一种多源异构的图像数据分类治理方法与流程
本技术涉及基于特定计算机系统的图像处理,尤其涉及一种多源异构的图像数据分类治理方法。
背景技术:
1、基于图像处理的服务技术飞速发展,为人们的生活提供较大的便利。为实现相应的服务目标,服务提供商投放了大量的图像采集设备用以执行图像的采集。随之而来的是产生了大量的、无用的“垃圾”图像。这些“垃圾”图像一方面占用了图像采集设备提供的图像采集资源,造成了资源浪费;另一方面,后续对这些“垃圾”图像的处理还会进一步地占用图像处理资源。
2、如何能够将有用的图像和无用的图像区分开来,成为亟待解决的问题。
技术实现思路
1、本技术实施例提供了一种多源异构的图像数据分类治理方法,以至少部分的解决上述技术问题。
2、本技术实施例采用下述技术方案:
3、第一方面,本技术实施例提供一种多源异构的图像数据分类治理方法,所述方法基于图像数据处理系统,所述图像数据处理系统包括:云端设备和与所述云端设备通信连接的若干个本地设备,所述本地设备一一对应地设置在车辆上,所述方法由所述云端设备执行,所述方法包括:
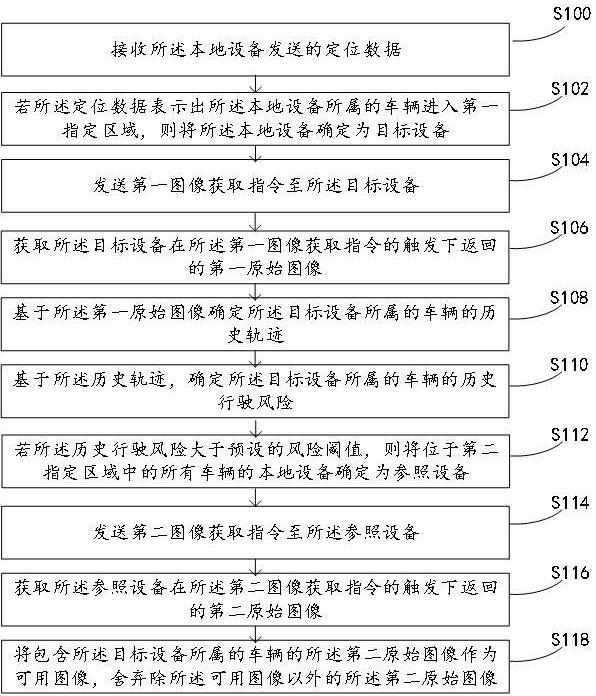
4、接收所述本地设备发送的定位数据;
5、若所述定位数据表示出所述本地设备所属的车辆进入第一指定区域,则将所述本地设备确定为目标设备;其中,所述第一指定区域包括:高架桥、立交桥、盘山道、以及隧道中的至少一种;
6、发送第一图像获取指令至所述目标设备;
7、获取所述目标设备在所述第一图像获取指令的触发下返回的第一原始图像;其中,所述第一原始图像包括:位图、矢量图、以及点云图中的至少一种;所述第一原始图像是距当前时刻指定时长的历史时间段内所述目标设备所属的车辆采集的;
8、基于所述第一原始图像确定所述目标设备所属的车辆的历史轨迹;
9、基于所述历史轨迹,确定所述目标设备所属的车辆的历史行驶风险;其中,所述历史行驶风险与按照所述历史轨迹行驶时可能出现事故的概率正相关;
10、若所述历史行驶风险大于预设的风险阈值,则将位于第二指定区域中的所有车辆的本地设备确定为参照设备;其中,所述第二指定区域是将所述第一指定区域沿径向向外侧偏置指定距离得到的;所述指定距离与所述参照设备所属的车辆的行驶速度负相关、且位于所述目标设备所属的车辆行驶方向前侧的车辆的指定距离大于位于所述目标设备所属的车辆行驶方向后侧的车辆的指定距离;
11、发送第二图像获取指令至所述参照设备;
12、获取所述参照设备在所述第二图像获取指令的触发下返回的第二原始图像;其中,所述第二原始图像是当前时刻之后、所述参照设备在位于所述第二指定区域内时采集的图像;
13、将包含所述目标设备所属的车辆的所述第二原始图像作为可用图像,舍弃除所述可用图像以外的所述第二原始图像。
14、在本说明书一个可选的实施例中,所述方法还包括:
15、所述指定时长与所述目标设备所属的车辆的行驶速度负相关、与所述目标设备所属的车辆持续处于行驶状态的时长正相关、且与所述目标设备所属的车辆本次行驶过程中检测到的风险驾驶行为的次数正相关。
16、在本说明书一个可选的实施例中,所述方法还包括:
17、所述风险阈值与所述第一指定区域内的车辆的数量负相关、且与所述目标设备所属的车辆的行驶速度负相关。
18、在本说明书一个可选的实施例中,所述方法还包括:
19、基于所述可用图像对所述第一指定区域内车辆的行驶状况进行监控。
20、在本说明书一个可选的实施例中,所述图像数据处理系统还包括路侧设备;所述路侧设备设置于所述第一指定区域的路侧,所述路侧设备用于图像采集,所述云端设备与所述路侧设备通信连接;基于所述可用图像对所述第一指定区域内车辆的行驶状况进行监控,包括:
21、若所述历史行驶风险大于所述风险阈值,且所述第一指定区域内的目标车辆不唯一,则基于所述路侧设备采集的第三原始图像和/或所述可用图像,建立行驶环境三维模型;其中,所述行驶环境三维模型包含所述第一指定区域内的车辆以及道路;所述目标车辆是设置有所述目标设备的车辆;
22、基于所述行驶环境三维模型对所述第一指定区域内车辆的行驶状况进行监控。
23、在本说明书一个可选的实施例中,基于所述路侧设备采集的第三原始图像和/或所述可用图像,建立行驶环境三维模型,包括:
24、在所述参照设备的数量大于预设的指定数量时,基于所述路侧设备采集的第三原始图像和所述可用图像,建立行驶环境三维模型;
25、在所述参照设备的数量不大于所述指定数量时,基于所述路侧设备采集的第三原始图像,建立行驶环境三维模型。
26、在本说明书一个可选的实施例中,所述方法还包括以下至少一项:
27、所述本地设备是所述车辆的车机;
28、所述指定数量与所述目标车辆的行驶速度负相关。
29、第二方面,本技术实施例还提供一种多源异构的图像数据分类治理系统,所述系统包括:
30、云端设备和与所述云端设备通信连接的若干个本地设备,所述本地设备一一对应地设置在车辆上;所述云端设备包括:
31、第一接收模块,配置为:接收所述本地设备发送的定位数据;
32、目标设备确定模块,配置为:若所述定位数据表示出所述本地设备所属的车辆进入第一指定区域,则将所述本地设备确定为目标设备;其中,所述第一指定区域包括:高架桥、立交桥、盘山道、以及隧道中的至少一种;
33、第一发送模块,配置为:发送第一图像获取指令至所述目标设备;
34、第一图像获取模块,配置为:获取所述目标设备在所述第一图像获取指令的触发下返回的第一原始图像;其中,所述第一原始图像包括:位图、矢量图、以及点云图中的至少一种;所述第一原始图像是距当前时刻指定时长的历史时间段内所述目标设备所属的车辆采集的;
35、历史轨迹确定模块,配置为:基于所述第一原始图像确定所述目标设备所属的车辆的历史轨迹;
36、风险确定模块,配置为:基于所述历史轨迹,确定所述目标设备所属的车辆的历史行驶风险;其中,所述历史行驶风险与按照所述历史轨迹行驶时可能出现事故的概率正相关;
37、参照设备确定模块,配置为:若所述历史行驶风险大于预设的风险阈值,则将位于第二指定区域中的所有车辆的本地设备确定为参照设备;其中,所述第二指定区域是将所述第一指定区域沿径向向外侧偏置指定距离得到的;所述指定距离与所述参照设备所属的车辆的行驶速度负相关、且位于所述目标设备所属的车辆行驶方向前侧的车辆的指定距离大于位于所述目标设备所属的车辆行驶方向后侧的车辆的指定距离;
38、第二发送模块,配置为:发送第二图像获取指令至所述参照设备;
39、第二图像获取模块,配置为:获取所述参照设备在所述第二图像获取指令的触发下返回的第二原始图像;其中,所述第二原始图像是当前时刻之后、所述参照设备在位于所述第二指定区域内时采集的图像;
40、分类模块,配置为:将包含所述目标设备所属的车辆的所述第二原始图像作为可用图像,舍弃除所述可用图像以外的所述第二原始图像。
41、第三方面,本技术实施例还提供一种电子设备,包括:
42、处理器;以及
43、被安排成存储计算机可执行指令的存储器,所述可执行指令在被执行时使所述处理器执行第一方面所述的方法步骤。
44、第四方面,本技术实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储一个或多个程序,所述一个或多个程序当被包括多个应用程序的电子设备执行时,使得所述电子设备执行第一方面所述的方法步骤。
45、本技术实施例采用的上述至少一个技术方案能够达到以下有益效果:
46、本说明书的方法着眼于第一指定区域可能存在风险的车辆,第一指定区域是gps数据出现误差的概率较大的区域,则基于gps数据进行的路径规划、自动驾驶都有可能由于该误差出现风险事故,对第一指定区域进行有针对性的关注,而对除第一指定区域以外的其他区域则无需过多的关注,一方面为高风险车辆的行驶风险的预测提供了条件,另一方面,无需对第一指定区域以外区域过多的关注,有利于节约图像采集资源。此外,本说明书中的方法在对高风险的车辆进行考察时,并非将周围环境中的所有车辆采集的图像作为考察依据,而是将第二指定区域内的车辆采集的图像作为考察依据,进一步缩减了需要处理的图像的量。可见,本说明书中的方法从图像的来源、分析对象等方面,对需要处理的图像的量进行了缩减,有利于资源的节约。
- 还没有人留言评论。精彩留言会获得点赞!