基于SRA-Net的路面裂缝分割方法与流程
本发明涉及一种图像分割领域,尤其涉及一种基于sra-net的路面裂缝分割方法。
背景技术:
1、传统的人工裂缝分割方法虽然简单,但是往往存在主观性较强,劳动力成本较大等缺点,这就造成检测的结果可能不同,可靠性也不高,人工分割方法已经不能适应公路发展的要求。自80年代以来,由于人工智能和计算机视觉的发展,路面状况数据的收集与评估已经从人工逐渐过渡到自动化。相比传统人工分割,自动化的分割方法克服了人工检测的缺点,并且对裂缝的特征更加敏感,这对后期维护的决策非常重要。传统机器学习的方法虽然存在一定的自动化特点,但往往这些方法也需要人工提取一定特征,又由于在路面裂缝图像存在着裂缝背景复杂、裂缝出现位置存在随机性、采集时的光照等原因导致成像质量差等因素,导致了传统机器学习方法存在鲁棒性差,泛化能力有限的缺点。自2016年深度学习首次运用到路面裂缝分割领域,经过不断发展,虽已经很大程度上克服了传统机器学习的缺点,但现有模型仍然存在易受噪声影响、对细小裂缝的特征提取不足、对复杂背景鲁棒性不高的缺点。
2、因此,为解决上述技术问题,亟需提出一种新的技术手段。
技术实现思路
1、有鉴于此,本发明提供一种基于sra-net的路面裂缝分割方法,旨在解决路面裂缝经典语义分割模型对细粒特征提取的效果差、对细小裂纹和不明显特征不敏感,导致分割效果差的问题,提高现有路面裂缝语义分割模型精确度,iou等指标。
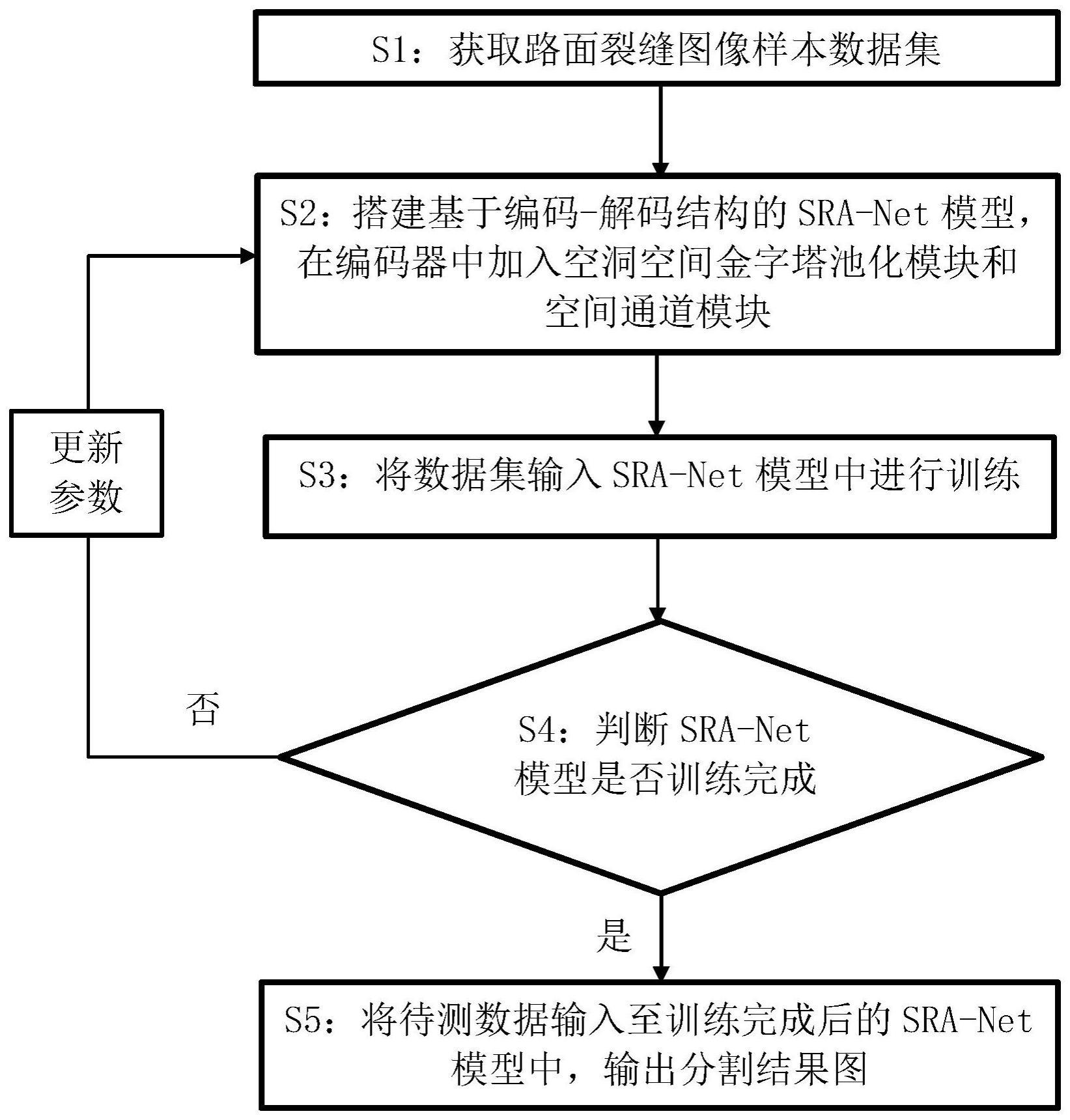
2、本发明提供的一种基于sra-net的路面裂缝分割方法,包括以下步骤:
3、s1.获取路面裂缝图像样本数据集;
4、s2.搭建基于编码-解码结构的sra-net模型,在编码器中加入空洞空间金字塔池化模块和空间通道模块;
5、s3.将数据集输入sra-net模型中进行训练;
6、s4.判断sra-net模型是否训练完成,如是,则进入步骤s5,如否,则更新sra-net模型的参数,返回步骤s3中;
7、s5.将待测数据输入至训练完成后的sra-net模型中,输出分割结果图。
8、进一步,步骤s2中,通过如下方法构建sra-net模型中的编码器模块,并进行编码:
9、构建编码器,解码器包含卷积核、残差块和空洞空间金字塔模块,其中,残差块中采用空间通道模块进行下采样;
10、对图像进行编码:
11、s211.构建输入图像的1×1卷积核,将rgb图像输入残差块,在残差块中将改变通道数,输出特征图m1;
12、s212.在残差块后加入空洞空间金字塔池化aspp模块,对输入的特征图进行空洞卷积采样;
13、s213.在空洞空间金字塔池化aspp模块后,再次加入残差块spd-res block,残差块中使用空间通道模块进行下采样,根据输入通道的不同,对输入的特征图叠加不同数量的残差块,并改变通道数,输出特征图m2;
14、s214.依次重复步骤s212和步骤s213各三次,分别输出特征图m3、特征图m4和特征图m5;
15、s215.将特征图m5输入空洞空间金字塔池化模块aspp,改变通道数,输出特征图m6。
16、进一步,空洞空间金字塔池化以不同采样率的空洞卷积并行采样,将采样的结果相加,得到精度更高的特征图,并改变通道数。
17、进一步,残差块中,使用空间通道模块进行下采样,采用非线性激活函数relu6作为激活函数:
18、空间通道模块将输入残差块特征图的特征层沿通道方向进行切割,再沿空间方向进行拼接,得到切割并拼接后的特征图,切割公式为:
19、f0,0=x[0:s:scale,0:s:scale],f1,0=x[1:s:scale,0:s:scale],...,fscale-1,0
20、=x[scale-1:s:scale,0:s:scale];
21、f0,1=x[0:s:scale,1:s:scale],f1,1,...,fscale-1,1
22、=x[scale-1:s:scale,1:s:scale];
23、f0,scale-1=x[0:s:scale,scale-1:s:scale],f1,scale-1,...,fscale-1,scale-1
24、=x[scale-1:s:scale,scale-1:s:scale].
25、其中,x表示输入残差块的特征图,s表示输入残差块的特征图的长或者宽,fx,y表示下采样后的子图,scale表示下采样的比例因子;
26、非线性激活函数relu6公式为:
27、f(c)=min{max(0,c),6}
28、其中,c为来自上一层神经网络的输入量。
29、进一步,步骤s2中,通过如下方法构建sra-net模型中的解码器模块,并进行解码:
30、构建解码器,解码器中包含卷积核、concat拼接模块和双线性插值上采样模块;
31、对特征图进行解码:
32、s221.对编码器输出的特征图m6进行双线性插值上采样,得到解码器中的特征图m7;
33、s222.通过跳跃连接的方式,将解码器输出的特征图与编码器中通道数相同的m1-m4特征图进行concat拼接,实现特征融合;
34、s223.将经过concat拼接后的图像通过两个3×3卷积核,改变通道数为拼接后通道数的四分之一;
35、s224.对步骤s223中得到的图像进行双线性插值上采样,输出特征图m8;
36、s225.依次重复步骤s222-s224两次,分别输出特征图m9和特征图m10;其中,重复过程中,与编码器进行concat拼接的解码器特征图来源于前一层经过双线性插值后输出的特征图;
37、s226.将特征图m1与特征图m10进行concat拼接,并将拼接后的图像通过两个3×3卷积核,得到通道为64的图像,将通道为64的图像通过一个1×1卷积核,并将通道数改变为2,输出实现裂缝像素与背景像素分割的图片。
38、进一步,步骤s3中,通过如下方法对sra-net模型进行训练:
39、将步骤s1中采集的数据集输入sra-net模型进行训练,设置初始学习率为0.01,冲量为0.9,采用权重衰减的方式防止过拟合,采用sdg优化器对权重进行迭代更新,损失函数采用交叉熵损失与dice损失相加的方式;
40、损失函数公式为:
41、
42、其中,loss表示损失函数,i表示图像中的像素点,表示像素点的预测值,yi表示像素的标签值,n表示像素点总数。
43、进一步,步骤s4中,通过如下方法判断sra-net模型是否训练训练完成:
44、对每个采用数据集进行验证,并计算dice,判断是否为dice函数最高的模型,如是,则训练完成,进入步骤s5,如否,则更新sra-net模型的参数,返回步骤s3中,继续训练,直到模型为dice函数最高的模型。
45、本发明的有益效果:本发明公开了一种基于sra-net的路面裂缝分割方法,是在融合残差结构与跳越连接结构的优点上,提出的一种对路面裂缝图像进行语义分割的方法,通过向残差结构中组合加入空间通道模块与空洞空间金字塔池化模块来避免传统卷积与池化下采样的细粒特征丢失,增强了模型对细小裂缝与低分辨率图像的特征提取能力,提高了与各个特征层之间的联系,使sra-net模型达到了更好的分割效果。
- 还没有人留言评论。精彩留言会获得点赞!