一种风电塔筒螺栓的螺母缺失判断方法及系统与流程
本发明涉及电力检修,特别是一种风电塔筒螺栓的螺母缺失判断方法及系统。
背景技术:
1、电塔筒是在风力发电中用于支撑和固定风叶的支柱,可以高达几十米或者上百米。整个风电塔筒由多个不同长度的空心子塔筒通过法兰母固定连接。法兰母又是依靠固定件(螺栓、垫片与螺母的组合)将相邻的子塔筒进行连接。现在风电塔筒中的螺栓紧固和巡检工作主要靠人工完成,检修人员需要检测法兰母上与螺栓固定的螺母是否丢失,从而确保法兰母有效固定空心子塔筒。但是该间隙工作存在工作量大、危险系数高、人力成本高等问题。
2、而因为法兰母的位置固定,其固定的螺栓位置也固定。为解决上述问题,许多企业目前正在使用无人机,在无人机上设置有固定的线路以及拍摄点。当无人机进过拍摄点时会法兰母进行拍摄,得到含有螺栓的图片,然后检修人员再观察图片中是否存在有螺栓上的螺母是否丢失,减少检修人员的检修风险,但是由于法兰母以及螺栓数量众多,采用人工观察时容易出现视觉疲劳,从而出现漏检、误检的风险。
技术实现思路
1、针对上述缺陷,本发明的目的在于提出一种风电塔筒螺栓的螺母缺失判断方法及系统,实现螺母是否丢失的自动化检测,解决人工检测出现漏检、误检的问题。
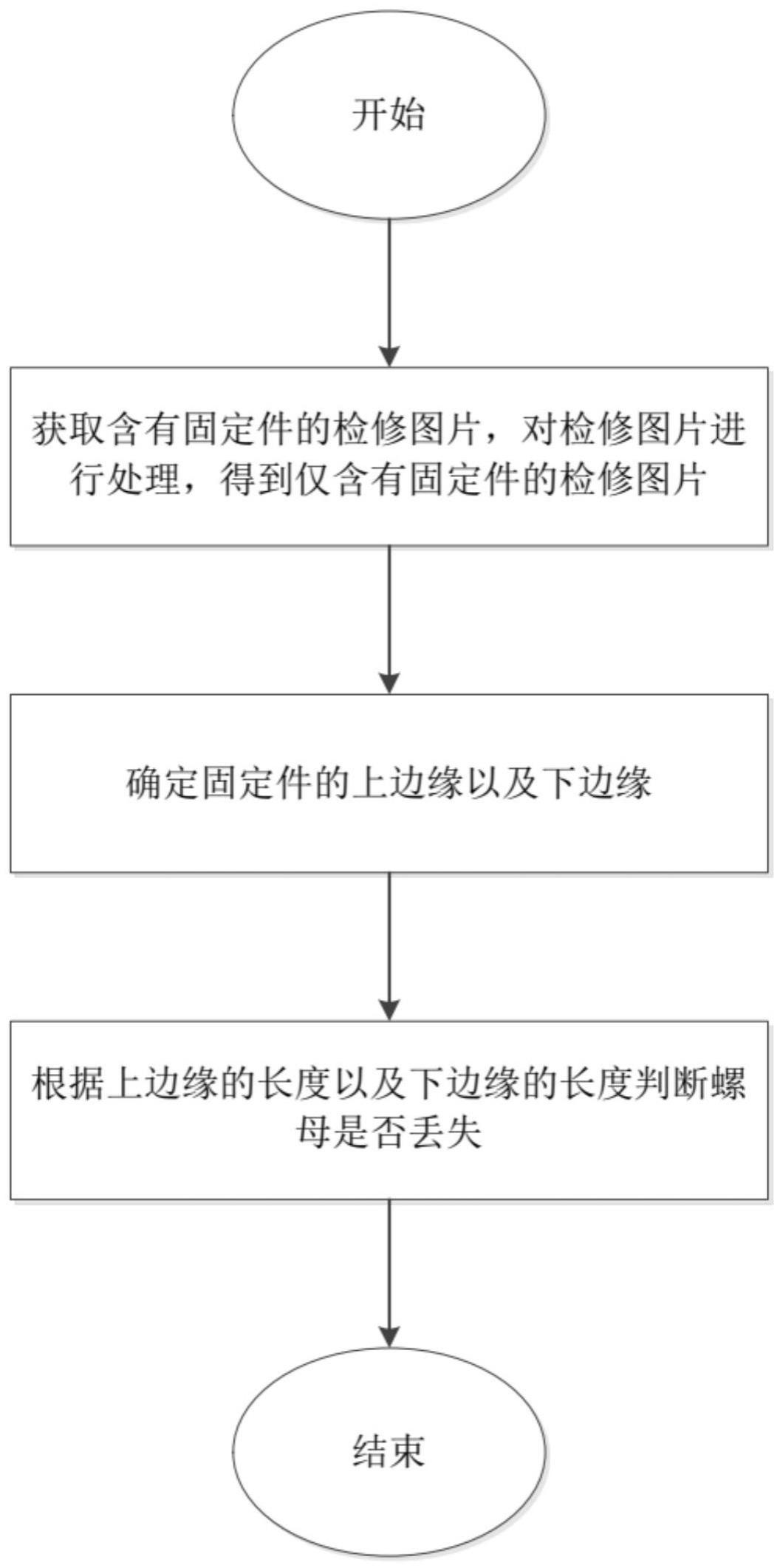
2、为达此目的,本发明采用以下技术方案:一种风电塔筒螺栓的螺母缺失判断方法,包括以下步骤:
3、步骤s1:获取含有固定件的检修图片,对检修图片进行处理,得到仅含有固定件的检修图片;
4、步骤s2:确定固定件的上边缘以及下边缘;
5、步骤s3:根据上边缘的长度以及下边缘的长度判断螺母是否丢失。
6、优选的,所述步骤s1的具体步骤如下:
7、步骤s11:对检修图片进行缩放处理,得到缩放后第一图片;
8、步骤s12:在第一图片中,截取大小固定的第二图片;
9、步骤s13:使用大津律法对第二图片进行处理,得到对第一图片所使用二值化的阈值;
10、步骤s14:基于二值化的阈值对所述第一图片进行二值化,得到第三图片;
11、步骤s15:在第三图片中进行轮廓提取;
12、步骤s16:对提取的轮廓按照面积的大小进行排序,保留面积最大的轮廓,并将其余轮廓的像素值赋值0,得到仅含有固定件的第四图片。
13、优选的,在进行步骤s2前,还需要执行如下步骤;
14、步骤s17:对采用形态学中的膨胀运算对所述第四图片进行处理,得到第五图片。
15、优选的,所述步骤s2的具体步骤具体如下:
16、获取第五图片中所有白色像素点的坐标;
17、获取每一个白色像素点到左上角顶点的欧式距离,并根据距离从小到大进行排列,将欧式距离最小的白色像素点作为上边缘的第一边缘点;
18、获取每一个白色像素点到右上角顶点的欧式距离,并根据距离从小到大进行排列,将欧式距离最小的白色像素点作为上边缘的第二边缘点;
19、将第一边缘点与第二边缘点进行连线操作,得到固定件的上边缘;
20、获取每一个白色像素点到左下角顶点的欧式距离,并根据距离从小到大进行排列,将欧式距离最小的白色像素点作为下边缘的第三边缘点;
21、获取每一个白色像素点到右下角顶点的欧式距离,并根据距离从小到大进行排列,将欧式距离最小的白色像素点作为下边缘的第四边缘点;
22、将第三边缘点与第四边缘点进行连线操作,得到固定件的下边缘。
23、优选的,所述步骤s3的具体步骤具体如下:
24、分别计算上边缘与下边缘的长度;
25、若所述下边缘长度大于上边缘的阈值倍数,则判断当前固定件不存在螺母丢失;
26、若所述下边缘长度小于或者等于上边缘的阈值倍数,则判断当前固定件存在螺母丢失。
27、一种风电塔筒螺栓的螺母缺失判断系统,使用所述一种风电塔筒螺栓的螺母缺失判断方法,包括获取模块、确认模块以及对比模块;
28、所述获取模块用于获取含有固定件的检修图片,对检修图片进行处理,得到仅含有固定件的检修图片;
29、所述确定模块用于确定固定件的上边缘以及下边缘;
30、对比模块用于根据上边缘的长度以及下边缘的长度判断螺母是否丢失。
31、优选的,所述获取模块模块包括第一处理模块、第二处理模块、第三处理模块、第四处理模块、第五处理模块以及第六处理模块;
32、所述第一处理模块用于对检修图片进行缩放处理,得到缩放后第一图片;
33、所述第二处理模块用于在第一图片中,截取大小固定的第二图片;
34、所述第三处理模块用于使用大津律法对第二图片进行处理,得到对第一图片所使用二值化的阈值;
35、所述第四处理模块用于基于二值化的阈值对所述第一图片进行二值化,得到第三图片;
36、所述第五处理模块用于在第三图片中进行轮廓提取;
37、所述第六处理模块用于对提取的轮廓按照面积的大小进行排序,保留面积最大的轮廓,并将其余轮廓的像素值赋值0,得到仅含有固定件的第四图片。
38、优选的,所述获取模块模块还包括第七处理模块;
39、所述第七处理模块用于对采用形态学中的膨胀运算对所述第四图片进行处理,得到第五图片。
40、优选的,所述确认模块包括上边缘确认模块以及下边缘确认模块;
41、所述上边缘确认模块用于获取第五图片中所有白色像素点的坐标;
42、获取每一个白色像素点到左上角顶点的欧式距离,并根据距离从小到大进行排列,将欧式距离最小的白色像素点作为上边缘的第一边缘点;
43、获取每一个白色像素点到右上角顶点的欧式距离,并根据距离从小到大进行排列,将欧式距离最小的白色像素点作为上边缘的第二边缘点;
44、将第一边缘点与第二边缘点进行连线操作,得到固定件的上边缘;
45、所述下边缘确认模块用于获取每一个白色像素点到左下角顶点的欧式距离,并根据距离从小到大进行排列,将欧式距离最小的白色像素点作为下边缘的第三边缘点;
46、获取每一个白色像素点到右下角顶点的欧式距离,并根据距离从小到大进行排列,将欧式距离最小的白色像素点作为下边缘的第四边缘点;
47、将第三边缘点与第四边缘点进行连线操作,得到固定件的下边缘。
48、优选的,所述对比模块具体执行如下操作:
49、分别计算上边缘与下边缘的长度;
50、若所述下边缘长度大于上边缘的阈值倍数,则判断当前固定件不存在螺母丢失;
51、若所述下边缘长度小于或者等于上边缘的阈值倍数,则判断当前固定件存在螺母丢失。
52、上述技术方案中的一个技术方案具有如下优点或有益效果:通过图像的处理技术以及上、下边缘长度对固定件的螺母是否丢失进行自动的判定,无需人工进行参与,从容避免了人工在进行观察时出现视觉疲劳、漏检、误检的问题。
- 还没有人留言评论。精彩留言会获得点赞!