一种单目相机的地表物体空间分析方法、设备及介质与流程
本说明书涉及空间定位,尤其涉及一种单目相机的地表物体空间分析方法、设备及介质。
背景技术:
1、在水利领域中,水利安全监测尤其重要,水利安全监测适用于水利管理部门远程监测水库实时数据,同时支持远程图像监控,为保障水库提供了准确、及时的现场信息。在进行水利安全监测时,需要对地表物体的空间活动进行分析。在隐患预警的场景下,当在监测区域内出现人员或异常物体时,其所处的实际位置、移动轨迹都是需要监测的内容。另外,在日常监测的场景下,对地表物体进行空间分析可以及时发现异常情况,起到安全防护的作用。
2、在对地表物体进行空间分析时,需要对地表物体进行定位,视觉定位测量技术目前主要分为单目视觉测量、多目(包括双目)视觉测量等。其中多目视觉测量是利用多相机同时采集图像,并根据各相机间的相对位置关系确定空间坐标。单目相机相对于多目相机存在结构简单、测量视场范围大等优势,并且在实时测量中避免了特征点匹配等问题。
3、在水利领域,单目相机的安装通常会安装在距离地面一定高度的位置处,不同的安装参数下采集到的图像不同,现有的通过单目相机进行空间定位的方法未考虑相机的安装误差,导致定位结果不准确,也就无法对地表物体进行准确的空间分析,此外,在采集到图像后需要进行数据处理的过程,导致空间分析的实时性较差。因此,目前的单目相机定位方法由于无法实时、准确的得到物体实际位置,导致无法满足水利领域空间分析的准确性和实时性的分析需求。
技术实现思路
1、本说明书一个或多个实施例提供了一种单目相机的地表物体空间分析方法、设备及介质,用于解决如下技术问题:目前的单目相机定位方法由于无法实时、准确的得到物体实际位置,导致无法满足水利领域空间分析的准确性和实时性的分析需求。
2、本说明书一个或多个实施例采用下述技术方案:
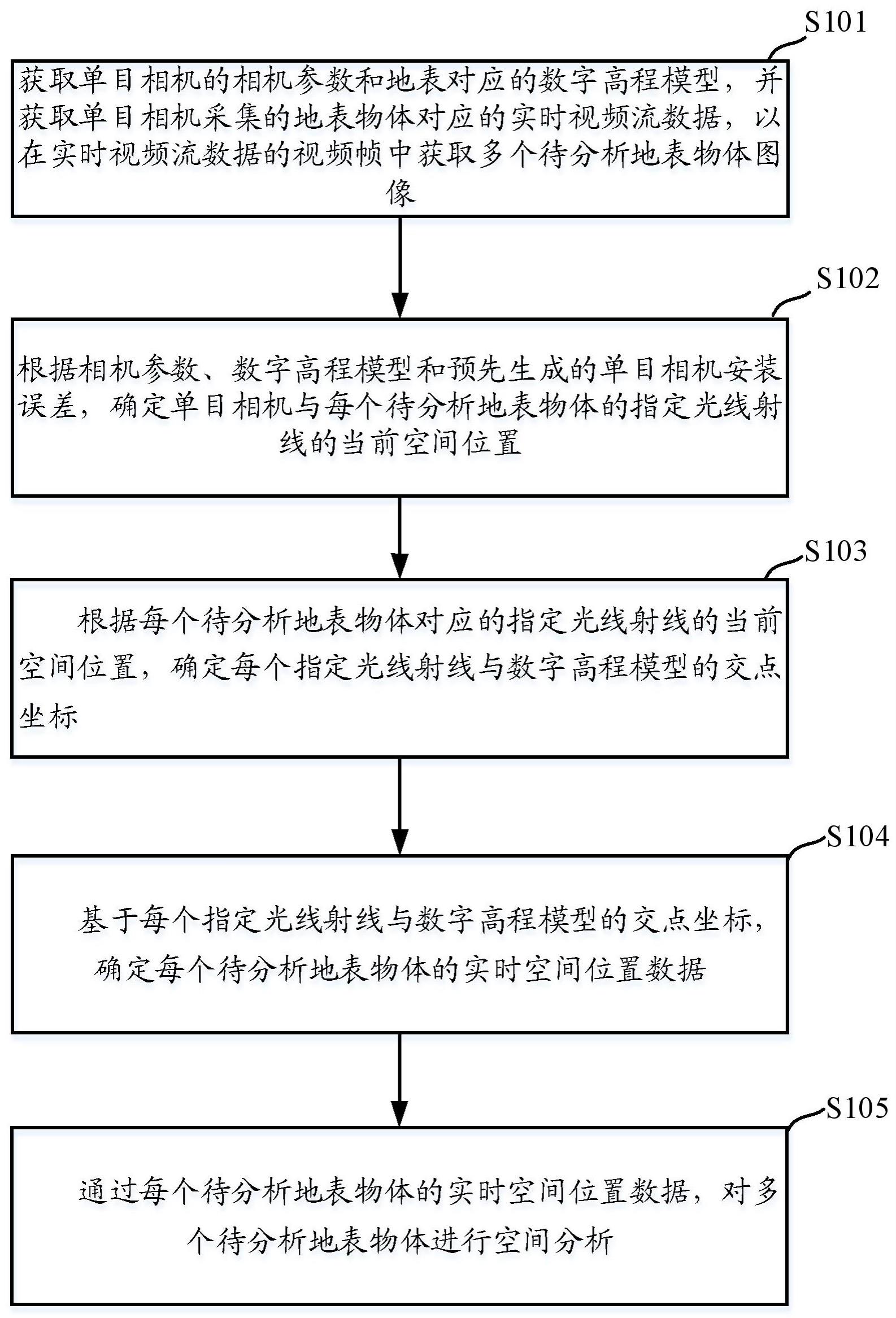
3、本说明书一个或多个实施例提供一种单目相机的地表物体空间分析方法,所述方法包括:获取单目相机的相机参数和地表对应的数字高程模型,并获取所述单目相机采集的地表物体对应的实时视频流数据,以在所述实时视频流数据的视频帧中获取多个待分析地表物体图像;根据所述相机参数、所述数字高程模型和预先生成的单目相机安装误差,确定所述单目相机与每个待分析地表物体的指定光线射线的当前空间位置,其中,所述指定光线射线为所述单目相机的当前安装位置与每个所述地表物体与地面接触点的光线射线;根据每个所述待分析地表物体对应的指定光线射线的当前空间位置,确定每个指定光线射线与所述数字高程模型的交点坐标;基于每个指定光线射线与所述数字高程模型的交点坐标,确定每个所述待分析地表物体的实时空间位置数据;通过每个所述待分析地表物体的实时空间位置数据,对所述多个待分析地表物体进行空间分析。
4、进一步地,根据所述相机参数、所述数字高程模型和预先生成的单目相机安装误差,确定所述单目相机与每个待分析地表物体的指定光线射线的当前空间位置之前,所述方法还包括:确定所述相机参数中的内方位元素数据和预先通过所述单目相机采集的校正图像数据,所述校正图像数据包括参考地表物体、所述参考地表物体的实际位置坐标;根据所述相机参数中的内方位元素数据、所述校正图像数据和预先设置的初始单目相机安装误差,生成所述参考地表物体的计算位置坐标;基于所述参考地表物体的计算位置坐标和所述参考地表物体的实际位置坐标,对所述初始单目相机安装误差进行校正,生成符合要求的单目相机安装误差。
5、进一步地,根据所述相机参数中的内方位元素数据、所述校正图像数据和预先设置的初始单目相机安装误差,生成所述参考地表物体的计算位置坐标,具体包括:根据所述相机参数中的内方位元素数据和所述校正图像数据,生成所述单目相机与所述参考地表物体与地面接触点的第一光线射线的初始空间位置;根据所述初始空间位置和预先设置的初始单目相机安装误差,确定所述第一光线射线与所述数字高程模型的计算交点坐标,将所述计算交点坐标作为所述参考地表物体的计算位置坐标。
6、进一步地,根据所述相机参数、所述数字高程模型和预先生成的单目相机安装误差,确定所述单目相机与每个待分析地表物体的指定光线射线的当前空间位置,具体包括:确定所述相机参数,其中,所述相机参数包括内方位元素数据和相机安装位置点的相机安装位置坐标;根据所述单目相机安装误差和所述相机安装位置坐标,生成所述单目相机的云台水平夹角和云台垂直夹角;确定所述待分析地表物体图像中待分析地表物体与地面的接触点,并根据所述接触点,生成所述接触点与所述相机安装位置点的指定光线射线;根据所述相机参数中的内方位元素数据,生成所述指定光线射线与所述单目相机主光轴的光线水平夹角和光线垂直夹角;基于所述云台水平夹角和所述光线水平夹角,生成所述指定光线射线的方位角;基于所述云台垂直夹角和所述光线垂直夹角,生成所述指定光线射线的俯仰角;通过所述相机安装位置点、所述指定光线射线的方位角和所述指定光线射线的俯仰角,确定所述指定光线射线的当前空间位置。
7、进一步地,根据每个所述待分析地表物体对应的指定光线射线的当前空间位置,确定每个指定光线射线与所述数字高程模型的交点坐标,具体包括:确定所述数字高程模型中的多个栅格;在所述多个栅格中进行栅格筛选,得到符合要求的指定数量个栅格;根据每个所述待分析地表物体对应的指定光线射线的当前空间位置,确定所述指定光线射线与所述指定数量个栅格之间的多个待选交点;获取每个待选交点与所述单目相机的当前安装位置之间的距离;根据每个待选交点与所述单目相机的当前安装位置之间的距离,在所述多个待选交点中,将距离最近的第一交点作为所述指定光线射线与所述数字高程模型的交点,并生成所述交点坐标。
8、进一步地,生成所述交点坐标,具体包括:确定所述第一交点对应的栅格平面,以确定所述第一交点对应的栅格平面的第一平面法向量坐标;在所述栅格平面中,获取任意一点的点坐标;根据所述指定光线射线的当前空间位置,确定所述指定光线射线对应的向量坐标;根据所述当前安装位置坐标、所述第一平面法向量坐标、所述点坐标和所述指定光线射线对应的向量坐标,生成所述交点坐标。
9、进一步地,基于所述参考地表物体的计算位置坐标和所述参考地表物体的实际位置坐标,对所述初始单目相机安装误差进行校正,生成符合要求的单目相机安装误差,具体包括:根据所述参考地表物体的计算位置坐标和所述参考地表物体的实际位置坐标,计算所述计算位置坐标和所述实际位置坐标的差值;判断所述计算位置坐标和所述实际位置坐标的差值是否满足预设误差范围;若所述计算位置坐标和所述实际位置坐标的差值不满足所述预设误差范围,调整所述初始单目相机安装误差中的多个位置位移调整参数和偏转角参数,生成校正单目相机安装误差;根据所述相机参数中的内方位元素数据、所述校正图像数据和所述校正单目相机安装误差,生成所述参考地表物体的校正计算位置坐标;确定所述校正计算位置坐标和所述实际位置坐标之间的差值,当所述校正计算位置坐标和所述实际位置坐标之间的差值符合所述预设误差范围时,将所述校正计算位置坐标,作为符合要求的单目相机安装误差。
10、进一步地,通过每个所述待分析地表物体的实时空间位置数据,对所述多个待分析地表物体进行空间分析,具体包括:根据每个所述待分析地表物体的实时空间位置数据,生成多个待分析地表物体之间的相对空间位置关系;获取任意时间间隔内多个时刻下每个所述待分析地表物体的多个实时空间位置数据;根据每个所述待分析地表物体的多个实时空间位置数据,生成每个所述待分析地表物体在所述时间间隔内的空间变化轨迹;根据所述多个待分析物体之间的相对空间位置关系和所述空间变化轨迹,对所述多个待分析地表物体进行空间分析。
11、本说明书一个或多个实施例提供一种单目相机的地表物体空间分析设备,包括:
12、至少一个处理器;以及,
13、与所述至少一个处理器通信连接的存储器;其中,
14、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述方法。
15、本说明书一个或多个实施例提供的一种非易失性计算机存储介质,存储有计算机可执行指令,所述计算机可执行指令设置为:
16、获取单目相机的相机参数和地表对应的数字高程模型,并获取所述单目相机采集的地表物体对应的实时视频流数据,以在所述实时视频流数据的视频帧中获取多个待分析地表物体图像;根据所述相机参数、所述数字高程模型和预先生成的单目相机安装误差,确定所述单目相机与每个待分析地表物体的指定光线射线的当前空间位置,其中,所述指定光线射线为所述单目相机的当前安装位置与每个所述地表物体与地面接触点的光线射线;根据每个所述待分析地表物体对应的指定光线射线的当前空间位置,确定每个指定光线射线与所述数字高程模型的交点坐标;基于每个指定光线射线与所述数字高程模型的交点坐标,确定每个所述待分析地表物体的实时空间位置数据;通过每个所述待分析地表物体的实时空间位置数据,对所述多个待分析地表物体进行空间分析。
17、本说明书实施例采用的上述至少一个技术方案能够达到以下有益效果:通过上述技术方案,根据相机参数、数字高程模型和预先生成的单目相机安装误差,确定单目相机与每个待分析地表物体的指定光线射线的当前空间位置,考虑单目相机的安装误差,对光线射线进行校正,保证了定位的准确性;根据每个指定光线射线与数字高程模型的交点坐标,生成每个待分析地表物体的实时空间位置数据,对地表物体进行非接触定位,可以实时获得到多个物体真实空间坐标;将现实世界的地表物体实时投射到虚拟信息系统中,可以利用地理信息技术实时分析区域内,地表物体的轨迹运动及空间分布情况,还可利用结果中的高程信息得到闸站水位;此外,由于是用单目摄像头进行信息采集,可以充分利用存量摄像头硬件资源,没有硬件重复建设,硬件成本低,并且可以满足位置数据的实时性需求。
- 还没有人留言评论。精彩留言会获得点赞!