基于改进的多模态多目标粒子群优化算法的选址优化方法
本发明属于演化计算中的多模态多目标优化研究领域,具体涉及一种基于改进的多模态多目标粒子群优化算法的选址优化方法。
背景技术:
1、在日常生活中,建楼、开店、买房等都需要解决选址的问题。面对选址问题,需要考虑不同决策者的不同需求,例如与学校的距离,与商圈的距离,与地铁站的距离等,满足各方面要求的最优位置并不唯一。此外,受河流、湖泊、桥梁、道路等外界因素的影响,有的方案可能是不可行的。因此选址问题是一个有约束的多模态多目标优化问题。
2、有约束的多模态多目标优化涉及有约束、多模态、多目标三个属性。在多目标优化问题中,通常含有两或三个目标,而且目标之间往往是冲突的,因此求解该类问题得到的并非是唯一的解,而是一组折衷解的集合,称作pareto最优解集(ps),可以使得各个子目标都尽可能地达到最优化。而帕累托最优解集目标空间的映射,称为pareto前沿(pf)。在约束多目标优化中,需要更可行且分布良好的pareto最优解。所有可行的帕累托最优解的集合称为有约束帕累托最优解集(cps),所有不考虑约束的帕累托最优解集称为无约束帕累托最优解集(ups)。它们对应的目标值形成约束帕累托前沿(cpf)和无约束帕累托前沿(upf)。决策空间中的多个有约束帕累托最优解集对应着目标空间中的同一个约束帕累托最优前沿。这个问题就是有约束的多模态多目标优化问题(cmmops)。解决该类问题不仅要考虑目标空间,也要考虑决策空间,需要在可行区域内搜索到多个pareto最优解集。
3、在过去的几十年中,多目标进化算法取得了良好的表现,如nsga-ii、moea/d等。但是已有的多目标进化算法无法找到决策空间中的多个等效的帕累托最优解集,这其中还有部分解可能是不可行的。而有约束的多目标算法只能找到一个cps或多个cps的不同部分,而不能同时找到多个完整cps。此外多模态多目标进化算法近年来也越来越受到研究者们关注。自2005年deb和tiwari提出可以解决单目标/单目标,单模态/多模态的omni-optimizer算法,引入对决策空间分布的考虑,越来越多的多模态多目标算法被提出。2016年,岳彩通和瞿博阳提出了一种基于决策空间的小生境dn-nsgaii,在经典的多目标算法nsgaii的基础上,环境选择的第二标准采用决策空间的拥挤距离而非目标空间的拥挤距离。随后,岳彩通和瞿博阳等人在基于环拓扑和特殊拥挤距离的粒子群算法(mo_ring_pso_scd)中提出一种同时考虑决策空间和目标空间分布情况的特殊拥挤距离,以此作为环境选择的第二标准。此后多数研究都采用了该种拥挤距离计算方式。2019年张等人提出mmo-clrpso,采用一种新的决策空间聚类划分子种群的方式,并在子种群内和子种群间分别采用全局pso和局部pso引导更新。此外与mo_ring_pso_scd不同的是,该算法将环拓扑结构用于子种群间形成小生境而非子种群内。然而这些算法搜索的是整个决策空间,缺乏约束处理技术,这可能会导致解集中有很多解是不可行的。但是通过简单结合现有算法和约束处理技术以解决有约束的多模态多目标选址优化问题并不容易,通过分析发现存在以下问题:
4、1)决策空间中的可行域可能是离散的,狭窄的,距离遥远的,算法在目标空间中找到完整的cpf是困难的。
5、2)多个不同的cps可能位于不同的可行区域,这可能导致算法收敛到某些较大的可行区域,而丢失了其他较小可行区域的最优解集。
6、3)多个不同的cps的收敛难度可能不同,这可能导致算法陷入到某些收敛难度较小的cps,而遗漏了其他的。
7、4)缺乏对决策空间中解分布情况的考虑,这可能导致有约束的多目标算法难以保留更多、更可行的帕累托最优解。
8、5)缺乏约束处理技术,使得很多多模态多目标算法最后保留的解中有部分是不可行的。
技术实现思路
1、本发明的目的是提供一种基于改进的多模态多目标粒子群优化算法的选址优化方法,以解决现有的有约束多目标算法、多模态多目标算法求解选址优化问题时,存在遗漏可行的帕累托最优解集以及搜索到的帕累托解集中有部分解是不可行的问题。
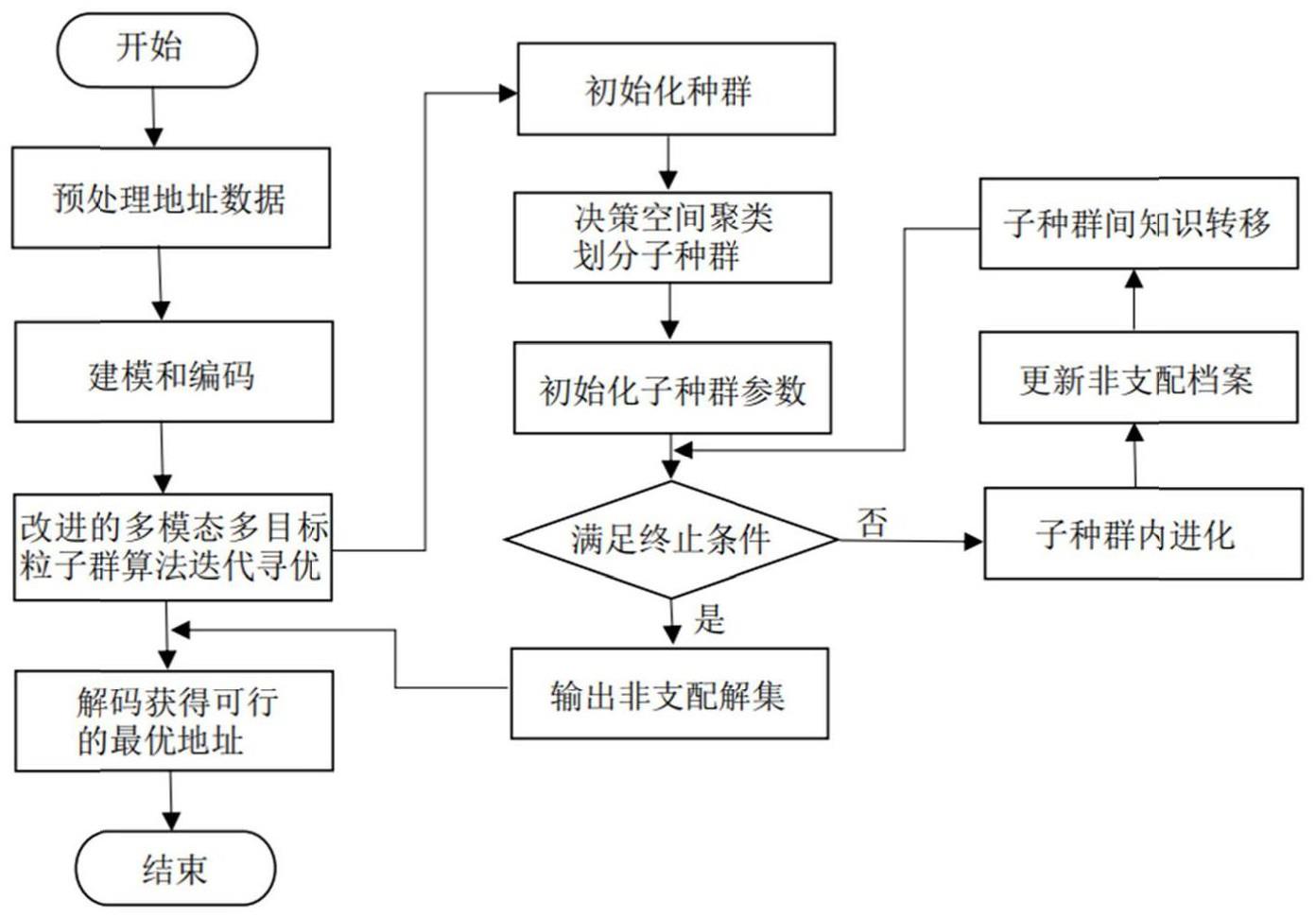
2、为了达到上述目的,本发明所采用的技术方案是:一种基于改进的多模态多目标粒子群优化算法的选址优化方法,具体按照以下步骤实施:
3、步骤1,预处理地址数据;其影响因素包括位置坐标以及不可行区域的位置和大小;
4、步骤2,根据步骤1预处理后的地址数据进行建模和编码,将选址优化问题拟合成目标函数,选址优化问题拟合的函数可表示如下:
5、
6、受限于:
7、
8、其中ai、bj和ck分别表示学校、商圈和地铁站,i、j、k分别代表学校、商圈以及地铁站的个数;q1、q2和q3分别表示河流、湖泊和桥梁道路这种不可行区域;解x若在可行域内则其约束违反值(cv)为0,否则约束违反值对应着解x到所有不可行区域中心的距离的倒数;
9、步骤3,通过多模态多目标粒子群优化算法迭代寻找步骤2得到的目标函数的最优解,得到一组满足约束条件的非支配解集;
10、步骤4,将步骤3得到的非支配解集进行解码获得可行的最优地址。
11、本发明的技术方案,还具有以下特点:
12、作为本发明的一种优选的技术方案,步骤3,通过多模态多目标粒子群优化算法迭代寻找步骤2得到的目标函数的最优解,得到一组满足约束条件的非支配解集,具体按照以下步骤实施:
13、3.1,对多模态多目标粒子群优化算法进行初始化,得到大小为np的初始化种群;
14、3.2,对步骤3.1初始化后的种群聚类划分,得到m个子种群;
15、3.3,初始化步骤3.2得到的子种群的参数,得到子种群的非支配档案gba和邻域最优档案nba;通过非支配关系以及特殊拥挤距离进行排序,将子种群中的非支配解存入非支配档案gba,邻域最优档案nba初始化为gba;
16、3.4,子种群内解进化,之后更新非支配档案,再进行子种群之间的知识转移;
17、3.5,判断是否满足终止条件;若满足则执行步骤3.6,若不满足,则重新进行步骤3.4;
18、3.6,输出满足约束条件的非支配解集。
19、作为本发明的一种优选的技术方案,在所述步骤3.4中,子种群内进化具体为:
20、为了缓解全局最优gbest过度引导可能导致振荡,在mmo-clrpso中采用一种发散引导策略,利用子种群中的最佳解和最差解的历史信息作为引导;因为最好的解有助于收敛,最差的解有助于多样性,所以子种群可以在勘探和开发之间取得更好的平衡;以下给出了更新第k个子种群中第i个解在第t代速度、位置的更新公式:
21、
22、
23、式中,和分别表示第k个子种群中最佳和最坏解的第j维的历史信息;c1和c2为两个加速度常数,用于控制个体认知和社会认知的比例,以平衡勘探和开发,通常设置为2.05;r1和r2是(0,1)中随机生成的两个数。为第k个子种群中第i个解第j维的位置;
24、此外,由于错误方向的引导,种群可能过早收敛;因此设计一种基于柯西变异的精英学习策略,引导种群向着更有希望的区域方向进行探索;第t代第k个子种群中第i个解的位置更新如公式(3)所示;
25、
26、其中表示当前子种群中最优解的任意维度,和为任意维度的上下界,c(0,1)为柯西分布函数随机产生的数,由于柯西变异有更高的概率做出更长的跳跃,可有效逃离局部最优。
27、作为本发明的一种优选的技术方案,在所述步骤3.4中,更新非支配档案具体为:为了找到局部pss和全局pss,采用一种新的非支配解集更新方式:每隔总进化代数的10%,对非支配解集进行精英选择更新,保留更有希望的非支配解。
28、作为本发明的一种优选的技术方案,在所述步骤3.4中,进行子种群之间的知识转移具体为:为促进子种群间信息的交互,采用知识转移策略构建子种群的动态邻域结构,子种群的邻居一个是索引相邻的,一个是随机选取的,以此扩展搜索空间,保持种群的多样性。
29、本发明的有益效果是:本发明采用发散引导策略可以有效缓解全局最优解过度引导而导致的振荡,柯西变异的较大步长增大了跳出局部最优的可能;知识转移策略又促进了子种群间的知识转移,提高种群开发能力;更新策略在很大程度上保留了更有希望的非支配解,帮助算法为决策者提供更多的选择;有约束的非支配关系使得算法在环境选择时考虑约束条件,去除那些在不可行区域内的解,使得解更合理,更优质。本发明所提出的mppso-dgkt比现有的多模态多目标算法更能够有效地解决有约束的多模态多目标选址优化问题,下面结合附图和具体实施方式进行进一步说明。
30、该算法改进了子种群内速度位置的更新方式,可以缓解全局最优gbest可能带来的错误引导,并利用柯西变异的较大步长促进种群对搜索空间的探索。同时该算法改进了子种群间构建邻域的方式,充分利用不同子种群中的多样信息,增强种群的开发能力。此外,还改进了非支配档案的更新方式,精英选择更有希望的最优解,以及利用有约束的非支配关系作为环境选择的第一标准,去除不满足约束的不可行解,使得算法可有效解决有约束的多模态多目标选址优化问题。解决了现有的有约束多目标算法、多模态多目标算法求解选址优化问题时,遗漏部分可行的帕累托最优解集以及搜索到的帕累托解集中有部分解是不可行的问题。
- 还没有人留言评论。精彩留言会获得点赞!