一种基于Yolov5模型的烟火检测识别算法的制作方法
本发明涉及计算机,尤其涉及一种基于yolov5模型的烟火检测识别算法。
背景技术:
1、随着社会的发展和进步,人们对灾难的提前预防,并加以干预的意识正在不断提高。而火灾更是一种严重威胁人类生命以及财产安全的灾害,更因为其破坏性、不可控性,火灾的预防和尽早发现,一直是人类社会中最重要的研究课题之一。
2、比较传统的烟火识别检测技术,主要是针对于烟火的特征进行提取分析,以此对烟火进行识别。常用的方法有利用帧差法,前后多帧进行比较分析,以求对烟火进行识别;也有利用rgb颜色进行分析,利用火焰燃烧时候的特殊火焰特征,采取关于亮度、红蓝值的信息,从而进行对烟火的识别检测;还有针对于烟火的形状、纹理以及特征进行分析对比,也能对烟火进行识别。虽然这些较为传统的烟火识别方法也能对绝大部分烟火进行识别检测,更有计算量小、识别速度快等优点。但它准确率低,识别率低、缺乏小面积精确识别的等等缺点,更不可忽视。
3、近几年来,随着深度学习的发展,烟火识别技术也有了一定程度上的进步。而其中比较常见的是yolo系列的算法,但是现有的烟火检测算法准确性低和误报率高。
4、综上所述,需要一种基于yolov5模型的烟火检测识别算法来解决现有技术中所存在的不足之处。
技术实现思路
1、针对现有技术的不足,本发明提供了一种基于yolov5模型的烟火检测识别算法,旨在解决上述问题。
2、为实现上述目的,本发明提供如下技术方案:一种基于yolov5模型的烟火检测识别算法,包括以下步骤:
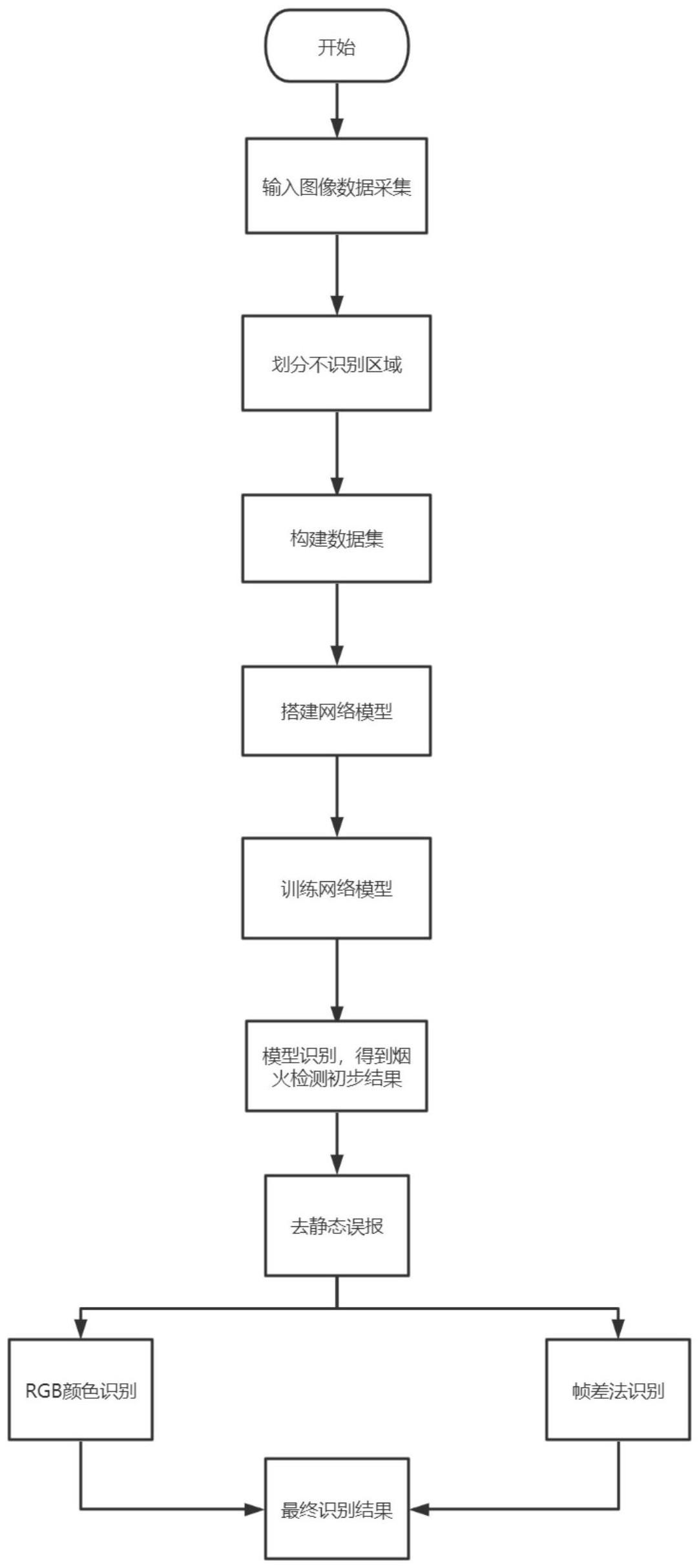
3、步骤s1:搜集烟火图像,输入烟火图像;
4、步骤s2:划分不予识别区域,使用者手动划出不予识别区域;
5、步骤s3:将完成划分不予识别区域后的烟火图像,进行数据采集,构建成烟火图像数据集;
6、步骤s4:将烟火图像数据集,在yolov5基础上,对模型的锚框进行重新设计,并额外嵌入处理信息机制单元;
7、步骤s5:对建立的烟火数据集进行深度学习训练,设置训练路径,读取训练的参数,加载训练模型,选择训练的优化器,加载训练集,最终完成训练,得到模型t1;
8、步骤s6:将模型t1进行模型识别,得到烟火检测初步结果;
9、步骤s7:初步结果去静态误报,采用rgb三通道检测法和帧差法共同进行去静态误报,得到识别结果。
10、首先搜集烟火图像,形成烟火图像集,将烟火图像集输入,划分出烟火图像集中图像的不予识别的烟火区域,再进行数据采集,构建成烟火图像数据集,在yolov5基础上,对锚框进行重新设计,并额外嵌入处理信息机制单元,对建立的烟火数据集进行深度学习训练,设置训练路径,读取训练的参数,加载训练模型,选择训练的优化器,加载训练集,最终完成训练,得到模型t1,将模型t1进行模型识别,得到烟火检测初步结果,最后将初步结果去静态误报,采用rgb三通道检测法和帧差法共同进行去静态误报,得到识别结果,通过深度学习算法的应用,极大的提高了识别率,再通过rgb三通道检测法和帧差法共同进行去静态误报,则在最大程度上降低了深度学习算法误报率高的问题,检测准度高,大大提高了小目标的鲁棒性。
11、可选的,所述步骤s1中烟火图像包括若干环境和形态下的烟火图片。烟火图像包括至少3万张不同环境、不同形态下的烟火图片,庞大的数据集,提高了最终训练出来的模型性能。
12、可选的,所述步骤s2中划出不予识别区域可去除动态误报和遮挡隐私。使用者可以手动的划出不予识别的区域,手动划分框选,减少了计算,则大大提高了检测效率以及精确率,可以排除城市工厂化工烟囱所排放的烟雾、农家生火做饭的烟囱所产生的烟雾,它的确是烟雾,但却不在识别范围之内;在场景中存在涉及隐私,或者涉密的场景和人,划分出不识别的区域,降低了误报率也提高了检测的效率和精度。
13、可选的,所述步骤s4中锚框进行重新设计的算法为kmeans聚类算法,具体为:
14、步骤s411:输入锚框bboxes、簇数和更新簇坐标的方法;
15、步骤s412:在所有的bboxes中随机挑选k个作为簇中心;
16、步骤s413:通过k_means++计算初始值,并计算每个bboxes离每个簇的距离;
17、步骤s414:计算每个bboxes距离最近的簇中心,根据每个簇中的bboxes重新计算簇中心;
18、步骤s415:计算单独一个点和一个中心的距离,计算中心点和其他点直接的距离,得到距离集t2。
19、通过输入锚框bboxes、簇数和更新簇坐标的方法,在kmeans聚类算法的计算下得到距离集t2,通过深度kmeans聚类学习算法对锚框进行重新设计,得到模型的距离集t2。
20、可选的,所述步骤s4中处理信息机制单元的算法具体为:
21、步骤s421:输入距离集t2,通过计算得出x最大池和y最大池;
22、步骤s422:通过concat函数映射计算、conv2d卷积函数计算和batchnorm训练计算;
23、步骤s423:通过non-linear非线性计算和spilt函数计算
24、步骤s424:通过双重conv2d卷积函数计算和sigmoid神经元非线性函数计算,最后通过re-weight实时目标检测;
25、步骤s425:完成步骤s321至步骤s424的训练后,输入距离集t1,即可直接获取re-weight实时目标检测。
26、在信息处理单元中输入距离集t2,通过信息处理单元对距离计进行concat函数映射计算、conv2d卷积函数计算和batchnorm训练计算,再通过non-linear非线性计算和spilt函数计算,最后通过双重conv2d卷积函数计算和sigmoid神经元非线性函数计算,最后通过re-weight实时目标检测。
27、可选的,所述步骤s6中rgb三通道检测法为利用烟火的r值、g值和b值的特征判断而去除静态误报。
28、可选的,所述rgb三通道检测法为在排除干扰区的图片,进行再次识别;主要采取色彩值的确定火焰的形态和范围,火焰图像颜色分布及灰度分布有一定规律,根据火焰燃烧现象,用三原色分布配比来确定火焰的燃烧情况:r为红色,g为绿色,b为蓝色;
29、r=r/(r+g+b)
30、g=g/(r+g+b)
31、b=b/(r+g+b)
32、根据实际火焰图片推算出r、g、b为区段值
33、x<r<y
34、x1<g<y1
35、x2<b<y2
36、当r、g、b同时满足区段值时视为火焰。
37、可选的,所述骤s6中帧差法为采用前后n帧的烟火面积、形状来判断而去除静态误报。
38、通过对rgb三通道进行不同特性的分析,利用火焰燃烧时,所产生r值、g值和b值的特征,以去判断当前是否是烟火而非静态误报;同时,采用另一种传统的烟火识别方法---帧差法。将前后n帧的暂定识别的“烟火”进行形状对比,因为烟火是动态的,如果是静态误报,那么前后n帧的烟火面积、形状将不会有改变。所以以此进一步的判断是否是静态误报,则在最大程度上降低了深度学习算法误报率高的问题。
39、本发明的有益效果:
40、1、本发明中,首先搜集烟火图像,形成烟火图像集,将烟火图像集输入,划分出烟火图像集中图像的不予识别的烟火区域,再进行数据采集,构建成烟火图像数据集,在yolov5基础上,对锚框进行重新设计,并额外嵌入处理信息机制单元,对建立的烟火数据集进行深度学习训练,设置训练路径,读取训练的参数,加载训练模型,选择训练的优化器,加载训练集,最终完成训练,得到模型t1,将模型t1进行模型识别,得到烟火检测初步结果,最后将初步结果去静态误报,采用rgb三通道检测法和帧差法共同进行去静态误报,得到识别结果,通过深度学习算法的应用,极大的提高了识别率,再通过rgb三通道检测法和帧差法共同进行去静态误报,则在最大程度上降低了深度学习算法误报率高的问题,检测准度高,大大提高了小目标的鲁棒性;
41、2、本发明中,使用者可以手动的划出不予识别的区域,手动划分框选,减少了计算,则大大提高了检测效率以及精确率,可以排除城市工厂化工烟囱所排放的烟雾、农家生火做饭的烟囱所产生的烟雾,它的确是烟雾,但却不在识别范围之内;在场景中存在涉及隐私,或者涉密的场景和人,划分出不识别的区域,降低了误报率也提高了检测的效率和精度;
42、3、本发明中,采用rgb三通道和帧差法共同作用,大大降低了深度学习算法误报率,具有一定的使用价值和推广价值。
- 还没有人留言评论。精彩留言会获得点赞!