一种木结构历史建筑结构构件表征损伤的鉴定方法及系统与流程
本发明涉及损伤鉴定,更具体的说是涉及一种木结构历史建筑结构构件表征损伤的鉴定方法及系统。
背景技术:
1、历史城镇保护更新修复类的建设工程中,有大量木结构的老旧建筑物,木结构容易产生开裂、脱隼、糟朽等质量问题,需要及时进行修复或者替换,避免重要历史建筑的损坏及内外部人员的安全。
2、四足机器人能够远程无人操控,在历史城镇的老旧建筑中代替人员进行安全的巡检工作,有着灵活性高、续航能力强、覆盖面广的优点,完全规避了人员在危险老旧建筑物中的安全风险;基于ai的视觉深度学习技术在基于大量的木结构表征质量缺陷的图像训练后,能够部署在四足机器人的影像采集装置上,快速精确地判定木结构表征的质量问题。
3、因此,如何采用四足机器人及图像识别算法技术进行木结构的损伤鉴定是本领域技术人员亟需解决的技术问题。
技术实现思路
1、有鉴于此,本发明提供了一种木结构历史建筑结构构件表征损伤的鉴定方法及系统,利用四足机器人及图像识别算法对木结构历史建筑结构构件的损伤进行表征和鉴定,计算修复完成度,为保护和修复历史建筑提供有效的技术支持。
2、为了实现上述目的,本发明提供如下技术方案:
3、一种木结构历史建筑结构构件表征损伤的鉴定方法,主要分为首次巡检流程和日常巡检流程;
4、首次巡检流程具体包括以下步骤:
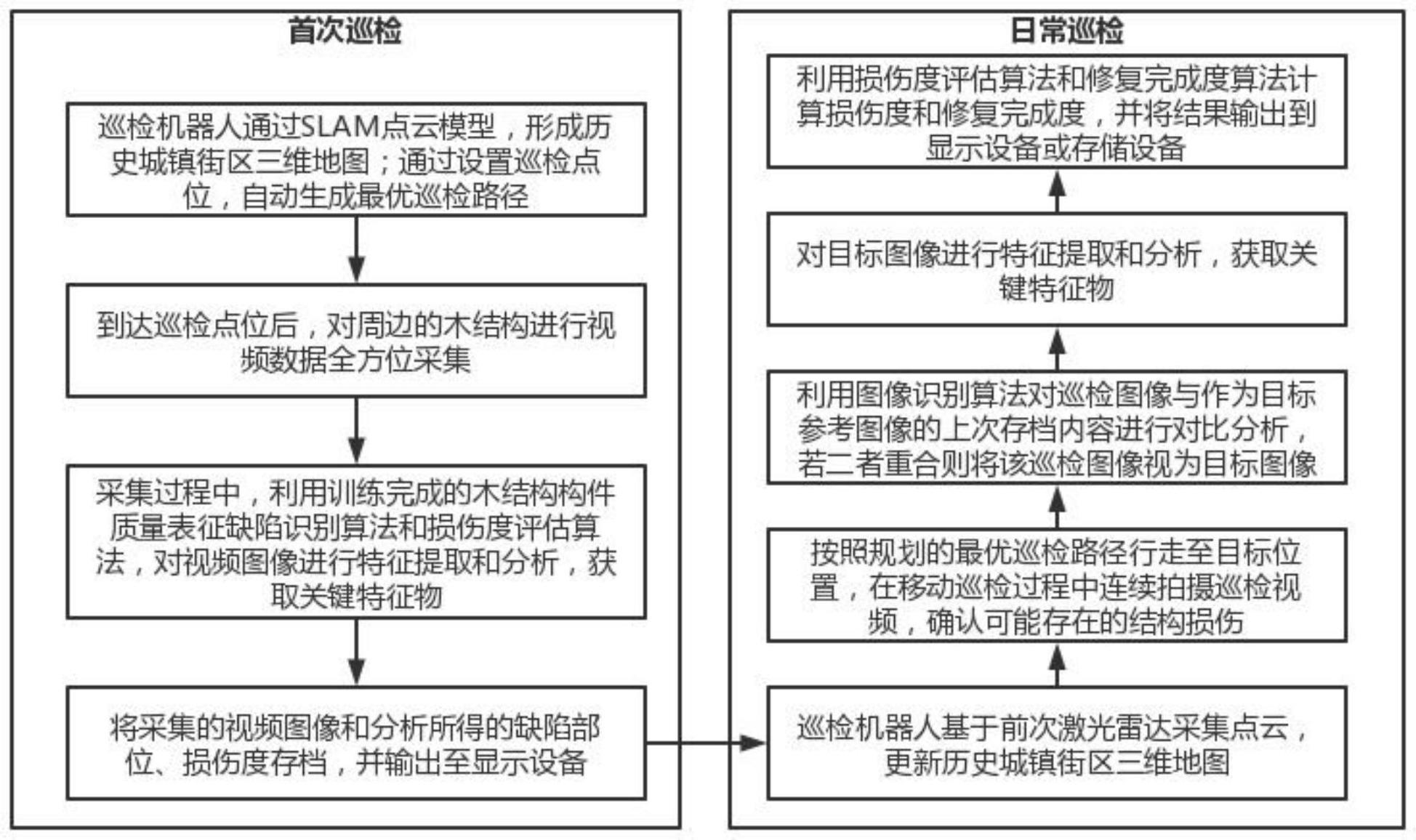
5、巡检机器人通过slam点云模型,形成历史城镇街区三维地图;通过设置巡检点位,自动生成最优巡检路径;
6、到达巡检点位后,对周边的木结构进行视频数据全方位采集;
7、采集过程中,利用训练完成的木结构构件质量表征缺陷识别算法和损伤度评估算法,对视频图像进行特征提取和分析,获取关键特征物;
8、将采集的视频图像和分析所得的缺陷部位、损伤度存档,并输出至显示设备;
9、日常巡检流程具体包括以下步骤:
10、巡检机器人基于前次激光雷达采集点云,更新历史城镇街区三维地图;
11、按照规划的最优巡检路径行走至目标位置,在移动巡检过程中连续拍摄巡检视频,确认可能存在的结构损伤;
12、利用图像识别算法对巡检图像与作为目标参考图像的上次存档内容进行对比分析,若二者重合则将该巡检图像视为目标图像;
13、对目标图像进行特征提取和分析,获取关键特征物;
14、利用损伤度评估算法和修复完成度算法计算损伤度和修复完成度,并将结果输出到显示设备或存储设备。
15、可选的,自动生成最优巡检路径采用的是路径规划算法,路径规划算法的考虑因素包括:历史建筑的结构特点、损伤区域的位置及巡检机器人的移动能力。
16、可选的,按照规划的最优巡检路径行走至目标位置之后,所述方法还包括:
17、通过图像识别算法,对目标历史建筑进行检测和定位,确认目标历史建筑的准确位置;
18、其中,图像识别算法包括:基于深度学习的卷积神经网络、基于迁移学习的预训练模型。
19、可选的,确认可能存在的结构损伤,具体包括以下步骤:
20、通过巡检机器人内置的循环神经网络对连续拍摄的巡检视频所构成的图像序列进行分析,获取图像序列中的时序信息;
21、结合支持向量机算法,对图像序列进行分类,检测可能存在的结构损伤。
22、可选的,目标图像的确定过程包括:
23、利用目标检测算法,对巡检图像进行目标检测和定位;
24、通过对比巡检图像和目标参考图像,识别与目标参考图像相符的损伤区域,并将该巡检图像作为目标图像。
25、可选的,获取关键特征物,具体包括以下步骤:
26、通过图像处理技术对目标图像进行通道分离,得到对应的红通道图像、绿通道图像、蓝通道图像;
27、根据目标历史建筑的类型,从红通道图像、绿通道图像、蓝通道图像中选择清晰度和对比度最高的通道图像作为处理对象;
28、根据目标历史建筑的类型,设定适当的阈值,对选择的单通道图像进行阈值处理,得到二值化图像;
29、基于形态学操作和连通域分析技术,从二值化图像中提取最大的连通域,获得准确的连通域;
30、对连通域进行填充操作,获取填充的连通域轮廓,并提取连通域轮廓的关键特征物。
31、可选的,损伤度评估算法的考虑因素包括:损伤面积、损伤类型权重和置信度;损伤度的计算公式为:
32、损伤度=(面积系数×损伤面积)+(类型系数×损伤类型权重)+(置信度系数×置信度);
33、其中,面积系数为基于损伤面积进行调整的权重系数,用于反映损伤的严重程度;损伤面积为损伤区域的实际面积,用于反映损伤的范围和扩展程度;
34、类型系数为调整不同损伤类型权重的权重系数,用于对不同类型的损伤进行加权;损伤类型权重为对不同损伤类型进行评估和赋值的权重参数;
35、置信度系数为考虑图像识别算法的准确性、可靠性及损伤识别的置信程度的权重系数,用于对损伤的识别可靠性进行调整;置信度为损伤识别的置信程度,用于反映损伤识别的可信程度和准确度。
36、可选的,修复完成度算法的考虑因素包括:损伤度、修复区域的面积、形状和质量;修复完成度=(修复区域面积/总损伤区域面积)×(修复质量/损伤质量)×(修复形状匹配度/损伤形状匹配度)×100%。
37、一种木结构历史建筑结构构件表征损伤的鉴定系统,包括:首次巡检单元和日常巡检单元;
38、首次巡检单元包括:
39、路径规划模块,用于通过slam点云模型,形成历史城镇街区三维地图;通过设置巡检点位,自动生成最优巡检路径;
40、采集模块,用于对巡检点位周边的木结构进行视频数据全方位采集;
41、第一特征提取模块,用于利用训练完成的木结构构件质量表征缺陷识别算法和损伤度评估算法对视频图像进行特征提取和分析,获取关键特征物;
42、存档及输出模块,用于将采集的视频图像和分析所得的缺陷部位、损伤度存档,并输出至显示设备;
43、日常巡检单元包括:
44、更新模块,用于根据前次激光雷达采集点云,更新历史城镇街区三维地图;
45、结构损伤确认模块,用于按照规划的最优巡检路径行走至目标位置,并在移动巡检过程中连续拍摄巡检视频,确认可能存在的结构损伤;
46、目标图像获取模块,通过利用图像识别算法对巡检图像与作为目标参考图像的上次存档内容进行对比分析,若二者重合则将该巡检图像视为目标图像;
47、第二特征提取模块,用于对目标图像进行特征提取和分析,获取关键特征物;
48、计算模块,通过利用损伤度评估算法和修复完成度算法计算损伤度和修复完成度,并将结果输出到显示设备或存储设备。
49、经由上述的技术方案可知,与现有技术相比,本发明公开了一种木结构历史建筑结构构件表征损伤的鉴定方法及系统,能够利用四足机器人及图像识别算法技术对木结构历史建筑结构构件的损伤进行表征和鉴定,并计算修复完成度,为保护和修复历史建筑提供了一种有效的技术支持;利用云平台技术,将历史城镇巡检工作进行数字化再造,能够提升四足机器人与历史城镇运维管理人员的实时互动效率,提高历史城镇木结构质量安全的保证效力。
- 还没有人留言评论。精彩留言会获得点赞!