检测对象的基本数据的方法和设备与流程
检测对象的基本数据的方法和设备
1.本发明涉及检测对象的基本数据(stammdaten)的方法和设备。
2.对象的基本数据主要包括体积和重量。为了检测这些数据,根据现有技术,将对象置于天平上,并用体积记录系统进行测量。为了检测正确的基本数据,到目前为止,对象必须自由地位于天平上,且周围环境中没有外来对象,然后用光学体积检测系统自动进行测量。如果相机的视场中存在外来对象,例如正将对象放置在天平上的人员的手和手臂,则体积检测系统就不能再正确地检测到对象。这也适用于称重过程,在称重过程中,不应接触天平上的对象,以确保重量不被篡改。
3.从metrilus gmbh公司,已知名为s110/120的这种基本数据检测系统。该系统包括用于检测重量的天平和用于确定体积的3d相机以及读码器。如果用读码器识别对象,并且体积检测系统没有检测到外来对象,则3d相机识别天平上的对象并且启动基本数据检测。
4.因此,为了能够测量对象,对象必须自由地(freistellbar)放置在定义的区域内。在这种情况下,“自由地”是指不得与其他对象接触。因此,在测量过程中,通常需要使测量区域完全没有外来对象。这里的外来对象也包括例如从外面伸入到测量区域而与对象不接触的手和其他对象。
5.这样做的缺点是测量过程中增加了工作量,以及由此导致的速度劣势或由于测量外来对象而出现的错误测量。
6.因此,本发明的目的是提供用于检测对象的基本数据的改进方法和新设备,特别地,利用它们可以更快和更可靠地检测基本数据。
7.该目的通过具有权利要求1的特征的方法和具有权利要求4的特征的设备来实现。
8.根据本发明的用于检测对象的基本数据的方法包括以下步骤:
9.将对象置于天平上,
10.通过以下步骤测定用于记录基本数据的启动时间点:
11.用相机记录对象的具有深度值的图像,
12.测定图像中的连续区域,这些连续区域然后形成第一临时对象,将第一临时对象分类为有效类和无效类,其中,将位于图像内部而与图像边缘无接触的所有第一临时对象分类为有效类,而将与边缘有接触的第一临时对象分类为无效类,
13.通过评估深度值并形成具有超过深度值阈值的深度值的新的子区域,分析无效类中的第一临时对象,
14.检查这些子区域以找到连续区域,其中这些连续区域形成第二临时对象,
15.如果第二临时对象与图像边缘不接触,则将该第二临时对象移到有效类,
16.查找有效类中的临时对象与留在无效类中的临时对象的重叠(
ü
berdeckung),其中重叠必须超过重叠阈值,
17.如果有重叠,则将相关的临时对象从有效类移到无效类,
18.将有效类中的临时对象定义为要测量的对象,
19.如果有效类中没有对象,则输出错误信号,否则
20.在以这种方式测定的启动时间点之后,启动对象的体积检测,记录基本数据,
21.存储所记录的基本数据,
22.输出基本数据。
23.通过将外来对象分类为允许的外来对象和不允许的外来对象,现在甚至在外来对象(即,允许的外来对象)位于相机的视野范围内时,也可以进行数据采集。这样增加了吞吐量(durchsatz),因为当手从置于天平上的对象松开但仍然在相机的视场中时,数据检测就已经开始了。
24.通过对外来对象进行分类,也可以更可靠地检测数据。由此,也改进了可能的错误分析。
25.根据本发明方法的有利设计方案在于,在分析第一临时对象以评估深度值并形成具有超过深度值阈值的深度值的新的子区域时,记录和评估深度值直方图。这便于将外来对象分类为允许的外来对象和不允许的外来对象。
26.由于在3d相机中,在图像的区域中时常会出现缺少深度值的情况,并且在存在这种区域的情况下无法进行有意义的评估,因此在本发明的进一步扩展方案中,搜索重叠还包括搜索有效类中的临时对象与缺少深度值的区域的重叠。如果确定有重叠,则将相关的临时对象从有效类移到无效类。
27.在本发明的进一步扩展方案中,如果在评估结束时有效类中没有对象,则输出错误信号是有意义的,这意味着不可能进行基本数据检测。
28.该目的同样由根据本发明的用于检测对象的基本数据的设备来解决,该设备具有以下特征:
29.天平,
30.相机,其用于记录对象图像,
31.评估单元,其具有用于确定对象的体积的体积确定单元,
32.启动器单元,当对象置于天平上时,启动器单元自动测定用于记录与对象体积相关的基本数据的启动时间,
33.存储器,其用于存储所记录的基本数据,
34.输出单元,其用于输出基本数据,
35.其中:
36.启动器单元被设计成根据相机记录的图像测定启动时间点,并且为此目的,启动器单元具有图像评估单元,并且图像评估单元被设计成执行对象分类,通过该对象分类,除了对象之外,外来对象也被识别为允许的外来对象或不允许的外来对象。
37.在第一扩展方案中,启动器单元被设计成尽可能早地输出启动时间点,并且当允许的外来对象仍位于图像区域中时,就已经输出启动时间点了。由此,进一步提高了吞吐量。
38.为了便于分类,相机生成深度值,即记录3d图像,因为这样图像评估单元就可以在对对象进行分类时考虑深度值,这有利于分类。
39.在本发明的扩展方案中,评估单元被设计成如果在等待时间内无法测定出启动时间点,则输出消息,即错误信号。通过这种方式,系统的用户就可以很快地识别出基本数据还没有被检测到。
附图说明
40.下面基于实施例并参考附图详细地阐述了本发明。在附图中:
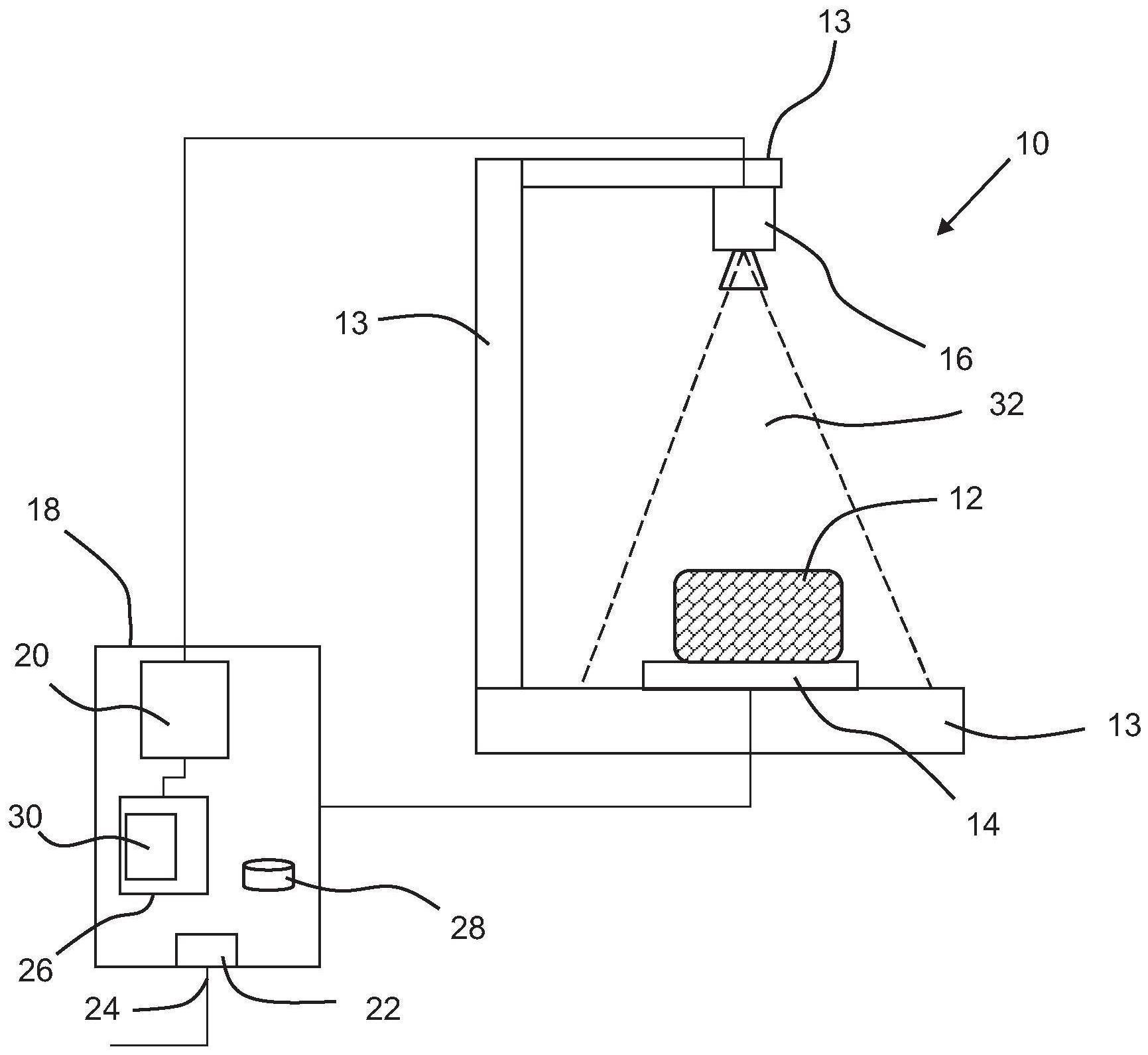
41.图1示出了根据本发明的设备的示意图;
42.图2至图6示出了相机视场的示意性俯视图,其中分别具有处于不同位置的外来对象;
43.图7示出了具有图像缺陷的相机视场的示意性俯视图;
44.图8示出了根据本发明的方法的流程图。
45.根据本发明的设备10用于检测对象12的基本数据。除了机械结构元件13外,设备10还具有天平14、用于记录对象12的图像的相机16和评估单元18。评估单元18具有用于确定对象12的体积的体积确定单元20。使用天平14检测对象12的重量,并使用体积确定单元20检测体积。这样测定的数据最终可以经由输出单元22作为基本数据或至少作为基本数据的一部分被输出到输出端24。存储器28被提供用于存储或缓存所记录的基本数据。
46.评估单元18还包括启动器单元26,当对象12置于相机16的视场32中时,该启动器单元26自动测定用于记录和测定与对象体积有关的基本数据的启动时间点。为此目的,启动器单元26被设计成根据相机16所记录的图像测定启动时间点,并且启动器单元26具有图像评估单元30,其中图像评估单元30被设计成执行对象分类,通过对象分类,除了对象12之外,也将外来对象50分类为允许的外来对象或不允许的外来对象。
47.启动器单元26被设计成尽可能早地输出启动时间点,并且当被分类为允许的外来对象50仍位于相机16的图像区域32时,就已经可以输出启动时间点了。
48.相机16被设计成3d相机,除了具有图像边缘33的2d图像之外,相机还测定每个像素的深度值,从而整体上记录3d图像。
49.在图8中示出了根据本发明方法100的至少一部分的实施方式的流程图,并且下面还参考了图3至图7进行阐述。图3至图7分别示出了从相机16的视角所见的天平14和置于其上的对象12的俯视图。在这些图中,视场32的边缘33示为虚线,在2d图像中是图像边缘33。
50.方法100大部分在启动器单元26中运行,目的是在启动时间点通过启动信号来启动对象12的体积的检测,从而启动基本数据检测。
51.在第一步骤110中,对象置于天平14上。
52.然后,测定启动时间点,在该启动时间点可以给出启动基本数据的记录的启动信号。启动时间点的测定是通过以下步骤完成的。
53.在步骤120中,用相机16记录对象12的具有深度值的图像。
54.在步骤130中,基于深度值,根据图像确定图像中的连续区域。本专利申请意义上的区域可以是图像的单个像素或像素组。这些连续区域形成第一临时对象。例如在图3中,这样连续区域是对象12。在图6中,连续区域将是带手臂的伸入到视场32中的手(即,外来对象50)连同被手部分重叠的对象12。整个图像评估在图像评估单元30中进行。
55.在下一步骤140中,将第一临时对象分类为有效类和无效类,其中位于图像内而与图像边缘33无接触的所有第一临时对象被分类为有效类,而与边缘有接触的第一临时对象被分类为无效类。
56.例如,通过这种方式:
57.在根据图3的情况下,将对象12分类为有效类;
58.在根据图4的情况下,将对象12分类为有效类,而将外来对象50分类为无效类;
59.在根据图5和图6的情况下,分别只有一个第一临时对象,因为外来对象50至少接触到要测量的对象12,二者然后形成了第一临时对象。第一临时对象被分类为无效类。
60.在图7中,示出了不存在外来对象50但在视野范围32中存在没有深度值的区域52的情况。这种特殊的错误情况将在后面加以考虑。
61.在步骤150中,分析已分类为无效类的第一临时对象。在此,对深度值进行评估,并看它们是否超出深度值阈值。如果是这种情况,则这些区域形成新的子区域。在此优选地,为了评估深度值以及为了形成具有超出深度值阈值的深度值的新的子区域,记录深度值直方图并且在评估单元18中评估深度值直方图。
62.在下一步骤中,对子区域进行检查,以确定它们是否连续的,这些连续区域然后形成第二临时对象。通常,深度值直方图中的峰对应于第二临时对象。因此,通过这种方式并且利用深度值直方图,在根据图5和图6的情况下,将对象12和外来对象50分离成两个第二临时对象。
63.在下一步骤170中,检查这些第二临时对象是否与图像边缘33接触。如果第二临时对象与图像边缘33没有接触,则将该第二临时对象从无效类移到有效类。例如,这将是图5中的对象12。
64.因此到目前为止,在根据本发明的方法中发现了被分类为有效类180或无效类190的临时对象。
65.在随后的步骤200中,检查有效类的临时对象与留在无效类中的临时对象是否重叠。在此,如果重叠的面积足够大,即超过重叠阈值,则将重叠视为重叠是有意义的。图6示出了这样的重叠,其中手重叠了对象12的足够大的面积。
66.如果存在重叠,则将先前在有效类(附图标记180)中的相关临时对象从有效类移到无效类(附图标记210)。在图6中所示的情况下,对象12被移动无效类。
67.如果没有重叠,例如在对象12的根据图4和图5的情况下,对象12则保留在有效类中。
68.由于在3d相机中,例如由于有缺陷的像素或评估错误,经常发生在图像的区域中缺少深度值的情况,并且在没有深度值的这种区域52存在时,就无法进行有意义的评估,因此优选地,搜索重叠也包括搜索有效类中的临时对象与缺少深度值的区域52的重叠。如果确定有足够大的重叠,则将相关临时对象从有效类移到无效类。这样的情况在图7中显示。
69.在这些步骤之后,在步骤220中,将留在有效类中的临时对象定义为要测量的对象。
70.这就找到了启动时间点并给出启动信号,然后在步骤230中启动对象12的体积检测(启动时间点)。
71.在体积确定单元20中根据相机16的3d图像计算出体积数据,并且形成基本数据的一部分(该基本数据被收集在存储器28中),然后通过输出单元22和输出端24输出。
72.如果在测定启动时间点时没有对象12留在有效类中,这意味着无法进行基本数据检测,则输出错误信号是合理的。然后,也不会输出启动信号。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1