车牌识别方法、电子设备、系统及计算机可读存储介质与流程
本技术涉及图像检测、机器学习的,尤其涉及车牌识别方法、电子设备、系统及计算机可读存储介质。
背景技术:
1、渣土车,也称拉土车、运渣车,是指用途是运送沙石等建筑料的卡车。渣土车体积庞大,驾驶室高,难以通过人工检测的方式检测其作业状态和装载程度,现有技术主要依赖单个普通摄像头进行图像采集,从而完成车牌的识别,但图像清晰度差,成像像素较少,细节容易缺失,捕获的车牌质量低,总体识别效果差,夜间车牌识别错误率高。因此,如何准确识别渣土车的车牌信息成为亟待解决的问题。
2、专利cn113807344a公开了一种渣土车车牌的识别方法,该识别方法的步骤包括:s1:视频图像提取:获取摄像头拍摄的实时视频流,并对所述实时视频流进行解析从而得到实时图像;s2:渣土车检测:利用改进的yolo算法对步骤s1得到的实时图像进行渣土车检测识别,并将初次检测识别到渣土车的实时图像进行暂存;s3:跟踪渣土车,选出渣土车车牌抓拍图像:对步骤s2初次检测识别到的渣土车进行跟踪,根据跟踪的结果得到渣土车图像在实时图像中的位置,并从实时图像中抠出渣土车小图;使用模糊度量算法度量渣土车小图的清晰度,选出最清晰的渣土车小图;将最清晰的渣土车小图所在的实时图像作为最终的渣土车车牌抓拍图像;s4:车牌区域识别:使用改进的yolo算法识别步骤s3得到的最终的渣土车车牌抓拍图像中的车牌区域,所述车牌区域包括车尾的车牌区域和车尾车牌放大区域;s5:车牌识别:采用cnn提取车牌区域的图像空间特征,再使用lstm提取车牌区域的序列特征,使用ctc算法解码获得车尾车牌放大区域中的车牌号和车尾的车牌区域中的车牌号,并进行保存;s6:车牌校验:采用模糊匹配算法对步骤s5保存的车尾车牌放大区域中的车牌号和车尾的车牌区域中的车牌号进行模糊匹配:若车尾车牌放大区域和车尾的车牌区域的相同位置得到的车牌号相同,则将车尾车牌放大区域或车尾的车牌区域的车牌号作为正确的车牌号;若车尾车牌放大区域和车尾的车牌区域的相同位置得到的车牌号不同,则将步骤s5中车牌识别概率大的一方作为正确的车牌号。该方法利用一个固定焦距的摄像头采集视频,整个过程需要对视频截图后的多个图像进行清晰度计算,之后确定其中最清晰的图像完成车牌识别,整个识别效率较低。
3、基于此,本技术提供了车牌识别方法、电子设备、系统及计算机可读存储介质,以改进现有技术。
技术实现思路
1、本技术的目的在于提供车牌识别方法、电子设备、系统及计算机可读存储介质,利用焦距可变的摄像头对渣土车的车牌进行识别,识别效率高。
2、本技术的目的采用以下技术方案实现:
3、第一方面,本技术提供了一种车牌识别方法,所述方法包括:
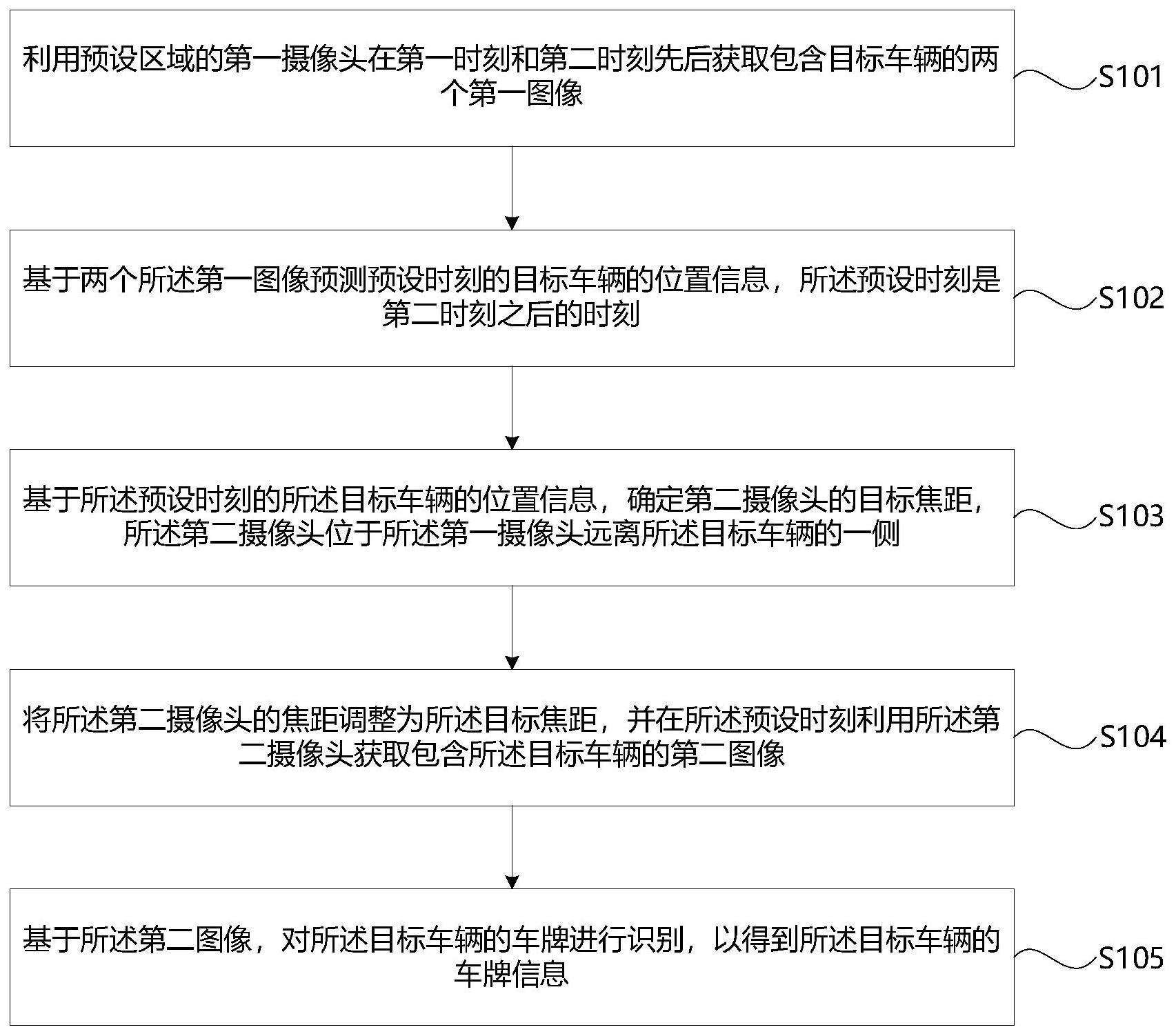
4、利用预设区域的第一摄像头在第一时刻和第二时刻先后获取包含目标车辆的两个第一图像;
5、基于两个所述第一图像预测预设时刻的目标车辆的位置信息,所述预设时刻是第二时刻之后的时刻;
6、基于所述预设时刻的所述目标车辆的位置信息,确定第二摄像头的目标焦距,所述第二摄像头位于所述第一摄像头远离所述目标车辆的一侧;
7、将所述第二摄像头的焦距调整为所述目标焦距,并在所述预设时刻利用所述第二摄像头获取包含所述目标车辆的第二图像;
8、基于所述第二图像,对所述目标车辆的车牌进行识别,以得到所述目标车辆的车牌信息。
9、该技术方案的有益效果在于:在预设区域内利用第一摄像头在第一时刻和第二时刻先后拍摄两个第一图像;在预设时刻,根据两个第一图像预测目标车辆的位置信息并根据目标车辆的位置信息确定第二摄像头的目标焦距;调整第二摄像头的焦距为目标焦距,在预设时刻利用第二摄像头拍摄目标车辆的第二图像,根据第二图像对目标车辆的车牌进行识别,从而得到目标车辆的车牌信息。利用两个摄像头协同采集第一图像和第二图像,可以协同获取车辆的位置信息和车牌信息,提高了获取的效率,使车辆不用停车拍摄,降低了人力成本,更加智能和便捷;利用两个摄像头采集图像,不需要在每个车辆上安装传感器和采集设备以获取车辆的距离信息,安装费用和设备费用较低,节约了经济成本。可以根据目标车辆的距离信息灵动调节第二摄像头的焦距,可以保证车牌拍摄的精确性、完整性和清晰度,是车牌正确识别的基础。
10、在一些可选的实施方式中,在利用预设区域的第一摄像头在第一时刻和第二时刻先后获取包含目标车辆的两个第一图像之前,所述方法还包括:
11、判断所述第一时刻获取的所述第一图像中是否存在车辆;
12、当存在所述车辆时,获取存在的每个车辆的类型;
13、根据每个车辆的类型,将预设类型的车辆作为所述目标车辆。
14、该技术方案的有益效果在于:判断第一时刻获取的所述第一图像中是否存在车辆,如果第一图像中存在车辆,获取第一时刻获取的第一图像中的每个车辆的类型,判断第一时刻获取的第一图像中的每个车辆的类型是否为预设类型,当一个或多个车辆的类型是预设类型时,分别将每个预设类型的车辆作为目标车辆。基于第一图像对车辆进行类型检测,可以有效检测车辆的类型,确定目标车辆,使后续的识别更有针对性,可以节省计算和识别的资源,使结果更加精确,智能化程度高。
15、在一些可选的实施方式中,所述基于两个所述第一图像预测预设时刻的目标车辆的位置信息,包括:
16、基于所述第一摄像头的视场角和所述第一图像的像素高度,分别获取所述第一图像的每个像素高度对应的视场角;
17、获取所述第一图像的每个像素高度对应的路面位置与预设位置之间的距离,所述预设位置是所述第一摄像头在路面的投影位置;
18、基于所述第一图像的每个像素高度对应的路面位置与预设位置之间的距离,获取每个像素对应的路面距离;
19、基于每个像素对应的路面距离,获取第一预设时长内所述目标车辆的行驶距离;
20、基于所述第一预设时长以及所述第一预设时长内所述目标车辆的行驶距离,获取所述目标车辆的行驶速度;
21、基于所述目标车辆的行驶速度,获取预设时刻的目标车辆的位置信息。
22、该技术方案的有益效果在于:基于第一摄像头的视场角和第一图像的像素高度,获取第一图像的每个像素高度对应的视场角,获取第一图像的每个像素高度对应的路面位置,并根据预设位置,获取第一图像的每个像素高度对应的路面位置与预设位置之间的距离并进一步获取每个像素对应的路面距离;基于每个像素对应的路面距离,在第一预设时长内,获取目标车辆的行驶距离;根据第一预设时长以及第一预设时长内目标车辆的行驶距离,获取目标车辆的行驶速度;基于目标车辆的行驶速度,计算得到预设时刻的目标车辆的位置信息。通过获取第一图像的每个像素高度对应的路面位置与预设位置之间的距离,可以将第一摄像头、第一图像与路面距离统一起来,有利于获取目标车辆的行驶距离和预设时刻的目标车辆的位置信息,化抽象为具体,可以更清晰明了地获取相关的距离参数,准确性较高。
23、在一些可选的实施方式中获取所述第一预设时长的过程包括,包括:
24、基于所述第一摄像头的每秒传输帧数和所述两个第一图像的序列数,计算得到所述第一预设时长。
25、该技术方案的有益效果在于,获取第一摄像头的每秒传输帧数和两个第一图像的序列数(即当图像流中第一图像的数量大于2个时,分别获取两个第一图像在图像流中的序列数,图像流是指按时间顺序排列的数量较多的图像的集合)。利用第一摄像头的每秒传输帧数和两个第一图像的序列数计算获取预设时长的方式,可以避免通过计时的方法获取预设时长时的人为错误,减少误差,提高精确度,计算过程简单方便。
26、在一些可选的实施方式中,所述获取所述预设时长内所述目标车辆的行驶距离,包括:
27、获取所述两个第一图像的车牌检测框的中心像素高度;
28、基于所述两个第一图像的车牌检测框的中心像素高度和所述每个像素对应的距离,计算第二预设时长内所述目标车辆的行驶距离,所述第二预设时长为第一时刻到第二时刻的间隔时长。
29、该技术方案的有益效果在于:在第一图像中获取车牌检测框(用于指示车牌位置的线框)的中心像素高度,取第一时刻到第二时刻的间隔作为第二预设时长,基于两个第一图像的车牌检测框的中心像素高度和每个像素对应的距离,计算第二预设时长内目标车辆的行驶距离。基于两个第一图像的车牌检测框的中心像素高度和每个像素对应的距离,计算得到第二预设时长内目标车辆的行驶距离。化抽象为具体,可以更清晰明了地获取相关的距离参数,准确性较高,更加真实,防止实际测量汽车行驶距离时产生的误差。不用测量汽车行驶距离,减少了人力和时间成本,使操作更加智能化,增加可行性,提高操作效率。
30、在一些可选的实施方式中,所述基于所述预设时刻的所述目标车辆的位置信息,确定第二摄像头的目标焦距,包括:
31、基于所述预设时刻的所述目标车辆的位置信息,获取所述第二摄像头用以清晰拍摄所述预设时刻的所述目标车辆的车牌的焦距作为所述第二摄像头的目标焦距。
32、该技术方案的有益效果在于:根据预设时刻目标车辆的位置信息,调整第二摄像头的焦距为目标焦距,当第二摄像头的焦距等于目标焦距时,第二摄像头可以清晰地拍摄到目标车辆的车牌。根据目标车辆的距离调整第二摄像头的焦距,更加灵活智能,可以保证目标车辆在不停车的情况下其车牌被清晰完整地拍摄到,相比于使用固定焦距的摄像头进行图像采集,这种方法效率更高,成片率更大,更加节省成本。
33、在一些可选的实施方式中,所述基于所述第二图像,对所述目标车辆的车牌进行识别,以得到所述目标车辆的车牌信息,包括:
34、将所述第二图像输入至车牌识别模型,以得到每个所述目标车辆的车牌信息。
35、该技术方案的有益效果在于:通过车牌识别模型对车辆的车牌信息进行识别,可以快速高效地得到大量车辆的车牌信息的识别结果,不需要人工判定,减少了误差,提高了工作的效率,并且可以有效保存模型所输出的识别结果,避免遗漏和丢失。利用车牌识别模型对车牌进行识别的优势是识别过程简单,智能化程度高,识别速度快,识别效率高,所消耗的人力资源少。
36、第二方面,本技术提供了一种电子设备,所述电子设备包括处理器,所述处理器被配置成实现以下步骤:
37、利用预设区域的第一摄像头在第一时刻和第二时刻先后获取包含目标车辆的两个第一图像;
38、基于两个所述第一图像预测预设时刻的目标车辆的位置信息,所述预设时刻是第二时刻之后的时刻;
39、基于所述预设时刻的所述目标车辆的位置信息,确定第二摄像头的目标焦距,所述第二摄像头位于所述第一摄像头远离所述目标车辆的一侧;
40、将所述第二摄像头的焦距调整为所述目标焦距,并在所述预设时刻利用所述第二摄像头获取包含所述目标车辆的第二图像;
41、基于所述第二图像,对所述目标车辆的车牌进行识别,以得到所述目标车辆的车牌信息。
42、在一些可选的实施方式中,在利用预设区域的第一摄像头在第一时刻和第二时刻先后获取包含目标车辆的两个第一图像之前,所述处理器还被配置成实现以下步骤:
43、判断所述第一时刻获取的所述第一图像中是否存在车辆;
44、当存在所述车辆时,获取存在的每个车辆的类型;
45、根据每个车辆的类型,将预设类型的车辆作为所述目标车辆。
46、在一些可选的实施方式中,所述处理器被配置成采用以下方式基于两个所述第一图像预测预设时刻的目标车辆的位置信息:
47、基于所述第一摄像头的视场角和所述第一图像的像素高度,分别获取所述第一图像的每个像素高度对应的视场角;
48、获取所述第一图像的每个像素高度对应的路面位置与预设位置之间的距离,所述预设位置是所述第一摄像头在路面的投影位置;
49、基于所述第一图像的每个像素高度对应的路面位置与预设位置之间的距离,获取每个像素对应的路面距离;
50、基于每个像素对应的路面距离,获取第一预设时长内所述目标车辆的行驶距离;
51、基于所述第一预设时长以及所述第一预设时长内所述目标车辆的行驶距离,获取所述目标车辆的行驶速度;
52、基于所述目标车辆的行驶速度,获取预设时刻的目标车辆的位置信息。
53、在一些可选的实施方式中,所述处理器被配置成采用以下方式获取所述第一预设时长:
54、基于所述第一摄像头的每秒传输帧数和所述两个第一图像的序列数,计算得到所述第一预设时长。
55、在一些可选的实施方式中,所述处理器被配置成采用以下方式获取所述预设时长内所述目标车辆的行驶距离:
56、获取所述两个第一图像的车牌检测框的中心像素高度;
57、基于所述两个第一图像的车牌检测框的中心像素高度和所述每个像素对应的距离,计算第二预设时长内所述目标车辆的行驶距离,所述第二预设时长为第一时刻到第二时刻的间隔时长。
58、在一些可选的实施方式中,所述处理器被配置成采用以下方式确定第二摄像头的目标焦距:
59、基于所述预设时刻的所述目标车辆的位置信息,获取所述第二摄像头用以清晰拍摄所述预设时刻的所述目标车辆的车牌的焦距作为所述第二摄像头的目标焦距。
60、在一些可选的实施方式中,所述处理器被配置成采用以下方式对所述目标车辆的车牌进行识别,以得到所述目标车辆的车牌信息:
61、将所述第二图像输入至车牌识别模型,以得到每个所述目标车辆的车牌信息。
62、第三方面,本技术提供了一种车牌识别系统,所述系统包括:
63、上述电子设备;
64、第一摄像头,用于获取预设区域的第一图像及其采集时刻;
65、第二摄像头,用于分别获取每个车辆的第二图像及其采集时刻,所述第二摄像头的焦距大于所述第一摄像头的焦距。
66、第四方面,本技术提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述任一项方法的步骤。
- 还没有人留言评论。精彩留言会获得点赞!