一种基于IVMD-IAO-BiLSTM的滑坡位移预测方法
本发明涉及地质灾害防治领域,尤其涉及一种滑坡地质灾害预报预测方法。
背景技术:
1、作为一种数量多、危害大的自然灾害,滑坡在世界范围内频发,严重威胁人们的生命财产安全。因此,滑坡灾害的预警至关重要。由于地表位移可以直观地反映滑坡的演化过程,因而准确预测滑坡位移是建立可靠预警系统的有效手段。但滑坡是一种包含众多随机性、复杂性和不确定性因素的复杂非线性动态开放系统,其位移与各种诱发因素之间存在复杂的非线性关系,存在很大的不确定性,这对滑坡位移预测的精度造成了很大的挑战。
2、当前滑坡位移的预测模型未充分考虑模型预测时受到的结构参数的影响。且当前应用在滑坡位移预测领域中的遗传算法(ga)、粒子群算法(pso)优化算法存在搜索空间有限、容易陷入局部最优解、优化效率低、鲁棒性差问题,因而无法稳定、准确地找到模型的最优参数。因此,亟需一种搜索能力强、收敛速度快、寻优精度高、能够有效跳出局部最优解且稳定性和适用性好的优化算法,以便实现滑坡预测模型中各模型的调参工作。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种改进的优化算法及综合预测模型,以解决滑坡位移预测领域中用于调参的优化算法自身收敛速度慢、易陷入局部最优解、搜索空间有限、鲁棒性差问题,同时解决当前传统的滑坡位移预测模型调参困难以及精度低、适用性差的问题。
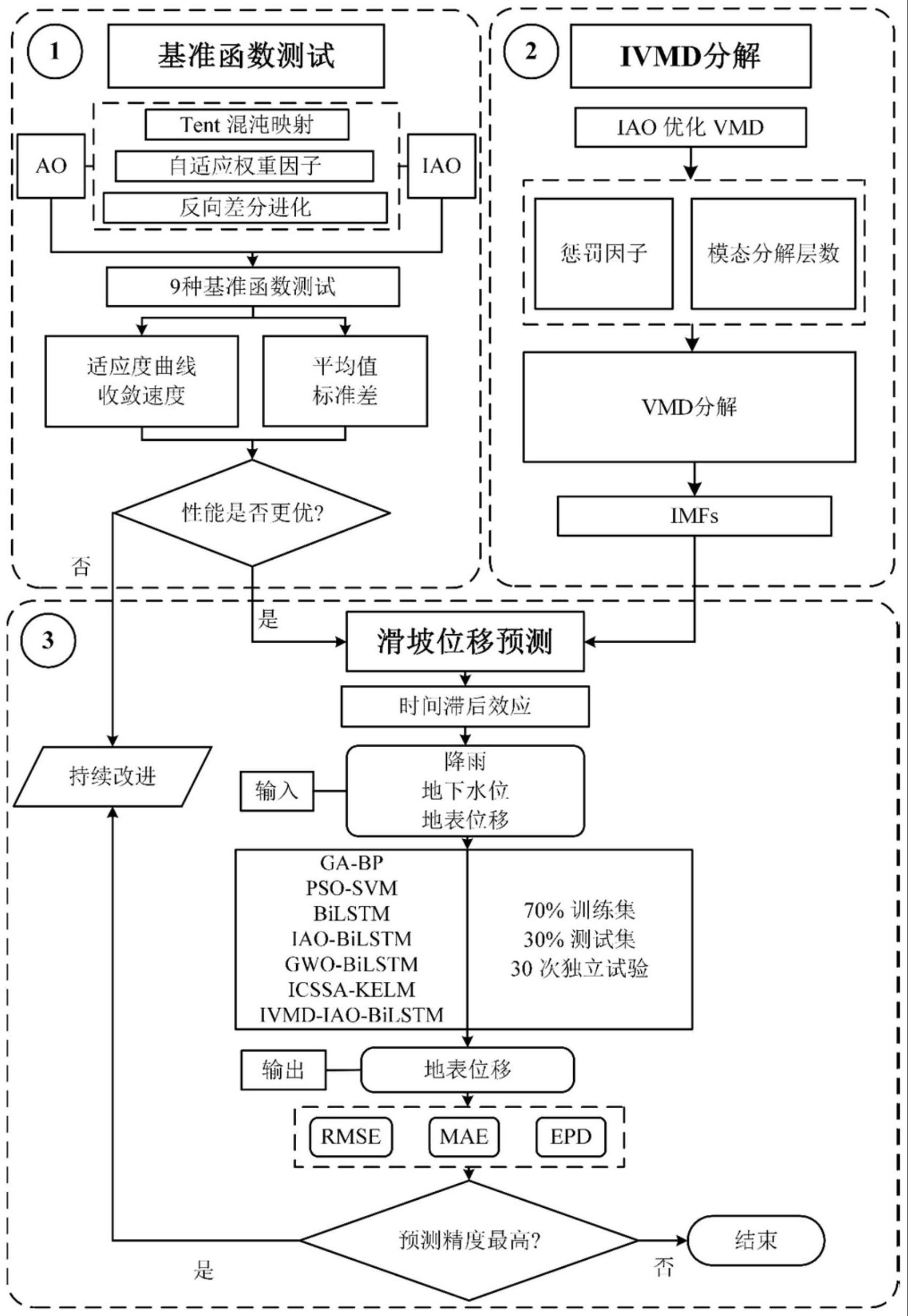
2、为实现上述目的,本发明提供了一种改进的天鹰优化算法(iao),即对传统的天鹰优化算法(ao)进行基于tent混沌映射的种群初始化策略、基于自适应权重因子的全局最优个体更新策略、基于反向差分进化的种群更新策略三方面的改进。
3、依托于iao,ao的基本原理如下:
4、ao算法模拟了天鹰在狩猎期间的行为,其优化过程用四种方法表示,分别为通过垂直弯腰的高翱翔选择搜索空间记为x1,通过短滑翔攻击的等高飞行在搜索空间内探索记为x2,通过慢速下降攻击的低空飞行在收敛搜索空间内探索记为x3,通过行走和抓取猎物进行俯冲记为x4;ao算法保证了在优化过程中不论在宽视野还是窄视野下都能成功进行搜索区域的创建,具体的四种狩猎方式如下:
5、对于x1,天鹰识别猎物区域并通过垂直弯腰的高翱翔来选择最佳狩猎区域;在这里,天鹰从高空翱翔来确定搜索空间的区域,即搜索猎物在哪里,这种行为在数学上表示为式(1);
6、
7、式(1)中,x1(t+1)表示第一种狩猎方式x1生成的t+1次迭代的解,xbest(t)表示第t次迭代的最优解,代表猎物的大致位置,表示用于通过迭代次数控制扩展搜索,rand表示[0,1]的随机值,t和t分别表示当前迭代和最大迭代次数,xm(t)表示当前解决方案在第t次迭代时的平均值,即a表示候选解的个数,d表示问题的维度,i表示第i个候选解,j表示第j个维度;
8、对于x2,当天鹰从高空找到猎物区域时,会在目标猎物上方盘旋,准备好发动攻击,这种方法称为短滑翔攻击的等高飞行;此时,天鹰优化算法狭窄地探索目标猎物的选定区域,为攻击做准备,这种行为在数学上表示为式(2);
9、x2(t+1)=xbest(t)×levy(d)+xr(t)+(y-x)×rand (2)
10、式(2)中,x2(t+1)表示第二种狩猎方式v2生成的t+1次迭代的解,levy(d)表示levy飞行分布函数,即ra和rb为[0,1]中两个正态分布的随机数,β取值1.5,γ(x)=(x-1)!,xr(t)为第t次迭代时在[1,a]范围内取得的随机解,y和x表示搜索中的螺旋形状,即y=r×cos(θ),x=r×sin(θ),r=r1+u×d1,其中t1为1-20的固定周期指数,u取值0.0265,d1为从1到搜索空间长度的整数,w取值0.005;
11、对于x3,当天鹰锁定了捕食区域,天鹰准备好着陆和攻击,随后垂直下降并进行初步攻击来试探猎物的反映,这种行为称为低空飞行和慢速下降攻击,这种行为在数学上表示为式(3);
12、x3(t+1)=(xbest(t)xm(t))×α-rand+((ub-lb)×rand+lb)×δ (3)
13、式(3)中,x3(t+1)表示第三种狩猎方式x3生成的t+1次迭代的解,α和δ为取值在(0,1)之间的调整系数,ub、lb分别表示问题的上界和下界;
14、对于x4,当天鹰接近猎物时,它会根据猎物的随机运动在陆地上行走攻击猎物,这种行为在数学上表示为式(4);
15、x4(t+1)=qf×xbest(t)-(v1×x(t)×rand)-v2×levy(d)+rand×v1 (4)
16、式(4)中,x4(t+1)表示第四种狩猎方式x4生成的t+1次迭代的解,qf表示用于平衡搜索策略的质量函数,即v1表示天鹰跟踪逃跑猎物的各种运动,即v1=2×rand-1,v2为从2至0的递减值,表示天鹰在跟踪猎物过程中从第一个位置(1)到最后一个位置(t)的飞行斜率,即
17、依托于iao,对ao的改进包括以下步骤:
18、s1、采用遍历均匀性和收敛速度良好的tent映射对种群初始化进行混沌映射的改进,并将tent混沌映射生成的数据作为ao算法的初始种群位置信息,保留种群的搜索多样性,使得种群个体在搜索过程中被赋予跳出局部最优解的能力,同时提高ao算法的收敛速度和全局搜索能力;所采用的tent映射表达式和扰动公式具体如式(5)-式(7)所示;
19、
20、xi+2,j=xi+1,j×(ub-lb)+lb,i=0,1,2…,n;j=1,2,…,d (6)
21、newx′=(x′+x)/2 (7)
22、其中,式(5)表示生成混沌序列,xi+1,j为经过tent映射后的第j维第i+1只天鹰个体位置,xi,j为第j维第i只天鹰个体位置,n为种群规模,d为问题维度;式(6)表示将式(5)生成的值xi+1,j变换到待优化变量的取值范围[lb,ub]内,xi+2,j为在j维空间内新生成的值,lb、ub分别表示调参优化问题的下界和上界;式(7)表示混沌扰动,newx′为经过混沌扰动后的个体,x′为待混沌扰动的个体,x为生成的混沌扰动变量。
23、s2、采用一种自适应权重因子η,在迭代初期,让天鹰以更快速度移动,快速到达目标值附近,在迭代后期,让天鹰以更慢速度移动,平衡ao算法中前期的全局搜索和后期的局部搜索能力,不易出现陷入局部最优的困扰,具体计算公式如式(8)、式(9)所示;
24、x(t+1)=ηxbest(t) (8)
25、
26、其中,ε为[0,1]区间内的随机数,x(t+1)为第t+1次迭代的解,xbest(t)为第t次迭代的最优解,t和t分别表示当前迭代和最大迭代次数,e为自然对数的底数。
27、s3、将具有良好的鲁棒性和全局寻优能力的反向差分进化算法融入到ao算法中,提升收敛精度和全局寻优能力;将反向学习策略应用到种群进化过程的每一次迭代中,得到越来越好的种群个体;设置跳跃概率θ,θ为设置的随机实数;每当完成一次种群个体更新(变异、交叉、选择)时,则依概率θ决定是否对更新个体进行反向学习优化选择;在进化迭代过程中,计算反向个体时用当前进行代的变量范围|lj,uj|来代替初始变量范围|lbj,ubj|,即式(10);随着迭代过程的进行,当前的变量范围远小于初始的变量范围,这将使得进化种群快递地逼近最优解;
28、oi,j=lj+uj-pi,j,i=1,2,…,n;j=1,2,…,d (10)
29、式(10)中,pi,j与oi,j分别表示种群和反向种群第j维度的第i个体,lj、uj分别为第j维度的问题的下界和上界。
30、s4、在j维度下,通过式(11)对在第t代的每一个种群个体进行变异操作,得到相应的变异个体vi(t);
31、
32、其中,vi(t)表示第t代中第i个个体变异后的变异个体,t1,r2,r3∈{1,2,…,n}表示从种群中选择的互不相同的随机父代序号,为父代基向量,表示父代差分向量,ζ表示缩放比例因子,用于控制变异的概率,通常取0.5。
33、s5、在第t代中,通过式(12)对生成的变异个体进行交叉操作,生成试验个体ui,j;
34、
35、其中,rand为区间[0,1]上均匀分布的随机数,cr表示在[0,1]之间的交叉算子,rand i(1,d)为在{1,2,…,d}之间的随机数;xi,j为第j维度第i个个体,当随机数小于等于交叉算子,个体采取交叉变异操作,否则不变异。
36、s6、在第t代中,通过式(13)进行选择操作,选择种群适应度最优的个体作为下一代种群中的个体;
37、
38、式(13)中,f(ui,j(t+1))为第t+1代第j维度第i个天鹰个体ui,j(t+1)的适应度,f(xi,j(t))为ui,j(t+1)的父代的适应度,将二者进行对比,保留更优的个体xi,j(t+1)作为下一代的父代个体。
39、s7、在搜索最优解的过程中,对当前解和反向解同时进行搜索,把其中更好的解作为问题解,进而扩大搜索范围,并提升算法的搜索效率;在反向学习策略中,反向解的计算公式如式(14)所示;
40、
41、其中,xi,j(t)是种群在第j维度上的第i个解;为对应xi,j(t)的反向解;ubj(t)、lbj(t)分别为第t次迭代过程中,问题在第j维上的搜索范围的上限和下限;参数k用来决定反向学习的类型,为(0,1)中的随机数。
42、综上,改进的天鹰优化算法iao的实现步骤如下:
43、s1、设置以下参数:种群规模n、最大迭代次数t、搜索空间维度d,并对全局最优位置及其适应度进行初始化;
44、s2、利用基于tent混沌映射的种群初始化策略得到初始种群p;
45、s3、通过反向学习策略计算反向种群o;
46、s4、分别计算初始种群和反向种群的适应度,并从集合{p∪o}中选择n个适应度最低的个体构成最优初始种群;
47、s5、计算最优初始种群的适应度值,随后判断是否满足若满足,通过天鹰优化算法ao的第一种狩猎方式x1和第二种狩猎方式x2更新天鹰位置;若不满足则通过第三种狩猎方式x3和第四种狩猎方式x4更新天鹰位置,并更新全局最优位置及其适应度;
48、s6、每一个天鹰个体更新完位置后,分别对找到的原解进行变异、交叉和选择操作,生成新解,并对比原解与新解,选择最优解的个体进入到下一轮迭代,并更新全局最优位置及其适应度;
49、s7、利用反向学习策略生成个体反向解,并对比原解与反向解,选择最优解的个体进入到下一轮迭代,并更新全局最优位置及其适应度;
50、s8、利用基于自适应权重因子的全局最优个体更新策略生成新的全局最优位置及其适应度值,并与s7得到的结果进行对比,选择最优解进行更新;
51、s9、判断ao算法是否达到最大迭代次数,若已达到,则输出最优参数,否则迭代次数加1,并跳至s5继续寻优。
52、依托于iao与ivmd,本发明提供了一种滑坡位移综合预测模型ivmd-iao-bilstm,利用该模型的滑坡位移预测方法具体步骤如下:
53、s1、在滑坡场地内布置监测点,通过gps卫星定位监测滑坡地表位移,通过监测设备对地表位移的影响因子进行监测,获取监测数据;
54、s2、对原始数据进行归一化、异常值、缺失值的预处理,若存在异常值,则剔除,若存在缺失值,则通过邻近位置均值处理方法对缺失值进行补充处理;
55、s3、考虑时间滞后效应,采用斯皮尔曼相关系数,在设定置信水平下识别影响因子与预测对象的滞后天数g,并将前g天的影响因子数据一同作为预测模型输入;
56、s4、通过改进的变分模态分解方法ivmd,将预处理后的滑坡位移数据分解为l个模态分量imf,包括:通过改进的天鹰优化算法iao对变分模态分解vmd的惩罚因子和模态分解层数两个参数进行调参优化,使得vmd能够稳定找到全局最优解,避免陷入局部最优解;
57、s5、构建每个模态分量的训练集和测试集,将每个模态分量的训练集及预测对象的影响因子数据输入预测模型中,得到各模态分量的滑坡位移预测结果;
58、所述预测模型采用双向长短期记忆神经网络bilstm,通过改进的天鹰优化算法iao对bilstm的第一层隐含层的单元个数、第二层隐含层的单元个数、训练次数和学习率四个超参数进行调参优化,进而寻找到最优的超参数,提高bilstm对复杂数据特征的学习能力以及预测的准确率;
59、s6、将l个模态分量的滑坡位移预测结果累加,并进行反归一化,得到最终的滑坡位移预测结果。
60、本发明具有以下有益效果:
61、1、提出了一种改进的天鹰优化算法(iao),解决了当前在滑坡位移预测领域中多数优化算法存在的搜索空间有限、容易陷入局部最优解、收敛速度慢、鲁棒性差问题。
62、2、提出了一种改进的变分模态分解模型(ivmd),能够快速稳定地确定最优的模态分解层数和惩罚因子参数,提高分解结果的准确性。
63、3、提出了一种新的滑坡位移综合预测模型ivmd-iao-bilstm,iao能够稳定找到bilstm第一层隐含单元个数、第二层隐含单元个数、训练次数和学习率四个超参数的最优值,进而提高滑坡位移预测的精度。
64、4、所采用的bilstm解决了传统循环神经网络中误差传递造成的梯度消失或爆炸问题,实现了对长时间序列信息的有效处理。
65、5、相较于lstm,bilstm能够同时考虑数据的过去和未来信息,弥补了单向lstm无法将后向编码为前向信息的缺陷,更适合处理滑坡位移这种前后有联系的时间序列。
66、6、作为一种综合预测模型,ivmd-iao-bilstm相较当前的经验模型,统计模型,非线性模型,通过多模型处理,预测精度高,能够解决经验模型依赖经验判据,且应用条件严格、适用性弱的问题,以及统计模型难以处理的诱因复杂的多因素问题和非线性模型难以处理的收敛速度慢且容易陷入局部极小值问题。
67、7、经基准函数测试,改进后的天鹰优化算法(iao)相较传统的天鹰优化算法(ao),收敛速度更快,寻优精度更高,寻优实时性表现好,鲁棒性强,且迭代前期的搜索性能和迭代末期的开拓性能更优,在保证开拓能力的同时也能充分保证搜索能力,不失种群多样性和寻优稳定性。
68、8、经多个滑坡位移预测实例的测试试验,相较于粒子群算法优化支持向量机预测模型(pso-svm),遗传算法优化bp神经网络预测模型(ga-bp),灰狼优化算法优化双向长短期记忆神经网络预测模型(gwo-bilstm),基于tent混沌映射、高斯变异的麻雀搜索算法优化核极限学习机(icssa-kelm),ivmd-iao-bilstm预测表现更佳,均方根误差和平均绝对误差更小,能够良好地描述滑坡地表位移的波动变化特征,在地表位移变化大的地方保证了更小的误差,符合预测走势,具有稳定和精确的预测性能。
69、9、经滑坡地下水位预测案例的测试试验,相较于粒子群算法优化支持向量机预测模型(pso-svm),遗传算法优化bp神经网络预测模型(ga-bp),灰狼优化算法优化双向长短期记忆神经网络预测模型(gwo-bilstm),基于tent混沌映射、高斯变异的麻雀搜索算法优化核极限学习机(icssa-kelm),ivmd-iao-bilstm预测表现更佳,均方根误差和平均绝对误差更小,能够抓住地下水位变化的趋势,符合预测走势,预测精度高,适用性强。
70、10、ivmd-iao-bilstm预测模型的适用性广,不仅在滑坡位移预测领域表现优异,在其他水文地质领域的预测中也保持了很高的精度,同时为预测领域常忽略的调参工作提供了一定的参考意义。
- 还没有人留言评论。精彩留言会获得点赞!