面向地下快速目标探测的多智能体分布式感知融合系统
本发明涉及多智能体分布式感知融合领域,特别是指一种面向地下快速目标探测的多智能体分布式感知融合系统。
背景技术:
1、近年来,多智能体分布式感知技术受到了极大关注。其旨在借助强化学习算法,通信技术等现代高科技实现对多目标的协同跟踪,合理利用多智能体的自治性、移动性,充分发挥其对复杂环境的自适应性,综合解决多智能体分布式感知目前面临的诸多问题。多智能体应用领域的不断扩展,对分布式感知算法的效率要求越来越高,只有在精准、实时获取数据的前提下,才能确保多智能体能够快速自主适应不同的应用领域。
2、目前的多智能体分布式感知技术涉及智能体对自身状态以及目标状态信息的理解。然而,由于数据采集速度的限制,传统的多智能体分布式感知策略往往忽略对于快速移动目标(简称:快速目标)的探测,已经不能满足地下快速目标的探测。因此,针对快速目标的分布式感知正在被广泛研究。
3、地下快速目标的探测是指相对于普通的目标探测具有更迅速的图像获取能力以及更敏捷的多智能体决策能力。多智能体必须根据弱光照的地下空间环境(包括隐蔽的非生命物体、有生命物体)迅速获取实时的状态空间,做出全局最优策略,避免多智能体的碰撞以及快速目标的袭击。地下快速目标的探测相对于普通移动目标的探测具有更大的状态空间,要设计合理的多智能体分布式感知融合策略,传感器的数据采集效率以及感知数据的高效融合策略是不可忽视的问题。
4、然而,目前大多数传感器数据采集效率较低,采集的图像清晰度不足,存在数据稀疏、采集效率慢、数据结构冗余等问题,这些不足制约了多智能体分布式感知融合策略的精度,进而会降低多智能体完成快速目标探测的效率。
技术实现思路
1、本发明实施例提供了面向地下快速目标探测的多智能体分布式感知融合系统,能够很大程度上提高地下快速目标探测效率。
2、本发明实施例提供的面向地下快速目标探测的多智能体分布式感知融合系统,包括:
3、类复眼数据采集模块,用于利用搭载多类传感器并模仿昆虫视觉系统的多智能体,迅速感知地下空间数据;其中,所述多类传感器包括:惯性传感器、具有复眼镜头的视觉传感器和具有复眼透镜的红外传感器,获取的地下空间数据包括:多智能体的状态以及地下快速目标图像,所述地下快速目标图像包括:视觉图像与红外图像;
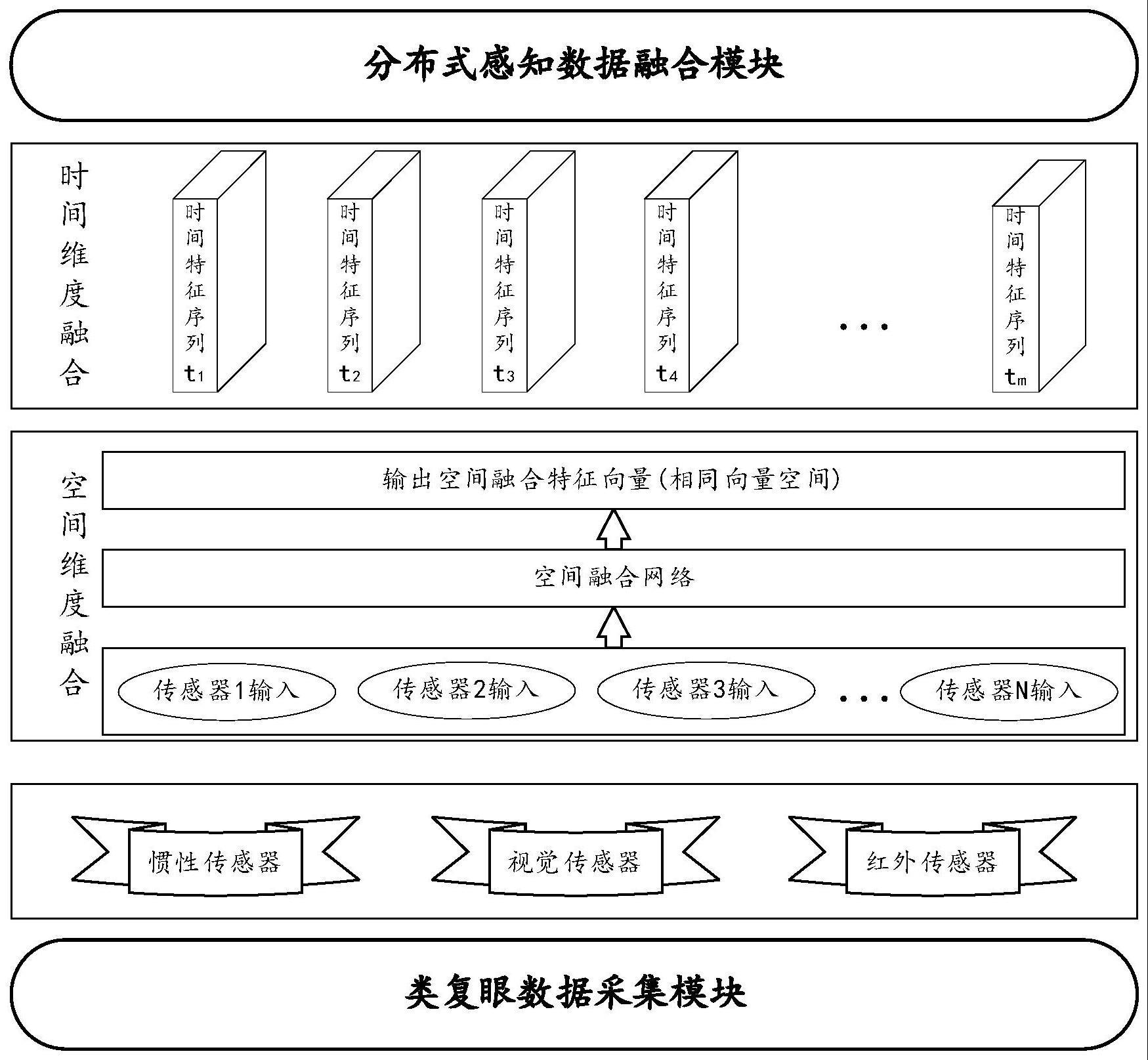
4、分布式感知数据融合模块,用于利用分布式感知数据融合策略对类复眼数据采集模块感知的地下空间数据进行空间维度和时间维度的融合,得到地下快速目标探测的全局信息地图。
5、进一步地,所述惯性传感器,用于获取多智能体的状态,构成惯性数据集;其中,所述多智能体的状态包括:多智能体的加速度和角速度;
6、所述视觉传感器,用于模仿昆虫视觉系统感受地下低强度的光,获取地下快速目标的复眼图像,构成复眼图像集;
7、所述红外传感器,用于将地下空间划分为明区和暗区,获取地下快速目标的红外图像,构成红外图像集。
8、进一步地,所述分布式感知数据融合模块,用于对惯性数据集、复眼图像集和红外图像集分别进行预处理,将预处理后的惯性数据集、复眼图像集和红外图像集输入到空间融合网络融合空间特征后,将不同时间的空间融合网络输出的向量进行时间维度的融合,得到面向地下快速目标探测的多智能体分布式感知地图map。
9、进一步地,所述分布式感知数据融合模块,具体用于采用基于自回归滑动平均模型的多维kalman算法对惯性数据集进行预处理。
10、进一步地,所述分布式感知数据融合模块,具体用于将视觉传感器获取的地下rgb图像转换成hsv图像,实现弱光照的地下rgb图像通过hsv转换后得到低亮度通道图像;通过2个3×3卷积层串联提取低亮度通道图像的特征信息,得到特征l1,将l1输入到增亮残差结构得到残差图像特征l2,将l1与l2融合得到特征l3;其中,特征l1的大小为xl×yl×zl,xl表示特征的宽,yl表示特征的高,zl表示特征的通道数,l1与l2亮度信息不同;将特征l3与l1和l2分别进行特征融合,分别将融合结果输入到增亮残差结构得到特征l4与特征l5;将5个含有不同结构信息与亮度信息的特征l1、l2、l3、l4和l5进行元素相加,再经过卷积层处理后与最初的低亮度通道图像相加,得到最终的增亮型图像。
11、进一步地,所述分布式感知数据融合模块,具体用于根据图像的灰度级进行像素值映射,实现红外图像集的预处理。
12、进一步地,所述空间融合网络包括:第一卷积层、第一注意力模块、第二卷积层、第二注意力模块、第三卷积层和第三注意力模块;
13、所述分布式感知数据融合模块,具体用于利用第一卷积层和第一注意力模块对预处理后的惯性数据集进行处理,得到不同权重的多智能体运动状态集ma1:
14、ma1=x1(e,δ1)
15、其中,x1表示预处理后的惯性数据集与ma1的映射参数,e表示经过预处理后的惯性数据集,δ1表示映射参数x1的训练权重参数;
16、利用第二卷积层和第二注意力模块对预处理后的复眼图像集进行处理,得到不同权重的高分辨率场景集ma2:
17、ma2=x2(f,δ2)
18、其中,x2表示预处理后的复眼图像集与ma2的映射参数,f表示预处理后的复眼图像集,δ2表示映射参数x2的训练权重参数;
19、利用第三卷积层和第三注意力模块对预处理后的红外图像集进行处理,得到不同权重的高清红外成像集ma3:
20、ma3=x3(g,δ3)
21、其中,x3表示预处理后的红外图像集与ma3的映射参数,g表示预处理后的红外数据集,δ3表示映射参数x3的训练权重参数;
22、根据得到的不同权重的多智能体运动状态集、高分辨率场景集和高清红外成像集融合空间特征,得到空间融合特征向量sf。
23、进一步地,空间融合特征向量sf表示为:
24、sf=ω1·ma1+ω2·ma2+ω3·ma3
25、其中,ω1为ma1对空间融合特征向量sf的权重系数;ω2为ma2对空间融合特征向量sf的权重系数;ω3为ma3对空间融合特征向量sf的权重系数。
26、进一步地,所述分布式感知数据融合模块,具体用于将不同时间的空间融合网络输出的空间融合特征向量sf进行融合,得到面向地下快速目标探测的多智能体分布式感知地图map:
27、
28、其中,sf1,sf2,...sfm为m个时刻的空间融合特征向量,对应的时间为t1,t2,...,tm,t1<t2<…<tm;zi表示第i个时刻的权重,每个时刻的权重与当前时间的指数函数成正比,即a为常数,用于控制权重的下降速度。
29、本发明实施例提供的技术方案带来的有益效果至少包括:
30、1、本实施例所提的类复眼数据采集方案,具有快速、视角广的优点,使分布式多智能体能灵敏迅速探测到快速移动目标,提高了多智能体自主适应复杂、弱光照地下环境的能力,更加适用于弱光照的地下快速目标探测场景。
31、2、本实施例所提的分布式感知数据融合策略,能够对传感器迅速捕捉到的低分辨图像进行处理,提取有效特征得到高分辨率图像并解决因地下弱光照造成的图像色彩饱和度低、细节缺失等难题,对获取丰富的高清地下空间信息提供了极大帮助,具有精度高、信息获取快、适用性广等优点;
32、3、本实施例所提的分布式感知数据融合策略,将不同权重的多智能体运动状态集、高分辨率场景集和高清红外成像集进行空间维度和时间维度的融合,有效提高了地下快速目标的探测效率。
- 还没有人留言评论。精彩留言会获得点赞!