基于高斯过程的海缆铺设水下机器人抗水流扰动方法和系统
本发明涉及机器人控制,具体地是一种水下机器人在海底电缆铺设时跟踪铺设路径的水流扰动控制方法。
背景技术:
1、随着科学进步,水下机器人的发展为高度危险、人员无法长时间执行等领域的自动化维修技术的进步奠定了基础。海底电缆也常称为海缆,包括铺设在海底用加强保护套包裹的电缆,光缆和光电复合缆,在电能传输,跨海通信和海洋工程等领域具有其他手段无法替代的优势。但是海底环境中可能存在恒流和湍流等不确定干扰,这些干扰容易造成水下机器人的铺缆姿态不稳定、无法达到理想的移动速度等问题,这些均会降低海缆的铺设质量甚至对造成海缆损坏。目前主流抗干扰控制算法有如下几种:
2、(1)自适应控制
3、自适应控制方法会根据实际系统的状态误差反馈,实时调整水下机器人的控制器的参数,使水下机器人的控制器在当前环境下达到最优的控制效果。这种方法对环境的变化具有较强的适应能力。但是这种方法对环境中的不确定扰动容错率较低,当环境中存在不确定扰动时,这种方法易受扰动影响导致优化方向错误,使水下机器人与预设路径之间的误差越来越大。
4、(2)自抗扰控制
5、自抗扰控制主要通过设计水下机器人状态观测器估计总扰动,在现有的pid算法下加入过渡过程。这种方法具有抗干扰能力强且不依赖精确系统模型的特点。但是这种方法在遇到复杂系统时,需要调整的参数过多,而水下机器人(autonomous underwatervehicle,auv)的工作环境主要在水下,不适合频繁的对参数进行调整和实验。
6、(3)机器学习
7、机器学习是目前最常见的干扰估计方法。这种方法首先对干扰建立神经网络模型,然后通过大量的训练数据逐步优化网络模型参数,最后将每个控制时刻将机器人的位姿信息作为网络的输入,网络模型的输出用于控制器的补偿和优化。但是由于海缆铺设所在水下环境复杂,水流中含有较小部分湍流,这部分湍流使得水流推力方向多变,样本中含有不确定分量,从而导致上述方法学习效率低,准确性不高。
8、为保证缆线的铺设质量,水下机器人需要保证自身的姿态可以稳定在一定范围内。上述方法虽然在一定程度上均能抑制外界环境的干扰,但是因为水下环境较为复杂,训练样本中存在少量的随机变化,这导致算法的学习效率较低甚至导致优化方向错误,与期望状态的误差越来越大。
技术实现思路
1、发明目的:针对现有技术中存在的问题,本发明提供一种基于高斯过程的海缆铺设水下机器人抗水流扰动方法,该方法根据水流扰动对控制输入进行补偿,从而减少水下机器人姿态和移动速度的误差,提高缆线铺设质量。
2、技术方案:本发明一方面公开了一种基于高斯过程的海缆铺设水下机器人抗水流扰动方法,包括步骤:
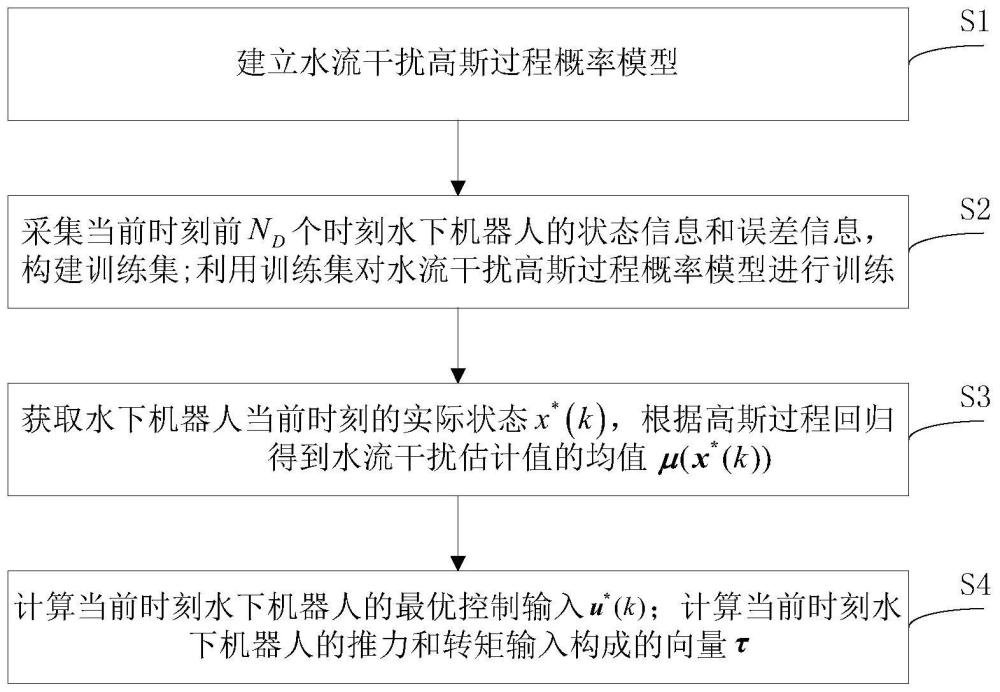
3、s1、建立水流干扰高斯过程概率模型:
4、
5、其中x(k)为k时刻海缆铺设水下机器人在水流干扰下状态变量,n为x(k)的维度,e(x(k))为k时刻海缆铺设水下机器人在水流干扰下实际状态与期望状态的干扰误差,e(x(k))=f(x(k))+ε,f(x(k))为水流干扰中的恒流分量,其高斯过程概率函数为:ε为水流干扰中的随机分量,模型为:σn为ε的方差;μ(x(k))为e(x(k))关于状态变量x(k)的均值函数,k(x(k),x(k)t为水流干扰的协方差函数,表示高斯过程,μm(x(k))为μ(x(k))的第m个分量,km(x(k),x(k)t)为k(x(k),x(k)t的第m个分量,m为区间[1,n]内的整数;
6、s2、采集当前时刻k前nd个时刻水下机器人的状态信息x和误差信息y,构建训练集;
7、
8、x(k-i)为当前时刻k前i个时刻水下机器人的状态,e(x(k-i))为当前时刻k前i个时刻水下机器人实际状态与期望状态的干扰误差;i=1,2,…,nd;
9、利用训练集对s1建立的水流干扰高斯过程概率模型进行训练,获取训练集误差信息y关于状态信息x的均值μd(x(k));
10、s3、获取水下机器人当前时刻的实际状态x*(k),根据高斯过程回归得到水流干扰估计值的均值μ(x*(k));
11、s4、根据水流干扰估计值的均值计算当前时刻k水下机器人的最优控制输入u*(k);根据u*(k)计算当前时刻k水下机器人的推力和转矩输入构成的向量τ。
12、进一步地,k时刻海缆铺设水下机器人在水流干扰下状态变量x(k)为k时刻水下机器人位姿η(k)和移动速度v(k)组成的n维向量,x(k)=[η(k) v(k)]t;
13、其中px,py,pz分别为水下机器人的纵向位移、横向位移、垂向位移,分别为横滚角、俯仰角、航向角;v(k)=[u,v,w,p,q,r],u,v,w分别为纵向移动速度、横向移动速度、垂向移动速度,p,q,r分别为横滚角转速、俯仰角转速、航向角转速。
14、进一步地,所述步骤s3中水流干扰估计值的均值μ(x*(k))的计算步骤为:
15、s31、计算水流干扰估计值e(x*(k))的每个分量的均值,第m个分量的均值μm(x*(k))为:
16、其中km(x*(k),x)为水下机器人当前时刻的实际状态x*(k)与训练集中状态信息x的协方差矩阵的第m个分量,km(x,x)为训练集中状态信息x的协方差矩阵的第m个分量,为nd×nd的单位矩阵;为训练集误差信息y的第m列,为训练集误差信息y关于状态信息x的均值μd(x(k))的第m列;
17、s32、水流干扰估计值的均值μ(x*(k))为:
18、
19、进一步地,所述步骤s4中当前时刻k水下机器人的最优控制输入u*(k)为:
20、
21、其中ud(k)为补偿前的控制输入,ud(k)=v(k+1)-v(k),v(k)为当前时刻k水下机器人的移动速度;
22、当前时刻k水下机器人的推力和转矩输入构成的向量τ为:
23、τ=u*(k)+m-1c(v(k))v(k)+m-1d(v(k))v(k)+m-1g(η(k))
24、其中m是刚体和附加质量引起的惯性矩阵;c(v(k))是科里奥利力矩阵;d(v(k))是流体阻尼矩阵;g(η(k))是重力和浮力产生的恢复力向量。
25、另一方面,本发明还公开了实现上述基于高斯过程的海缆铺设水下机器人抗水流扰动方法的系统,包括:
26、水流干扰高斯过程概率模型建立模块1,用于建立水流干扰高斯过程概率模型:
27、
28、其中x(k)为k时刻海缆铺设水下机器人在水流干扰下状态变量,n为x(k)的维度,e(x(k))为k时刻海缆铺设水下机器人在水流干扰下实际状态与期望状态的干扰误差,e(x(k))=f(x(k))+ε,f(x(k))为水流干扰中的恒流分量,其高斯过程概率函数为:ε为水流干扰中的随机分量,模型为:σn为ε的方差;μ(x(k))为e(x(k))关于状态变量x(k)的均值函数,k(x(k),x(k)t为水流干扰的协方差函数,表示高斯过程,μm(x(k))为μ(x(k))的第m个分量,km(x(k),x(k)t)为k(x(k),x(k)t的第m个分量,m为区间[1,n]内的整数;
29、训练集建立模块2,用于采集当前时刻k前nd个时刻水下机器人的状态信息x和误差信息y,构建训练集;
30、
31、x(k-i)为当前时刻k前i个时刻水下机器人的状态,e(x(k-i))为当前时刻k前i个时刻水下机器人实际状态与期望状态的干扰误差;i=1,2,…,nd;
32、利用训练集对s1建立的水流干扰高斯过程概率模型进行训练,获取训练集误差信息y关于状态信息x的均值μd(x(k));
33、水流干扰估计模块3,用于获取水下机器人当前时刻的实际状态x*(k),根据高斯过程回归得到水流干扰估计值的均值μ(x*(k));
34、水流干扰补偿模块4,用于根据水流干扰估计值的均值计算当前时刻k水下机器人的最优控制输入u*(k);根据u*(k)计算当前时刻k水下机器人的推力和转矩输入构成的向量τ。
35、另一方面,本发明还公开了一种计算机存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述海缆铺设水下机器人抗水流扰动方法的步骤。
36、另一方面,本发明还公开了一种海缆铺设水下机器人抗水流扰动设备,其包括:
37、存储器,其上存储有计算机程序;
38、处理器,用于执行所述存储器中的所述计算机程序,以实现上述海缆铺设水下机器人抗水流扰动方法的步骤。
39、有益效果:本发明公开的海缆铺设水下机器人抗水流扰动方法和系统采用高斯过程表示水流干扰与水下机器人的关系,以概率模型的方式建立水流干扰模型,有效减小样本中随机分量对预测准确度的影响;以基于高斯过程的水流干扰建模方式表达水流干扰与水下机器人之间的非线性复杂关系。该方法和系统能够对水流扰动进行精确估计,进而根据水流扰动对控制输入进行补偿,从而减少水下机器人姿态和移动速度的误差,提高缆线铺设质量。
- 还没有人留言评论。精彩留言会获得点赞!