一种水锤防护设备的结构尺寸精准确定方法与流程
本发明涉及一种水锤防护设备的结构尺寸精准确定方法,特别是涉及一种基于虚拟水位思想的水锤防护设备结构尺寸精准确定方法,所述水锤防护设备包括水锤消除箱,及其它带空气阀的、气液两相的水锤防护装置。
背景技术:
1、随着我国城市化进程的加快,通过跨地区、跨流域的调水工程解决城市用水是一种必然的发展趋势。调水工程输水管线距离长,且容易受到多种因素的影响,呈现出起伏变化复杂的显著特点,很容易造成水锤事故,出现吸气、水柱分离、断流弥合水锤等现象,严重威胁整个系统的安全运行。实际工程中通常采用水锤防护设备来保障输水系统的安全。
2、水锤消除箱作为一种水锤防护设备,在发生负水锤时,通过连接管向供水管道补水,同时空气阀向消除箱补气形成气垫,有效防止水柱分离;在发生正水锤时,供水管道中的水回流至消除箱,同时空气阀向外排气,对正水锤进行防护。该设备不依赖机械部件,性能可靠,同时箱内水体自动更新,可有效防冻。另外,水锤消除箱的价格优势明显,适用于大型输水工程水锤防护。
3、采用水锤消除箱进行水锤防护时,需要合理确定消除箱结构尺寸。若消除箱尺寸较小,无法起到防护水锤作用,尺寸较大则会导致造价升高。一般采用数值计算的方法来确定结构的尺寸参数。
4、水锤消除箱内的流动涉及到单相流动与气液两相流动间的相互转换,且空气阀、消除箱、连接管与供水管道相互作用,数学模型复杂,程序编制困难,目前尚无针对此问题的计算方法,因此水锤消除箱的结构参数难以明确。
技术实现思路
1、本发明的目的是提供一种水锤防护设备的结构尺寸精准确定方法,在保证消除箱水锤防护功能的同时减小消除箱体积。为此,本发明采用以下技术方案:
2、一种水锤防护设备的结构尺寸精准确定方法,其特征在于,包括以下步骤:
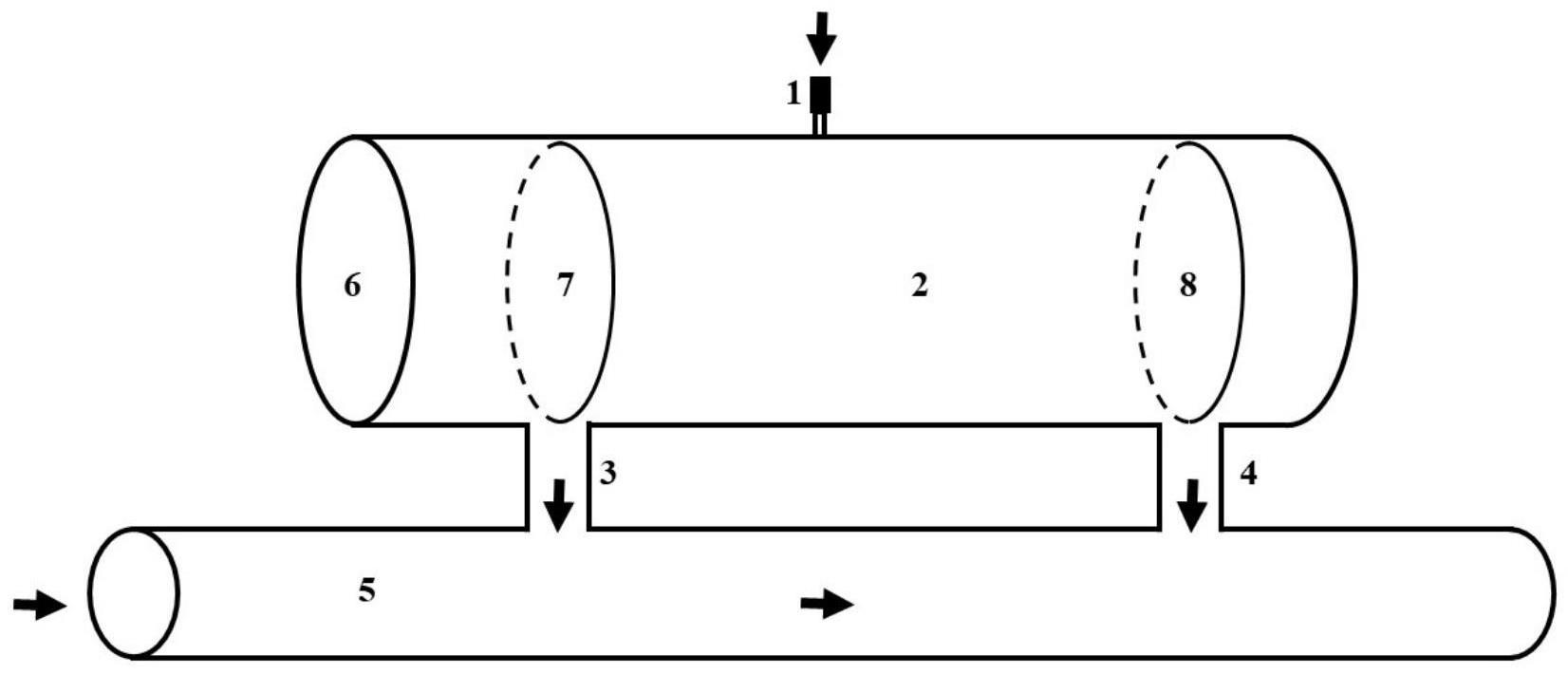
3、步骤1,初定水锤消除箱各项尺寸参数,包括水锤消除箱长度、水锤消除箱横截面积、水锤消除箱高度,并确定水锤消除箱流动特性参数,包括轴向流动损失系数、前连接管损失系数、后连接管损失系数、流入空气阀的开启面积及流量系数、流出空气阀的开启面积及流量系数、前连接管和后连接管间供水管道的损失系数、两连接管间供水管道的长度及损失系数,其中,前连接管和后连接管均连接在水锤消除箱和供水管道之间,且前连接管位于后连接管的上游;
4、步骤2,将水锤消除箱内的水体流动简化为一维流动,形成水锤消除箱两节点数学模型,其中,水锤消除箱两个连接管与供水管道交汇位置为水锤消除箱的两个节点;
5、步骤3,进行水锤消除箱初始值计算;
6、步骤4,进行水锤消除箱瞬变过程求解;
7、步骤5,若供水系统沿程最低压力hmin与系统压力控制值hc不满足0<hmin-hc<阈值,则修改水锤消除箱体积,重复步骤2~4,直到0<hmin-hc<阈值。
8、进一步的,所述方法还包括步骤6:将所得参数应用于水锤消除箱体积设置。
9、在采用上述技术方案的基础上,本发明还可采用以下进一步的技术方案,或对这些进一步的技术方案组合使用:
10、步骤2所述建立水锤消除箱的数学模型的具体步骤包括:
11、步骤2.1,引入虚拟水位概念,水锤消除箱前连接管所在断面a1对应的虚拟水位:hl1=hn1+kw1qw1|qw1|+hatm-ha;水锤消除箱后连接管所在断面a2对应的虚拟水位:hl2=hn2+kw2qw2|qw2|+hatm-ha;
12、式中,kw1和kw2分别为前连接管和后连接管的损失系数,hn1为前连接管与供水管道交汇处节点压力,hn2为后连接管与供水管道交汇处节点压力,ha为气垫压力,hatm为大气压力,qw1和qw2分别为前连接管和后连接管的流量;
13、步骤2.2,根据连续性方程,前连接管和后连接管的流量满足
14、
15、式中,va为气垫体积;
16、步骤2.3,根据水锤消除箱内水体流动所需满足的能量方程,得到虚拟水位与连接管流量之间的关系
17、
18、式中,aw1和aw2分别为断面a1和断面a2的过水断面面积,hw为水头损失,hm为惯性水头;
19、步骤2.4,根据能量方程,得到前连接管和后连接管间供水管道的流量与节点压力之间的关系
20、
21、式中,kp为前连接管和后连接管间的供水管道的损失系数,l为前连接管和后连接管之间的供水管道长度,a为供水管道截面积,q为前连接管和后连接管间的供水管道的流量。
22、步骤3所述水锤消除箱初始值计算具体步骤如下:
23、初始状态下,水锤消除箱内流动为单相流状态,满足如下关系:
24、气垫体积va=0
25、气垫压力ha=hatm
26、水锤消除箱水头损失hw=kwqw2|qw2|,kw为水锤消除箱满流状态下水体轴向流动损失系数;
27、水锤消除箱惯性水头hm=0
28、供水管道流量变化率
29、将以上关系带入步骤2中的数学模型,采用牛顿迭代法进行求解。
30、步骤4所述瞬变过程求解具体步骤如下:
31、步骤4.1,引入虚拟水位求解中间变量hl10、hl20,二者分别等于上一时刻的虚拟水位hl1(n-1)、hl2(n-1);
32、步骤4.2,若满足hl10≥zt且hl20≥zt,式中zt为箱体高度,则假定当前时刻为单相流,进入步骤4.3,否则为两相流,进入步骤4.4;
33、步骤4.3,单相流条件下,气垫体积、水锤消除箱水头损失及惯性水头满足如下关系:
34、气垫体积va=0
35、气垫压力ha=hatm
36、水锤消除箱水头损失hw=kwqw2|qw2|,kw为水锤消除箱满流状态下水体轴向流动损失系数;
37、水锤消除箱惯性水头lw为水锤消除箱长度,aw为水锤消除箱截面积;
38、将上述关系带入步骤2中的数学模型,采用牛顿迭代法进行求解;
39、步骤4.4,两相流条件下,气垫体积、水锤消除箱水头损失及惯性水头满足如下关系:
40、气垫体积va=v-∑awiδx
41、将水锤消除箱沿轴线方向等分若干段,上式中awi为各断面过水断面面积,δx为分段间隔,v为水锤消除箱体积;
42、水锤消除箱水头损失hw=∑kwiqwi|qwi|
43、式中,qwi为水锤消除箱各断面水的流量,kwi为明流状态下各断面水体流动损失系数;
44、水锤消除箱惯性水头
45、空气阀质量流量与气垫压力满足如下关系:
46、
47、式中,为空气阀质量流量,以向内进气为正;ci为流入空气阀流量系数,ai为流入空气阀的开启面积;co为流出空气阀流量系数,ao为流出空气阀的开启面积;ρw为水的密度,ρ0为空气在常温常压下的密度,r为气体常数,t为温度;
48、水锤消除箱内气垫压力与气垫体积满足如下关系
49、
50、式中,a和b分别为范德华常量,m为空气的摩尔质量;
51、将上述关系带入步骤2中的数学模型,采用牛顿迭代法进行求解;
52、步骤4.5,若求得的虚拟水位hl1、hl2满足(hl10-zt)(hl1-zt)≥0且(hl20-zt)(hl2-zt)≥0,则计算结束,否则令hl10=hl1,hl20=hl2,重复步骤4.2~4.5;
53、步骤4.6,求解箱内任一断面底端水体压力:
54、
55、式中,l为断面距消除箱前壁距离;l1、l2分别为断面a1、断面a2距消除箱前壁距离。
56、若当前时刻虚拟水位hl1、hl2满足hl1<zt或hl2<zt,求解箱内任一断面水深:
57、
58、步骤4.7,若当前时刻大于等于瞬变过程计算时长,则计算结束,否则重复步骤4.1~4.6。
59、其中,步骤5中的所述阈值优选为1m。
60、本发明提出了新型水锤消除箱结构尺寸精准确定方法。
61、本发明提出了“虚拟水位”思想,认为水锤消除箱顶部存在截面积远远小于箱体横截面积、高度无限向上延伸的窄槽,窄槽壁面光滑,无损失,窄槽顶部为空气阀。这样,将单相流状态下水锤消除箱两节点的压力等效为窄槽水位。基于对断面a1和断面a2虚拟水位的构建,实现了单相流与两相流模数学模型的统一。另外,通过引入虚拟水位,提出了单相流与双相流的转换条件。
62、本发明提出了新型水锤消除箱结构尺寸精准确定方法,通过水锤消除箱内流体运动的数值计算结果,确定消除箱结构尺寸。采用水锤消除箱进行输水系统水锤防护时,可根据本发明的计算结果形成有效的防护方案。
63、本发明提出了虚拟水位,实现了单相流与双相流数学模型的统一,降低了编程计算的难度,提高了代码运行效率。另外,单相流与双相流的转换条件可直接用虚拟水位的形式表达,避免了繁琐的条件判断,提高了模型编程开发效率。
- 还没有人留言评论。精彩留言会获得点赞!