一种重型车辆荷载识别方法与流程
本申请涉及桥梁安全监测领域,具体涉及一种重型车辆荷载识别方法。
背景技术:
1、桥梁结构在运营服役期间,其受到最主要的荷载之一是移动车辆荷载,其中超重车辆是造成桥梁结构损伤的主要影响因素。因此,桥梁车辆荷载识别对结构的运维管理至关重要,尤其是数量较多、使用寿命较长的中小跨径桥梁。
2、目前,在车辆荷载识别方法的实际应用中,桥梁动态称重(bwim)系统已在全国多地得到推广普及,该系统利用图像识别技术与称重传感器对车辆的车型、车重与车速等进行识别与记录。
3、但是,现有的桥梁动态称重系统存在以下缺陷:当经过的车流较为密集时,系统对车辆荷载的识别精度会大大降低,例如前后两辆间隙较小且车速相近的二轴车被识别为四轴车,或者车辆未按正常车道行驶致使检测到的车重信息不准确等。
4、另一方面,在桥上设置高清摄像头,通过目标检测等算法对桥梁结构上的车辆荷载时空信息进行识别,该方法对货车车重的识别误差较大,如果重型货车存在超载的情况,仅通过计算机视觉无法准确判别超重车辆的车重信息。
技术实现思路
1、本申请的一个目的在于提供一种车辆荷载信息识别更为快速、实时和准确的重型车辆荷载识别方法。
2、为达到以上目的,本申请采用的技术方案为:一种重型车辆荷载识别方法,包括步骤:
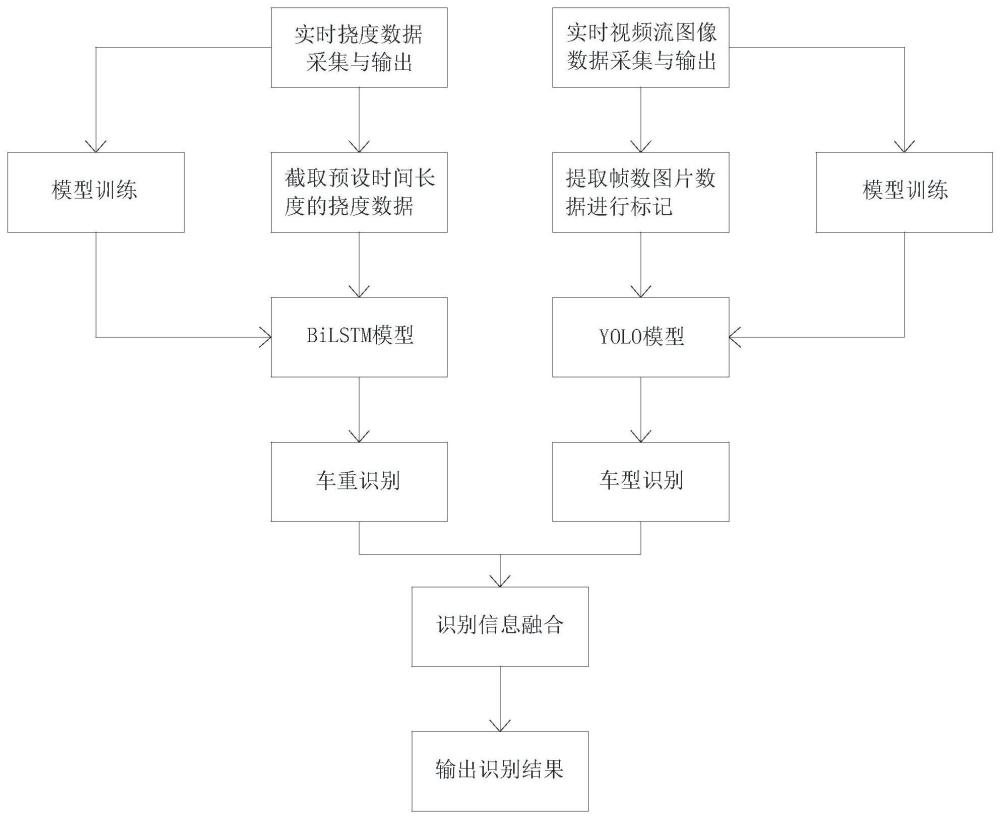
3、s100车重识别,采集待监测桥梁目标截面的车致动挠度数据,通过bilstm车重识别模型对车致动挠度数据进行处理,根据训练学习得到挠度与车重之间的映射关系,从而反演出待识别车辆的实际车重;
4、s200车型识别,采集经过待监测桥梁目标截面的待识别车辆的视频图像数据,通过yolo目标检测模型对视频图像数据进行处理,输出待识别车辆的车型;
5、s300信息融合输出,将bilstm车重识别模型和yolo目标检测模型输出的待识别车辆的实际车重和车型进行信息配对融合,将融合后的信息共同输出至视频监控画面进行识别结果呈现。
6、根据本申请的一实施例,所述步骤s100包括步骤:
7、s110,在待监测桥梁的目标截面位置安装挠度测量仪器,实时采集目标截面处的多个时间点的车致动挠度数据;
8、s120,找到多个时间点的车致动挠度数据中变化的峰值时间点,基于该峰值时间点截取合适时间长度上的车致动挠度数据样本;
9、s130,筛选bwim系统数据库中需要进行识别的车辆的车重数据,并通过待监测桥梁上的bwim系统与目标截面之间的距离差,计算待识别车辆经过bwim系统后到达目标截面的时间ti,然后根据时间ti将车致动挠度数据样本与车重数据相匹配,形成bilstm车重识别模型的训练数据集;
10、s140,构建bilstm车重识别模型,将训练数据集输入到bilstm车重识别模型中进行训练学习,直至bilstm车重识别模型的测试结果符合识别精度。
11、作为优选,所述步骤s110中,挠度测量仪器选用毫米波雷达,并安装至待监测桥梁的目标截面位置的桥面结构底部,对目标截面位置的车致动挠度数据进行测量采集。
12、作为优选,所述步骤s120中,通过寻峰算法在多个时间点的车致动挠度数据中找到合适挠度幅值范围内的峰值时间点。
13、作为优选,所述步骤s130中,车辆到达目标截面的时间ti的计算公式如下:
14、ti=ti±l/v
15、其中,ti为bwim系统识别出待识别车辆的时间,l为待监测桥梁上的bwim系统与目标截面之间的距离差,v为bwim系统识别出的待识别车辆经过时的速度,假设待识别车辆行驶到目标截面位置之前的速度视为恒定。
16、根据本申请的一实施例,所述步骤s200包括步骤:
17、s210,将监控仪器设置在待监测桥梁的目标截面附近,作为yolo目标检测模型用于识别目标截面处待识别车辆车型的视频图像数据的采集设备;
18、s220,构建yolo目标检测模型,针对采集到的不同车型的视频图像数据进行数据标记,形成yolo目标检测模型的训练数据集,将训练数据集输入到yolo目标检测模型中进行训练,直至yolo目标检测模型的测试结果满足识别精度。
19、作为优选,所述步骤s210中,监控仪器选用高清摄像头,并以合适高度和角度安装在待监测桥梁的目标截面附近的桥梁附属结构上。
20、根据本申请的一实施例,所述步骤s300包括步骤:
21、s310,将封装好的bilstm车重识别模型和yolo目标检测模型的模型程序以及模型训练参数上传至服务器;
22、s320,当待识别车辆行驶经过目标截面,挠度测量仪器将采集到的实时车致动挠度数据传输到服务器的数据库中,服务器将实时接收到的车致动挠度数据输入到bilstm车重识别模型程序中进行计算得到待识别车辆的车重结果;
23、s330,待识别车辆行驶到监控仪器识别范围内时,采集视频图像数据,输入到yolo目标检测模型进行待识别车辆的车型识别;
24、s340,将bilstm车重识别模型和yolo目标检测模型的输出结果进行融合并同时反馈到视频监控画面。
25、作为优选,所述步骤s320中,服务器对实时接收到的车致动挠度数据按照预设时间长度进行提取后再输入到bilstm车重识别模型程序中。
26、作为优选,车致动挠度数据至少包括挠度时程和与其相对应的时间。
27、与现有技术相比,本申请的有益效果在于:
28、1、本申请的重型车辆荷载识别方法采用轻量化数据采集手段与技术,利用bilstm与yolo模型能够快速的对采集到的数据进行处理,可以实时的检测出重型车辆并识别其对应的车重,从而实现每辆重型车辆的追踪与记录,上述手段对目标车辆荷载的识别及反应速度相较于传统bwim系统更快且实时。
29、2、本申请的重型车辆荷载识别方法通过从不同角度感知和获取与车辆荷载相关联的信息,利用深度学习模型对这些信息进行处理学习并得到信息之间的映射特征,从而实现对车辆载荷信息的推导和判断,其基本原理在于通过处理多源异构数据,融合多元信息进行决策,从而更加准确地识别目标车辆荷载。
30、3、本申请的重型车辆荷载识别方法具有较强的抗干扰性,其一体现在挠度测量方面,基于毫米波雷达对桥梁结构进行挠度测量,精度更高,受到的外界干扰因素更少;其二在于深度学习模型的训练数据样本充足时,可以学习到输入数据信息与输出数据信息之间更深层的高维特征,大幅度降低噪声影响;而上述两者结合后能够更进一步的降低噪声影响。
技术特征:
1.一种重型车辆荷载识别方法,其特征在于,包括步骤:
2.如权利要求1所述的一种重型车辆荷载识别方法,其特征在于,所述步骤s100包括步骤:
3.如权利要求2所述的一种重型车辆荷载识别方法,其特征在于:所述步骤s110中,挠度测量仪器选用毫米波雷达,并安装至待监测桥梁的目标截面位置的桥面结构底部,对目标截面位置的车致动挠度数据进行测量采集。
4.如权利要求2所述的一种重型车辆荷载识别方法,其特征在于:所述步骤s120中,通过寻峰算法在多个时间点的车致动挠度数据中找到合适挠度幅值范围内的峰值时间点。
5.如权利要求2所述的一种重型车辆荷载识别方法,其特征在于:所述步骤s130中,车辆到达目标截面的时间ti的计算公式如下:
6.如权利要求1所述的一种重型车辆荷载识别方法,其特征在于,所述步骤s200包括步骤:
7.如权利要求6所述的一种重型车辆荷载识别方法,其特征在于:所述步骤s210中,监控仪器选用高清摄像头,并以合适高度和角度安装在待监测桥梁的目标截面附近的桥梁附属结构上。
8.如权利要求1所述的一种重型车辆荷载识别方法,其特征在于,所述步骤s300包括步骤:
9.如权利要求8所述的一种重型车辆荷载识别方法,其特征在于:所述步骤s320中,服务器对实时接收到的车致动挠度数据按照预设时间长度进行提取后再输入到bilstm车重识别模型程序中。
10.如权利要求1至9任一权利要求所述的一种重型车辆荷载识别方法,其特征在于:车致动挠度数据至少包括挠度时程和与其相对应的时间。
技术总结
本申请公开了一种重型车辆荷载识别方法,先采集待监测桥梁目标截面的车致动挠度数据,通过BiLSTM车重识别模型对车致动挠度数据进行处理,根据训练学习得到挠度与车重之间的映射关系,从而反演出待识别车辆的实际车重;同时采集经过待监测桥梁目标截面的待识别车辆的视频图像数据,通过YOLO目标检测模型对视频图像数据进行处理,输出待识别车辆的车型;最后将BiLSTM车重识别模型和YOLO目标检测模型输出的待识别车辆的实际车重和车型进行信息配对融合,将融合后的信息共同输出至视频监控画面进行识别结果呈现,本申请的重型车辆荷载识别方法能够对多源异构数据进行快速、实时和精准的处理融合,具有更高的车辆荷载信息识别准确性。
技术研发人员:应国刚,胡洁亮,张文达,陈维敏,任浩东,姚源彬,罗方
受保护的技术使用者:宁波朗达工程科技有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!