基于逻辑场景的自动驾驶汽车数字孪生场景生成及验证方法及系统
本发明涉及预期功能安全中预期功能安全性评估领域,特别是一种基于逻辑场景的自动驾驶汽车数字孪生场景生成及验证方法及系统。
背景技术:
1、人工智能(ai)的研究和应用加速了对高度自动驾驶汽车(hav)的认知和实现。人工智能算法的不确定性也带来了安全风险。目前仍然严重缺乏切实有效地解决这些挑战的具体方法。因此,预期功能安全(sotif)是为了补充功能安全(fusa)和信息安全所不能覆盖的风险,以解决车辆人工智能的不确定性带来的挑战。负责任的人工智能和合乎道德的人工智能有助于降低意外的风险性危险,是一种确保预期功能安全的有效方法。现实世界场景的不可复制特点是物理测试的众所周知的局限性之一,但如今汽车制造商可以基于实时数据使用数字孪生技术,让重现测试场景变得可能。在虚拟测试中,高度自动驾驶汽车与其他虚拟交通参与者之间的闭环交互作用使得实验结果与模拟产生的证据难以直接比较,因为高度自动驾驶汽车的突发行为可能会放大环境之间的微小差异。因此,基于场景的测试被认为是用于认知和验证高度自动驾驶汽车最先进的测试。
技术实现思路
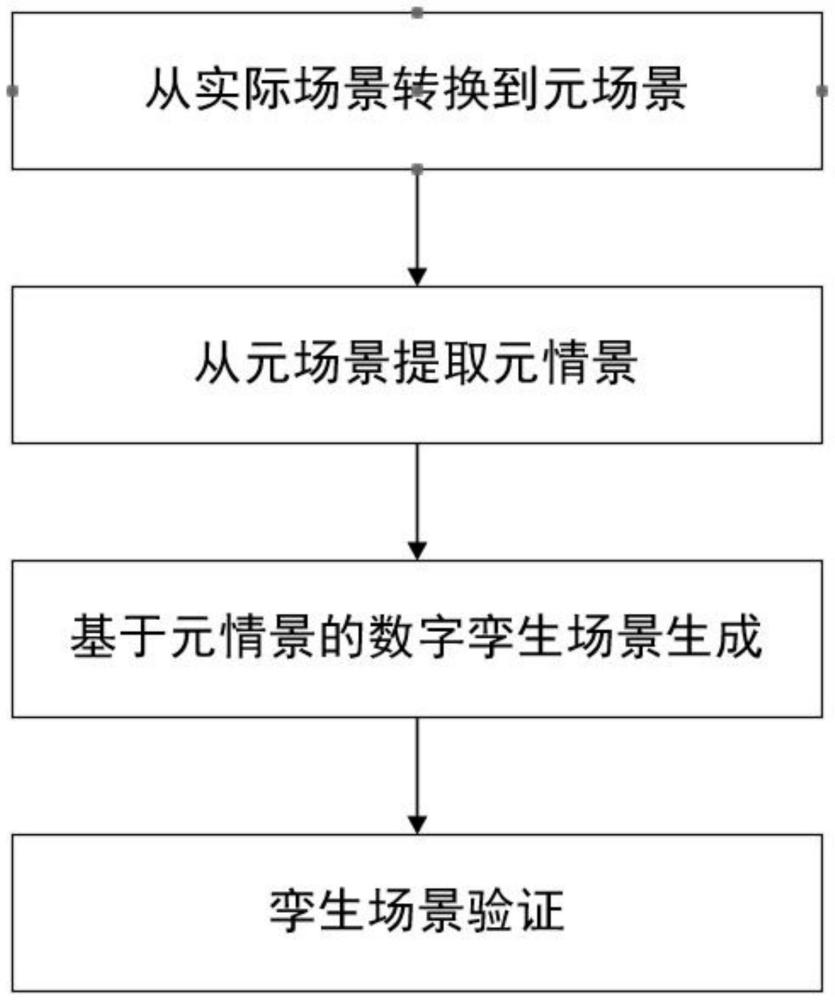
1、为了解决现有技术存在的不足,本发明的目的是提出了一种基于逻辑场景的自动驾驶汽车数字孪生场景生成及验证方法,具体包括以下四个步骤:
2、步骤一:从实际场景转换到元场景(msa),首先要使用基于opendrive和openscenario标准的xml语言将原始的真实场景转换为.xodr和.xosc文件,然后将基于.xodr和.xosc文件提取元场景中的属性和参数;
3、步骤二:从元场景提取一个或多个元情景(mse),元情景是一个元场景在特定时间点上的切片。所述特定时间点是指车辆在行驶过程中发生行驶状态改变的时间点,所述行驶状态包括并道、刹车、加减速等等。例如当发生预期外交通参与者的突然出现,行驶到了一小块湿滑的路面,车队头车行驶到了岔路口等等情况时,车辆的行驶状态相较于前一段时间会发生改变,出现上述行驶状态变化的时间点即为特定时间点。元情景包含一个固定时间点内的卡车队列信息、环境信息、道路信息和交通参与者信息,提取出元情景为下一步生成数字孪生场景做准备;
4、步骤三:基于元情景的数字孪生场景生成,以从元场景中提取出的元情景为基础,发生行驶状态改变的特定的元情景被转换和生成为孪生情景;孪生元情景和约束变量组合然后形成未经验证的孪生场景;
5、本发明中,所述约束变量是指在场景中对车辆进行限制的设定,包括场景中车辆需要遵守的交通规则等,具体包括限速、通行方向、道路标线等等;
6、步骤四:孪生场景(ts)验证,在基于元场景和元情景生成对自动卡车队列的虚拟测试孪生场景时,生成的孪生场景由孪生元情景组成。场景是研究对象在一段时间内的动态变化过程,情景是场景中特定时刻(发生行驶状态变化的时间)的片段,每个情景随着时间的变化形成一个新的情景。因为,在验证生成的孪生场景时,将孪生场景构造为一个考虑条件约束的时间自动机,并将孪生场景抽象为元情景,作为一个状态。通过判断所构造的时间自动机的时间约束和条件约束的可满足性,验证所生成的孪生场景是否有效。
7、步骤一中,元场景是被使用的真实场景,元情景是元场景在特定时间点上的切片;元场景通常是用于扩大的原始真实场景。元场景通常是一个持续一段时间的驱动过程,它是动态的和连续的。因此,可以通过创建几个关键的特定时间点的元情景来描述元场景的动态过程。元场景包含主要车辆信息、基本轨迹的起始和结束坐标,以及由n个元情景片段组成的矩阵信息。元情景片段由元组组成,元场景(msa)可以表示为msa={platoons,truck,n,scoord,ecoord,[nmse]},其中platoons表示整个卡车队列的信息,卡车truck表示自动驾驶卡车信息,n表示元情景片段数量,scoord和ecoord表示元情景的起始和终止(scoord是第一个选择的元情景,ecoord是最后一个选择的元情景),[nmse]表示mse矩阵,mse矩阵属于一个形式化的方法,矩阵中包括每个mse的信息*n个mse。具体来说,汽车和其他交通参与者的交互模型,就像其他车辆一样,不在元场景中,而是在元情景中。
8、步骤一中,从实际场景转换到元场景是基于opendrive和openscenario的,asamopendrive提供了使用可扩展标记语言(xml)描述道路网络的基础,openscenario格式允许创建详细的场景,可用于测试和验证自动驾驶算法和系统。在元场景转换算法中,从原始真实场景到元场景的转换过程取决于opendrive和openscenario标准。
9、步骤一中提到的元场景中的属性和参数包括车辆信息、基本轨迹的起始和结束坐标,以及由n个元情景片段组成的矩阵信息以及上述属性对应的具体参数。
10、步骤二中,元情景是元场景在关键的特定时间点的状态。每个元情景都是一个静态场景描述。因此,元情景包括静态时刻的道路信息、环境信息、卡车队列信息和第三方交通参与者信息。元情景中的卡车队列信息主要包括队列的状态、自助卡车状态(设定的速度和/或油门状态、车辆驾驶员和/或乘客的状态)等,所述队列状态包括队列领队、队列长度、队列空间等。道路信息包括车道信息和道路基础设施信息。其中,车道信息包括有关道路的基本信息,如曲率、坡度、海拔高度、道路摩擦力、车道数等信息。道路基础设施信息包括交通灯、道路绿化带、交通标志、路灯等信息。环境信息包括两个因素:天气和光照。天气用风、云、雨、雾、温度等表示,光照用光强、角度和光源等表示。第三方交通参与者的信息包括预期的交通参与者,如道路上的行人、机动车辆和非机动车辆。此外,本发明还提出了一个预期外的交通参与者。预期外的交通参与者包括突然进入主题车辆的角度或突然出现某些因素影响正常驾驶的主要车辆,如一块石头,突然从天上坠落,击中前挡风玻璃或动物突然冲向主要车辆的前面。根据对元情景的描述,通过形式化建模来定义元情景。
11、形式化建模具体如下:
12、在步骤二中,定义是一个n元谓词,(t1,t2,t3,t4)是一个项,本发明使用原子公式(t1,t2,t3,t4)代表元情景。在这个原子公式中,项表示构成元情景的元素,其中t1表示队列信息,t2表示道路信息,t3表示环境信息,t4表示交通参与者的信息,对应于图2中的四个分支。
13、步骤二中,根据元情景的定义,每个元情景都可以表示为一个原子公式。因此,从元场景提取元情景中等价于从构建好的公式中提取原子公式。在形式化模型中,元场景被分为i个时间点,这意味着元场景的公式包含i个原子公式:不存在某动作。a∧a:如一个超车的场景,有加速和转向,那么就有两个mse,一个是加速一个是转向。a∨a:一个场景下,可能存在二选一,a→a:有这个导致另外一个。在这个公式中,是一个约束变量,其中j的值范围为[0,m],m为约束变量中的设定上限值,而是一个自由变量,其中j的值范围为(a,b],b>a,a、b数值根据变量实际表示的含义及对应的要求确定相应的大小。此处以一个例子对约束变量和自由变量的取值进行说明,比如高速上限速60到120千米/小时,那么如果第二个j是速度的话,a、b就是60、120;同样的,如果第一个j代表加速度,那么就是从0开始到一个限定值的数字(高速上不能倒车所以加速度肯定是大于等于0的)。这两个变量的意思是元场景中所有的可变数值(如速度、加速度、车距、路面摩擦系数等等)都能用这两个变量完全进行表示,没有哪个可变数值是不能被表示的。
14、步骤三中,基于项替换定理构造了孪生场景,所述项替换定理是指在代数表达式中将相同的项用其和、差、积的代数和式子来代替的性质,一般用于简化和优化复杂的代数表达式;元情景l是一种一阶语言,i是l的实现,a(xi)∈f(l)是一个公式,xi是a(xi)的一个自由变量。设项t为xi的一个自由变量,v是i中l的任务,v'是v的等价的任务,且v'(xi)=v(t)。
15、步骤三中,项替换定理的特点是它的内在特点是不变的,无论是简单变量还是复杂变量所代表的场景。也就是说,无论确切场景的自由变量如何变化,场景的完整性都不会受到影响。基于项替换定理改变自由变量所产生的孪生场景在理论上是完整的。
16、步骤四中,设k为在定时自动机ta中的迁移。如果k的时间约束永远不能有效,则说k的时间约束是不满足的。否则,k的时间约束可以满足。只有当满足k的时间约束时,生成的孪生场景才有效。将该孪生场景构造为一个时间自动机的迁移序列,即假设该路径从起始时间k0开始通过ki,…,kj迁移到k,<k0,kt,…,kj,k>是一个迁移序列,所以<k0,kt,…,kj,k>可以表示孪生场景。假设ki和kj是过渡序列<k0,k1,…,kn>中的两个过渡,如果ki和kj是相邻的或者过渡ki或kj是在迁移序列的结束时,时间约束中的时钟值被设置为0的迁移,那么k0到k被称为时间关系迁移,否则k0到k被称为非时间关系迁移。
17、步骤四中,一个完整的场景是由定时自动机组成的,在一个共同的时钟和动作集合上的定时自动机网络,完整的场景由n个定时自动机组成。
18、步骤四中,状态之间的转换关系构成了场景中交通变化的过程,包括交通参与者位置的变化、天气的变化、交通规则的变化等。
19、本发明还提供了一种实现上述方法的系统,所述系统包括元场景转换模块、元情景提取模块、孪生场景生成模块、孪生场景验证模块。
20、本发明有益效果是:本发明基于自动驾驶汽车数字孪生场景的构建设计了一种预期功能安全性评估方法。本发明的主要设计特性是,可以通过真实场景的转换和基于元场景提取关键参数簇(参数簇中包含了一些元情景提取时需要的参数)来形成元情景。元情景被重新定义末端评估以生成许多用于自动驾驶汽车数字孪生虚拟测试的孪生场景。它解决了自动驾驶汽车虚拟测试中大量场景的要求,并保证了自动驾驶汽车中的人工智能负责任且合乎道德,从而提高了效率和预期功能安全评估的危害检测。
- 还没有人留言评论。精彩留言会获得点赞!