一种激光点云驱动的道路中线精准确定方法、系统
本发明属于车载激光点云数据处理领域,特别涉及一种激光点云驱动的道路中线精准确定方法、系统。
背景技术:
1、道路中线一般指道路路幅的中心线,但对于单向行驶和存在加宽渐变的道路,其中线未必是道路的中心线,可能是同向车道的车道中线。以道路加宽段为例,当平曲线半径等于或小于250m时,应在平曲线内侧加宽,此时的道路中心线与实际的道路中线(车道中线)存在偏差。
2、现有技术一般是通过车载激光系统的行车轨迹来确定道路中线,在此情况下,当车辆因路况复杂发生轨迹偏移,提取的道路中线产生误差,且这种方式无法应用于轨迹数据缺失(静站式激光扫描)的情况。为了提高算法的通用性,一些研究者采用车道标线来获取道路中线,当激光的远距离采集或标线存在磨损时,提取的道路标线精度受到干扰。另一些研究者通过道路轮廓来提取道路中心线,以开展后续进行信息提取,但道路中心线无法准确描述道路在特殊路段(加宽渐变段)的变化。
技术实现思路
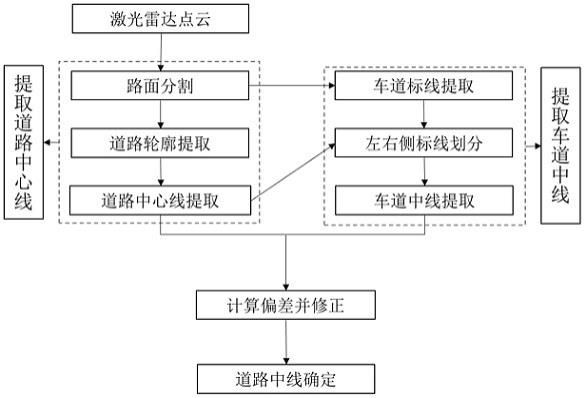
1、本发明所要解决的技术问题是:提出一种激光点云驱动的道路中线精准确定方法、系统,使用滚圆法提取道路轮廓,利用维诺图提取道路中心线,提取车道标线划分为内外侧车道标线,计算内外侧车道标线的平均值,获取车道中线,计算提取的车道中线与道路中心线的偏差并进行修正,确定道路中线,减少了因行车轨迹波动和激光的远距离采集造成的影响。
2、本发明为解决上述技术问题采用以下技术方案:
3、一种激光点云驱动的道路中线精准确定方法,包括以下步骤:
4、s1、利用ransac算法从激光点云中提取路面点云。
5、s2、利用滚圆法从路面点云中提取道路轮廓。
6、s3、利用维诺图从道路轮廓中提取道路中心线。
7、s4、对路面点云的反射强度进行阈值判断,提取车道标线点。
8、s5、根据获取的道路中心线,建立车道标线数据索引,将提取的车道标线划分为内外侧车道标线点云集。
9、s6、对内外侧车道标线点云集,以相同道路中心点进行索引,计算内外侧车道标线的三维坐标平均值,获取车道中线。
10、s7、计算车道中线与道路中心线的偏差并进行修正,确定道路中线。
11、进一步的,步骤s1中,提取路面点云的具体内容为:当di<dt,则表示该点位于平面上,其中di为激光点云中任一点i到平面的距离,dt为距离阈值;统计位于平面上的点数,设定平面点数rn,当平面点数≥rn的点云平面即为路面点云。
12、进一步的,步骤s4中,提取车道标线点的具体内容为:当ij≥ih,该点则为车道标线点;其中ij为路面点云中第j个点的反射强度,ih为标线反射强度阈值。
13、进一步的,步骤s5中,内外侧车道标线划分的具体内容为:
14、对于车道标线中的任一点p,使用kd-tree数据结构从道路中心线中搜索距离其最近的道路中心点ci及对应的最短距离dmin,记为(ci,dmin);
15、若p点的横坐标大于道路中心点横坐标,则dmin取正号,表示标线点在道路中心线外侧;反之,则dmin取负号,表示标线点在道路中心点内侧。
16、进一步的,步骤s6中,获取车道中线的具体内容为:
17、以任一道路中心点进行索引ci,分别从内外侧车道标线点云集中,提取对应的内外侧车道标线点(xli,yli,zli)和(xri,yri,zri),计算内外侧车道标线的三维坐标平均值,作为车道中线的坐标,具体公式如下:
18、
19、
20、
21、重复遍历,直至完成车道标线中所有点的坐标计算,获取车道中线。
22、进一步的,步骤s7中,确定道路中线的具体步骤如下:
23、s701、根据任一道路中心点ci的坐标(xci,yci,zci)和对应的车道中线ti的坐标(xmi,ymi,zmi),将两点投影至xy平面,计算偏差dli和ti处的切线角θi,具体公式为:
24、
25、θi=arctan(ki)
26、式中,ki为车道中线在xy平面形成的曲线在ti处的斜率。
27、s702、根据偏差dli和ti处的切线角θi,对道路中心线的xci、yci坐标进行修正,得到道路中线的xi’、yi’坐标,具体公式为:
28、x′i=xci-dli×cos(θi)
29、y′i=yci+dli×sin(θi)。
30、s703、根据道路中线的xi’、yi’坐标,在路面点云中搜索得到该位置对应的zi’坐标,即道路中线的坐标为(xi’,yi’,zi’)。
31、进一步的,本发明还提出了一种激光点云驱动的道路中线精准确定系统,包括
32、路面点云提取模块,用于利用ransac算法从激光点云中提取路面点云。
33、道路轮廓提取模块,用于利用滚圆法从路面点云中提取道路轮廓。
34、道路中心线提取模块,用于利用维诺图从道路轮廓中提取道路中心线。
35、车道标线点提取模块,用于对路面点云的反射强度进行阈值判断,提取车道标线点。
36、内外侧车道标线点云集划分模块,用于根据获取的道路中心线,建立车道标线数据索引,将提取的车道标线划分为内外侧车道标线点云集。
37、车道中线获取模块,用于对内外侧车道标线点云集,以相同道路中心点进行索引,计算内外侧车道标线的三维坐标平均值,获取车道中线。
38、道路中线确定模块,用于计算车道中线模块中的车道中线与道路中心线的偏差并进行修正,确定道路中线。
39、进一步的,本发明还提出了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现激光点云驱动的道路中线精准确定方法的步骤。
40、进一步的,本发明还提出了一种计算机可读的存储介质,所述计算机可读的存储介质存储有计算机程序,所述计算机程序被处理器运行时执行所述激光点云驱动的道路中线精准确定方法。
41、本发明采用以上技术方案,与现有技术相比,其显著技术效果如下:
42、(1)本发明基于激光点云,实现对道路中线的精准提取,有利于开展几何线形计算和实现道路数字化。
43、(2)本发明基于提取的道路中心线和对应中心点的距离对车道标线构建数据索引,可以根据车道标线的三维坐标确定其在道路的相对位置,以便区分内侧和外侧车道标线。
44、(3)本发明将车道中线与道路中心线融合并进行修正来确定道路中线,避免了常规方法中使用单一车道标线或者道路中心线带来的点云噪声数据以及加宽路段存在偏差的问题。
45、(4)本发明避免了在y-z或x-z平面对z坐标的修正,减少了计算复杂度。同时,根据x、y坐标从已有点云中搜索得到z坐标,保证了数据的合理性和准确性。
46、(5)本发明只用到了激光点云的基本数据,具有较高的适用性。
- 还没有人留言评论。精彩留言会获得点赞!