代计算得到最优权重;
9、根据所述特征提取网络和基于所述最优权重的自适应阈值对所述测试集进行未知雷达信号的识别。
10、在一种实施方式中,所述基于所述训练集对所述lstm网络进行训练并得到特征提取网络包括:
11、分别对所述训练集中的已知雷达信号和所述验证集中的未知雷达信号做小波散射变换,得到训练集的散射特征和验证集的散射特征;
12、将所述训练集的散射特征作为训练数据对所述lstm网络进行训练,得到所述特征提取网络,其中,所述特征提取网络包括输入层、lstm层、第一全连接层、第二全连接层和softmax层。
13、在一种实施方式中,所述根据所述特征提取网络分别获取所述训练集和所述验证集的嵌入向量包括:
14、分别对所述训练集的散射特征和所述验证集的散射特征执行以下步骤:
15、将相应的散射特征输入至所述输入层进行初始化操作得到第0层输出,将所述第0层输出输入至所述lstm层进行计算得到第1层输出,将所述第1层输出输入至所述第一全连接层进行计算得到第2层输出,将所述第2层输出输入至所述第二全连接层进行计算得到第3层输出,并将所述第3层输出作为相应的嵌入向量。
16、在一种实施方式中,所述利用umap算法分别对所述训练集和所述验证集的嵌入向量进行降维处理包括:
17、分别对所述训练集的嵌入向量和所述验证集的嵌入向量执行以下步骤:
18、根据所述嵌入向量,通过最邻近算法得到邻近数据;
19、根据所述邻近数据,计算得到联合概率和所述联合概率的低维空间分布,计算所述联合概率和所述联合概率的低维空间分布的交叉熵,作为损失函数;
20、根据所述损失函数,通过梯度下降算法得到降维模型;
21、根据所述降维模型,将所述嵌入向量映射到低维特征空间并得到相应低维特征。
22、在一种实施方式中,所述利用基于距离的样本筛选算法筛选出可靠样本以构建已知雷达信号样本库包括:
23、将所述训练集的低维特征按标签分为k个集合,k为信号种类个数;
24、计算各集合的类间距离,得到距离矩阵;
25、基于所述距离矩阵,利用基于距离的样本筛选算法筛选出各信号种类的可靠样本,作为所述已知雷达信号样本库。
26、在一种实施方式中,所述构建用于未知雷达信号识别的自适应阈值包括:
27、计算所述可靠样本的类中心;
28、计算所述验证集的低维特征到所述类中心的欧式距离;
29、根据所述欧式距离构建所述自适应阈值。
30、在一种实施方式中,所述通过设计自适应海鸟算法对所述自适应阈值进行权重寻优,结合螺旋优化搜索与直线优化搜索并设计自适应权重与自适应步长,同时引入探索方向因子进行迭代计算得到最优权重包括:
31、随机生成一个包含若干求偶亭的初始种群,循环执行以下步骤对所述初始种群进行迭代更新,直至得到全局最优解作为所述最优权重:
32、计算各求偶亭的初始位置以及各求偶亭的吸引力和适应度值;
33、结合螺旋优化搜索和直线优化搜索,计算各求偶亭的潜在位置;
34、分别设计自适应步长和自适应权重,同时加入用于维持种群多样化的探索方向因子,得到与所述潜在位置对应的新适应度值;
35、将所述适应度值与所述新适应度值进行比较,对各求偶亭进行位置更新,同时对各求偶亭中的部分求偶亭随机选择一个维度进行位置变异更新;
36、将进行位置更新得到的各求偶亭和进行位置变异更新得到的各求偶亭进行组合,得到组合种群,对所述组合种群中的所有求偶亭的代价函数值从小到大进行排序,保留代价函数值满足预设条件的求偶亭,并淘汰其他求偶亭。
37、在一种实施方式中,所述根据所述特征提取网络和基于所述最优权重的自适应阈值对所述测试集进行未知雷达信号的识别包括:
38、根据所述特征提取网络获取所述测试集的嵌入向量;
39、利用umap算法对所述测试集的嵌入向量进行降维处理并得到测试集的低维特征;
40、计算所述测试集的低维特征到所述类中心的欧式距离;
41、根据所述欧式距离和所述最优权重的自适应阈值,对所述测试集进行未知雷达信号的识别。
42、本技术第二方面提供了一种电子设备,包括:存储器、处理器以及存储在存储器中并可在处理器上运行的计算机程序,该处理器执行计算机程序时实现上述第一方面或者上述第一方面的任一实施方式中的步骤。
43、本技术第三方面提供了一种计算机可读存储介质,上述计算机可读存储介质存储有计算机程序,上述计算机程序被处理器执行时实现上述第一方面或者上述第一方面的任一实施方式中的步骤。
44、由上可见,本技术提供了一种基于自适应海鸟算法的雷达信号开集识别方法,解决低截获概率雷达识别时,经验阈值选取不佳导致识别率低和泛化性差的问题。通过样本筛选算法筛选出可靠样本构建雷达信号样本库,基于雷达信号样本库构建自适应阈值,提高雷达信号开集识别方法的识别率以及增强其普适性;同时设计自适应海鸟算法对自适应阈值权重寻优,构建探索方向因子,结合螺旋优化搜索与直线优化搜索,扩大搜索范围以及加强搜索能力,加入随迭代次数改变的自适应权重与自适应步长,平衡了全局搜索能力与局部搜索能力,提升了雷达信号开集识别方法的可靠性,进一步设计并训练lstm网络,对特征进行提取并得到嵌入向量,增强了网络的泛化性和适应性,提升了雷达信号开集识别方法准确性和普适性,有效提高未知信号识别的准确率。
- 还没有人留言评论。精彩留言会获得点赞!