一种基于点云的树木骨架构建与树木结构化参数提取方法
本发明涉及一种单株树木骨架构建与参数提取,尤其是涉及一种基于点云的树木骨架构建与树木结构化参数提取方法。
背景技术:
1、树木骨架是树木复杂几何形状的一种简化表示方式,其通过点与点之间的线段表示树木的几何拓扑结构。构建与树木几何结构相符的树木骨架并由此提取树木几何结构参数,如树干高度、树枝长度、树枝生长高度、树枝与依附生长的树干或树枝的角度等,构建的骨架与提取的参数对研究树木的生长规律、生长趋势具有重要的意义。现有树木骨架构建方法构建的树木骨架不能贴近树木的真实几何结构,不能表示树木骨架中的树干、一级枝、二级枝等树木组成结构信息,更无法从中提取树木的结构化参数,如树干高度、树枝高度与长度(一级枝、二级枝),树枝数量(如一级枝个数、二级枝个数、一级枝上二级枝的个数),树干或树枝在某一位置处的生长方向等。
技术实现思路
1、有鉴于此,本发明的目的提供一种基于点云的树木骨架构建与树木结构化参数提取方法,能够准确构建可以反映树木几何拓扑结构及树木组成元素的树木骨架,并提取树木的结构化参数。
2、为达到上述目的,本发明采用以下技术方案:
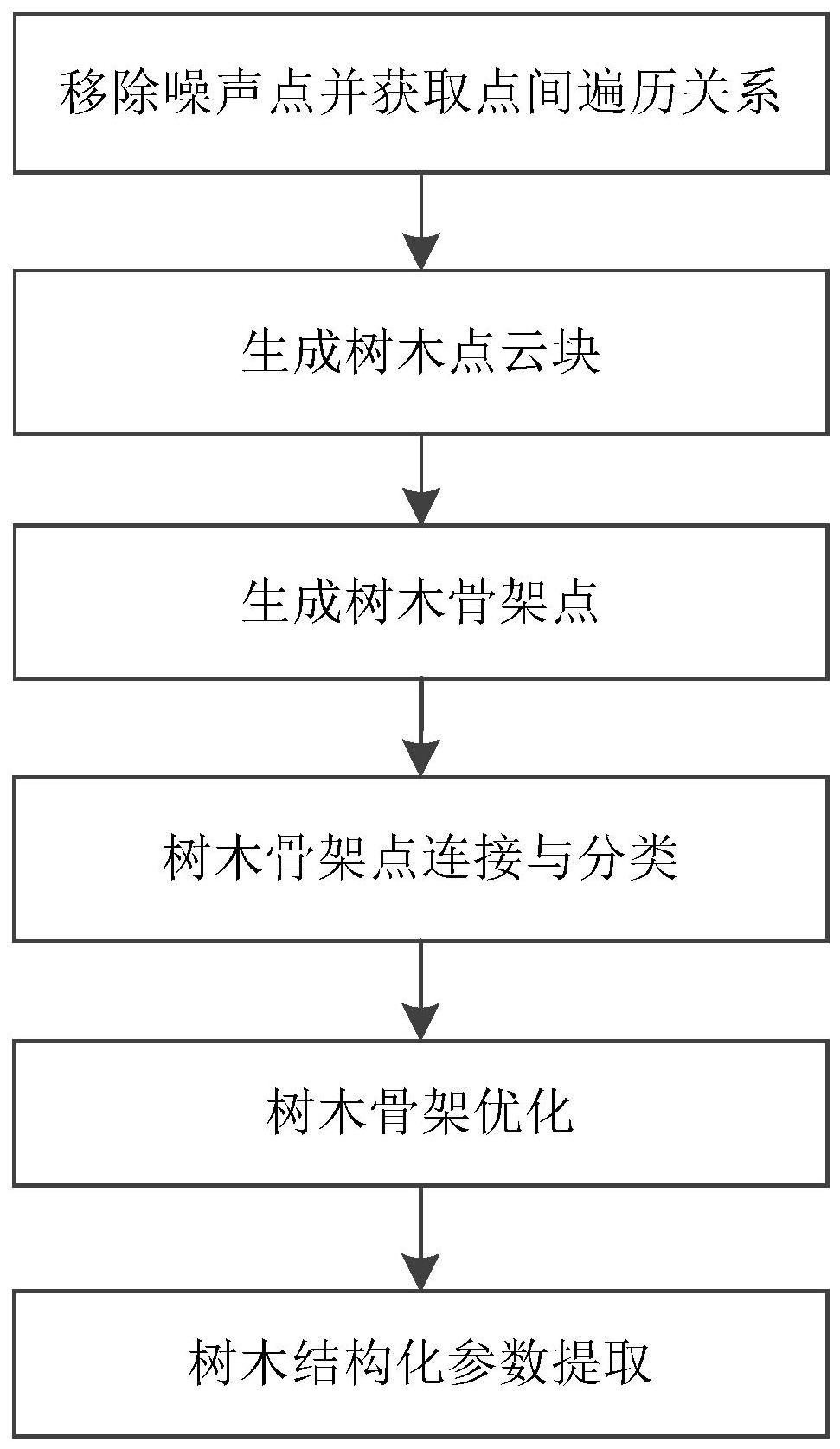
3、一种基于点云的树木骨架构建与树木结构化参数提取方法,包括如下步骤:
4、步骤1,移除噪声点并获取点间遍历关系;
5、步骤2,生成树木点云块;
6、步骤3,生成树木骨架点;
7、步骤4,树木骨架点连接与分类;
8、步骤5,树木骨架优化;
9、步骤6,树木结构化参数提取。
10、优选的,所述步骤1,移除噪声点并获取点间遍历关系包括:
11、步骤101,移除噪声点,包括:以地面三维激光扫描仪扫描一株树木得到的树木点云p0为输入数据,以选定的邻域距离半径eps与邻域距离半径eps中点的最小个数minpts为参数,对树木点云执行基于密度的聚类算法dbscan,得到多个点数量大小不同的聚类簇;参数eps与minpts值的选择应使得这些聚类簇中点的数量最多的一个簇能覆盖树木80%高度以上的点,此时该数量最多的一个簇即是提取树木骨架的树木点云p,其它簇均是噪声点并进行移除;
12、步骤102,获取点间遍历关系,包括:以树木点云p为输入,再次以参数邻域距离半径eps与minpts值执行dbscan算法,其过程如下:从树木点云p中z轴最小的点开始遍历,按照点坐标的z值升序的形式逐一对点遍历,并计算点遍历的先后次序关系;具体为:对一个点pi(xi,yi,zi),若点pj位于点pi的邻域距离半径eps范围内,且pj的先序节点未标注,则标注pj的先序节点为pi;若点pi是第一个开始遍历的点,则点pi的先序节点是其自身;由于树木点云p是步骤101中得到的一个完整的聚类簇,因此树木点云p中的每一个点都有一个先序节点,即可获取到树木点云p中点间的遍历关系。
13、优选的,所述步骤2,生成树木点云块,包括:
14、根据预设的高度参数h与树木点云p在z轴上的最小值zmin与最大值zmax,将树木点云p划分为个垂直分段,每个垂直分段高度均为h;然后对每个垂直分段分别执行以参数eps与minpts的dbscan聚类算法,在每一个垂直分段上得到多个聚类簇,每个聚类簇是一个树木点云块pi,所有垂直分段的所有聚类簇构成所有的树木点云块,所有树木点云块的并集即为树木点云p。
15、优选的,所述步骤3,生成树木骨架点,包括:对于第k个垂直分段的一个树木点云块pi,将pi投影至平面z=zmin+h*k(zmin是树木点云p在z轴上的最小值,得到一个投影点集pi′,计算投影点集pi′的凸包多边形的质心点ci,构建插值于凸包点的一条闭合三次bezier曲线,该闭合曲线的长度除以2π即得到树木点云块的半径r;以质心点ci为反演中心,r为反演半径,对于pi′中的一个点pj′∈pi′,计算点pj′的反演点pj″使得cipj′·cipj″=r2,并称pj′是pj″的对应点;对pi′中所有点执行点反演计算得到点集pi′的一个反演点集pi″,计算反演点集pi″的凸包,然后获取凸包中每一个点在树木点云块pi中的对应点,并依照次序构建一个多边形,计算该多边形的质心点ci′并作为树木点云块pi的树木骨架点;一个树木点云块对应一个树木骨架点,对所有树木点云块进行上述计算得到所有树木点云块的树木骨架点。
16、优选的,所述步骤4,树木骨架点连接与分类,包括:
17、步骤401,树木点云块pi是树木点云p的子集,因此可根据树木点云p中点间的遍历关系计算树木点云块pi与树木点云块pj的先后遍历关系,即可得到树木骨架点间的先后连接关系,包括:对树木点云块pi中点的先序节点做归属个数统计并做降序排列,若树木点云块pi中点的先序节点属于树木点云块pj个数的降序排列第一,即树木点云块pi中点的先序节点属于树木点云块pj的数量最多,则树木点云块pi的先序树木点云块为pj,对应的,树木点云块pi的树木骨架点ci′的先序节点为树木点云块pj的树木骨架点cj′,即ci′是cj′的子节点,cj′是ci′的父节点;逐一对树木点云块执行上述操作,得到树木骨架点间的先后连接关系;
18、步骤402,根据树木骨架点间的先后连接关系,定义每一个树木骨架点的权重;对于一个树木骨架点,其权重等于其所有子节点的数量之和与所有子节点的权重之和;若一个树木骨架点没有子节点,则其权重为0;
19、步骤403,根据树木骨架点的权重,对树木骨架点进行分类;包括:权重最大的树木骨架点为树木树干骨架点的第一个节点;对于一个骨架点,若其只有一个子节点,则子节点与父节点属于同种类别,若其有多个子节点,则权重最大的子节点与其父节点属于同种类别,其他子节点类别是其父节点类别的下一级,若有两个子节点的权重相等且同时是权重最大的子节点,则分别计算子节点、父节点、父节点的父节点这3个点构成的夹角,夹角最大的子节点的类别与其父节点类别相同,其它子节点类别均是其父节点类别的下一级;经过上述过程,完成对每一个树木骨架点的分类。
20、优选的,所述步骤5,树木骨架优化,包括:
21、步骤501,获取树干在树干骨架点处的生长方向,包括:对于一个树干骨架点ci,连续取m个ci的父节点,m的取值范围为3<m<30/h,即ci的父节点是第1个,ci的父节点的父节点是第2个,以此类推,采用主成分分析方法计算这m个节点的最大特征值对应的特征向量,并以此特征向量的z轴方向为正,作为树干ci处的生长方向;
22、步骤502,树干骨架点的优化,包括:对于一个树干骨架点ci,取ci的父节点与ci的子节点(且要求该子节点也是树干骨架点),计算这3个点构成夹角的角度值,若不小于预设值则执行步骤503;若小于预设值则对树干骨架点ci进行位置优化,其优化执行过程如下:计算树干在树干骨架点ci处的生长方向,然后以ci的父节点为起始节点,沿着树干生长方向取其与ci的父节点距离为h的点作为ci优化后的位置;步骤502从第4个树干骨架点开始,按照树干骨架点的高度降序次序逐一执行;
23、步骤503,一级枝与树干结合处的位置优化,包括:一级枝的第1个骨架点、第2个骨架点直至第m个骨架点,m的取值范围为3<m<30/h,采用主成分分析方法计算这m个节点的最大特征值对应的特征向量作为树枝的生长方向,z轴方向为正;计算树干在一级枝与树干结合位置处的树干骨架点处的生长方向,沿着此生长方向的正向或逆向寻找一个点,使得一级枝的第1个骨架点与该点之差形成的方向向量与树枝的生长方向的夹角最小,则该点是一级枝与树干的最佳结合位置。
24、优选的,所述步骤6,树木结构化参数提取,包括:
25、步骤601,根据树木骨架点的类别可分别提取树木骨架的树干骨架与树枝骨架,所述树枝骨架包括一级枝骨架、二级枝骨架与三级枝骨架;
26、步骤602,提取树干骨架高度,即树干骨架高度的最大值与最小值之差;
27、步骤603,根据提取的树木不同类别的树枝骨架,计算树枝长度;
28、步骤604,获取树枝生长高度;
29、步骤605,获取树枝数量,包括:遍历树木骨架中一级枝、二级枝与三级枝并计数,得到树枝数量;
30、步骤606,获取子级树枝与其父级树枝间的夹角;
31、步骤607,树干或树枝在特定骨架点位置处的生长方向。
32、本发明的有益效果是:
33、本发明以地面三维激光扫描仪扫描获取的树木点云为数据,构建一种可准确反映树木几何形状特征及树木组成结构特征的树木骨架,并根据骨架提取树木的结构化参数。本发明能够准确构建可以反映树木几何拓扑结构及树木组成元素(树干、一级枝、二级枝等)的树木骨架,并可从中提取树木的结构化参数,为准确构建树木的精细化骨架与树木结构化参数提取技术支撑,为研究树木的生长状态、生长规律与生长趋势提供数据依据,为树木精确测量与森林精准经营提供技术支撑。
34、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!