目标检测方法、装置、计算设备和存储介质与流程
本发明涉及计算机领域,特别涉及一种目标检测方法、装置、计算设备和存储介质。
背景技术:
1、在自主移动机器人的实时避障和路径规划过程中,机器人须依赖于外部环境信息的获取,感知障碍物的存在,测量障碍物的距离。目前,机器人避障和测距传感器有红外、超声波、激光及视觉传感器等多种不同类型的传感器。
2、由于不同的传感器分别完成各自感知任务,并且不同的传感器有各自优缺点,单独处理各个传感器数据容易消耗大量计算资源,而人工对数据处理之后采取识别结果的后融合又会使传感器捕捉的绝大部分信息丢失,因此亟需一种处理方法,提高机器人避障检测的准确性并降低成本。
技术实现思路
1、有鉴于此,本发明实施例提供了一种目标检测方法。本发明同时涉及一种目标检测装置、一种计算设备,以及一种计算机可读存储介质,以解决现有技术中存在的技术缺陷。
2、根据本说明书实施例的第一方面,提供了一种目标检测方法,应用于机器人,其中,机器人包括视觉传感器和测距传感器,该方法包括:
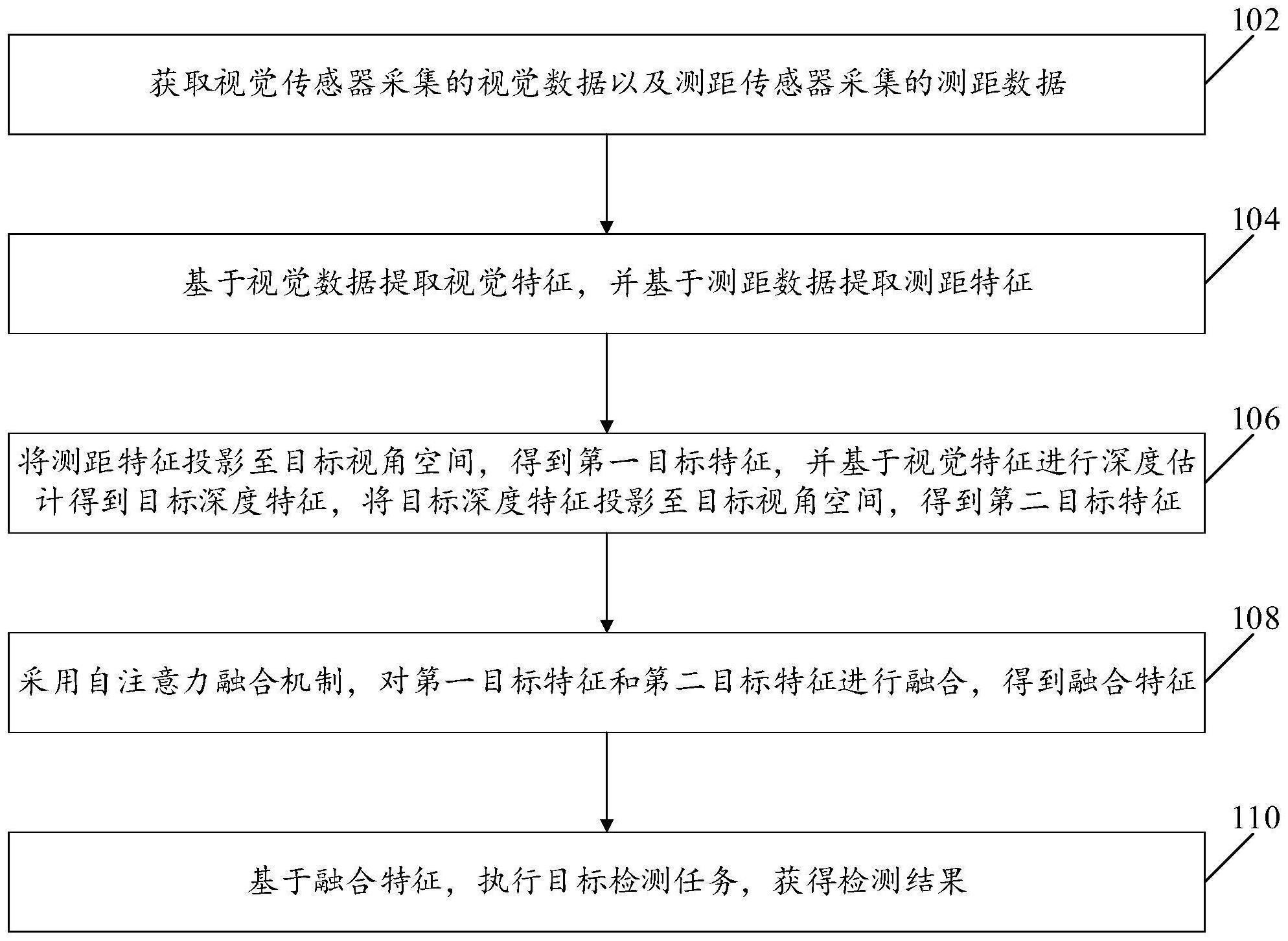
3、获取视觉传感器采集的视觉数据以及测距传感器采集的测距数据;
4、基于视觉数据提取视觉特征,并基于测距数据提取测距特征;
5、将测距特征投影至目标视角空间,得到第一目标特征,并基于视觉特征进行深度估计得到目标深度特征,将目标深度特征投影至目标视角空间,得到第二目标特征;
6、采用自注意力融合机制,对第一目标特征和第二目标特征进行融合,得到融合特征;
7、基于融合特征,执行目标检测任务,获得检测结果。
8、根据本发明实施例的第二方面,提供了一种目标检测装置,配置于机器人,其中,机器人包括视觉传感器和测距传感器,该装置包括:
9、获取模块,被配置为获取视觉传感器采集的视觉数据以及测距传感器采集的测距数据;
10、提取模块,被配置为基于视觉数据提取视觉特征,并基于测距数据提取测距特征;
11、投影模块,被配置为将测距特征投影至目标视角空间,得到第一目标特征,并基于视觉特征进行深度估计得到目标深度特征,将目标深度特征投影至目标视角空间,得到第二目标特征;
12、融合模块,被配置为采用自注意力融合机制,对第一目标特征和第二目标特征进行融合,得到融合特征;
13、检测模块,被配置为基于融合特征,执行目标检测任务,获得检测结果。
14、根据本发明实施例的第三方面,提供了一种计算设备,包括:存储器和处理器;
15、存储器用于存储计算机可执行指令,处理器用于执行计算机可执行指令,计算机可执行指令被处理器执行时实现本发明实施例第一方面提供的方法。
16、根据本发明实施例的第四方面,提供了一种计算机可读存储介质,其存储有计算机指令,该计算机指令被处理器执行时实现本发明实施例第一方面提供的方法。
17、本发明提供的目标检测方法,应用于机器人,机器人包括视觉传感器和测距传感器,获取视觉传感器采集的视觉数据以及测距传感器采集的测距数据;基于视觉数据提取视觉特征,并基于测距数据提取测距特征;将测距特征投影至目标视角空间,得到第一目标特征,并基于视觉特征进行深度估计得到目标深度特征,将目标深度特征投影至目标视角空间,得到第二目标特征;采用自注意力融合机制,对第一目标特征和第二目标特征进行融合,得到融合特征;基于融合特征,执行目标检测任务,获得检测结果。
18、如此,通过视觉传感器和测距传感器分别采集视觉数据和测距数据,并分别基于视觉数据和测距数据提取视觉特征和测距特征,可以得到不同类型的传感器分别采集并提取得到的不同类型的特征数据,提高特征信息的全面性和丰富性,使得后续应用于任务检测的特征信息尽可能完整,通过将测距特征投影至目标视角空间,能够在目标视角空间中得到相应的位置信息,对真实场景中的物体进行模拟和呈现,由于视觉特征中不包括深度特征,无法直接将视觉特征投影至目标视角空间,因此先基于视觉特征进行深度估计得到目标深度特征,再将目标深度特征投影至目标视角空间,并在目标视角空间中采用自注意力融合机制对第一目标特征和第二目标特征进行融合。通过自注意力融合机制,可以注意到视觉特征的像素点投影至目标视角空间后,像素点周围的一些位置信息,从而能够根据周围的位置信息找到像素点准确的深度位置,提高位置信息准确性,并且提高特征信息的完整性、全面性和精确性,从而提高目标检测任务的任务执行效果,提高检测效率以及检测结果的准确性。
技术特征:
1.一种目标检测方法,其特征在于,应用于机器人,所述机器人包括视觉传感器和测距传感器,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,在所述基于所述视觉数据提取视觉特征,并基于所述测距数据提取测距特征之前,还包括:
3.根据权利要求1或2所述的方法,其特征在于,所述测距传感器包括深度传感器,和/或,雷达;
4.根据权利要求3所述的方法,其特征在于,在所述将所述测距特征投影至目标视角空间,得到第一目标特征之前,还包括:
5.根据权利要求1所述的方法,其特征在于,所述基于所述视觉特征进行深度估计得到目标深度特征,包括:
6.根据权利要求5所述的方法,其特征在于,所述针对所述视觉数据中的各像素点,基于所述各像素点的视觉特征,估计得到所述各像素点对应的估计深度特征,包括:
7.根据权利要求1所述的方法,其特征在于,所述将所述目标深度特征投影至所述目标视角空间,得到第二目标特征,包括:
8.根据权利要求1所述的方法,其特征在于,所述采用自注意力融合机制,对所述第一目标特征和所述第二目标特征进行融合,得到融合特征,包括:
9.一种目标检测装置,其特征在于,配置于机器人,所述机器人包括视觉传感器和测距传感器,所述装置包括:
10.一种计算设备,其特征在于,包括:存储器和处理器;
11.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令被处理器执行时实现如权利要求1-8中任一项所述的方法。
技术总结
本发明提供一种目标检测方法、装置、计算设备和存储介质,应用于机器人,机器人包括视觉传感器和测距传感器,该方法包括:获取视觉传感器采集的视觉数据以及测距传感器采集的测距数据;基于视觉数据提取视觉特征,并基于测距数据提取测距特征;将测距特征投影至目标视角空间,得到第一目标特征,并基于视觉特征进行深度估计得到目标深度特征,将目标深度特征投影至目标视角空间,得到第二目标特征;采用自注意力融合机制,对第一目标特征和第二目标特征进行融合,得到融合特征;基于融合特征,执行目标检测任务,获得检测结果。通过将测距特征和目标深度特征投影至目标视角空间并采用自注意力融合机制获得融合特征,能够提高特征信息精确性。
技术研发人员:孙志雄,陈超
受保护的技术使用者:北京极智嘉科技股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!