驾驶人风险敏感度差异化表征方法、装置、设备及介质
本技术涉及智能汽车应用,特别涉及一种驾驶人风险敏感度差异化表征方法、装置、设备及介质。
背景技术:
1、行车安全与驾驶人在涉及导致碰撞或接近碰撞事件的高风险场景中采取的避免碰撞的决策直接相关。而驾驶决策很大程度上受驾驶人风险认知水平的影响。正常驾驶过程中,驾驶人对单一数量、类型的风险源的认知判断难以精准体现其真实复杂风险认知过程,且真实交通中多个风险源、多危险类型场景普遍存在。在复杂驾驶场景中存在多种风险源时,驾驶人的风险认知能力下降,其避障行为表现为消极,易产生交通事故。当面临同一风险场景时,驾驶人场景自适应与风险响应的能力具有差异性,有必要探究潜在影响因素或特质影响个体在风险情境下具备的不同表现。
2、对风险情况具有不同敏感度的驾驶人在相同关键场景时会在不同的时间做出反应,这种个性化差异将会对驾驶人的避障策略和是否造成碰撞事故都产生关键影响。一般而言,风险敏感度越高的驾驶人,碰撞事故发生可能性越小。即风险敏感度越高的驾驶人通常较早感知到潜在风险,可预留的采取避撞行动的反应时间充分,实现避障可能性更大。目前国内外对于驾驶人风险敏感度已有大量研究。
3、相关技术中,风险平衡理论(risk homeostasis theory,简称rht)阐述了驾驶人积极响应并抑制风险到安全裕度的行为。wilde首次提出该理论并解释了驾驶人在感知风险过程与最终自身能够接受的风险阈值间的关系。通常当两者相差较大时,会通过操作行为的调整实现主观和客观风险之间的差异性减小,从而维持稳定的风险水平。
4、相关技术中,风险规避理论(risk avoidance theory,简称rat)是指基于驾驶人学习能力来表征风险期望水平和驾驶人风险规避能力。在该理论中,驾驶人通过控制电子设备实现风险规避并安全抵达目的地。基于该理论可知,交通事故发生的背后原因是驾驶人难以应对突发风险并造成风险状态超出阈值范围,因此导致系统失控失稳。
5、相关技术中,风险感知模型(risk peception model,简称rpm)描述了基于改进后的驾驶动机模型,进一步以驾驶人主观风险感知的结果作为智能电子设备报警阈值匹配值。通过客观参数和主观感知水平的匹配,融入智能电子设备系统实现驾驶辅助,准确度较高。清华大学智能网联汽车课题组虞辰霏等人将其用作自适应驾驶人特性的前撞预警算法,并将驾驶人对风险的感知作为前撞报警阈值的匹配值。
6、上述相关技术中,风险敏感度建模或风险认知方法能在一定程度上解析不同驾驶人对同一交通场景中的风险敏感度和主观认知评价过程,能描述驾驶人辨别、预测、认知和评价不同交通场景下危险情境的能力。然而,这类方法主要聚焦安全评估和保证,多偏向于定性描述驾驶人风险敏感度的过程,缺乏对驾驶人风险敏感度充分表征的建模,未量化复杂多变的情况下不同驾驶人受其驾驶风格、驾驶技能等属性影响带来的场景风险辨识结果,难支撑基于驾驶人风险敏感度特性的智能电子设备应用安全避险过程,亟待解决。
技术实现思路
1、本技术提供一种驾驶人风险敏感度差异化表征方法、装置、设备及介质,以解决相关技术中,驾驶风险认知方法缺乏对驾驶人风险敏感度充分表征的建模,未量化复杂多变的情况下不同驾驶人受其驾驶风格、驾驶技能等属性影响带来的场景风险辨识结果,难支撑基于驾驶人风险敏感度特性的智能电子设备应用安全避险过程等问题,能够支持分析不同驾驶人风险敏感度对行车安全的影响,降低驾驶人驾驶过程或智能车辆行驶过程中的潜在碰撞风险,提高行车安全。
2、本技术第一方面实施例提供一种驾驶人风险敏感度差异化表征方法,包括以下步骤:
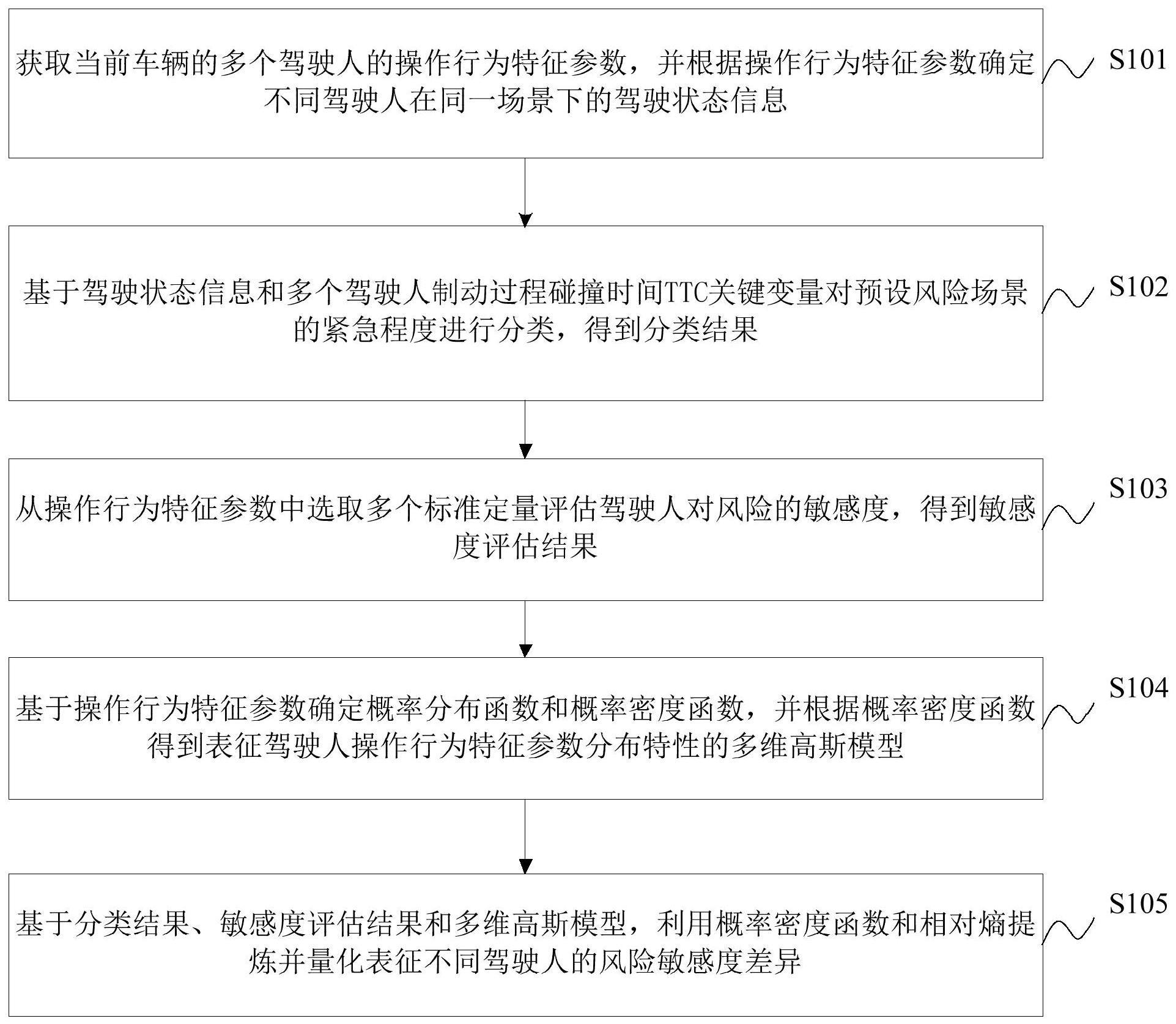
3、获取当前车辆的多个驾驶人的操作行为特征参数,并根据所述操作行为特征参数确定不同驾驶人在同一场景下的驾驶状态信息;
4、基于所述驾驶状态信息和所述多个驾驶人制动过程碰撞时间ttc(time-to-collision,碰撞时间)关键变量对预设风险场景的紧急程度进行分类,得到分类结果;
5、从所述操作行为特征参数中选取多个标准定量评估所述驾驶人对风险的敏感度,得到敏感度评估结果;
6、基于所述操作行为特征参数确定概率分布函数和概率密度函数,并根据所述概率密度函数得到表征驾驶人操作行为特征参数分布特性的多维高斯模型;以及
7、基于所述分类结果、所述敏感度评估结果和所述多维高斯模型,利用所述概率密度函数和相对熵提炼并量化表征所述不同驾驶人的风险敏感度差异。
8、可选地,在一些实施例中,所述获取当前车辆的多个驾驶人的操作行为特征参数,并根据所述操作行为特征参数确定不同驾驶人在同一场景下的驾驶状态信息,包括:搭建驾驶人风险认知行为测试平台;利用所述驾驶人风险认知行为测试平台采集所述多个驾驶人在驾驶过程的动态搜索注意行为特征信号、认知反应行为特征信号和决策操控行为特征信号;根据所述动态搜索注意行为特征信号、所述认知反应行为特征信号和所述决策操控行为特征信号得到所述操作行为特征参数。
9、可选地,在一些实施例中,所述从所述操作行为特征参数中选取多个标准定量评估所述驾驶人对风险的敏感度,包括:基于所述操作行为特征参数,确定车辆的横向运动特征参数和纵向运动特征参数;基于所述横向运动特征参数中的横向加速度和所述纵向运动特征参数中纵向加速度评估所述驾驶人对风险的敏感度。
10、可选地,在一些实施例中,所述基于所述操作行为特征参数确定概率分布函数和概率密度函数,并根据所述概率密度函数得到表征驾驶人操作行为特征参数分布特性的多维高斯模型,包括:基于所述操作行为特征参数的分布特性的分析结果,获取所述驾驶人在不同场景下的响应特征;根据所述驾驶人在不同场景下的响应特征确定可用概率分布函数和概率密度函数,并基于所述概率密度函数得到所述多维高斯模型,以通过所述多维高斯模型表征所述驾驶人操作行为特征参数分布特性。
11、可选地,在一些实施例中,所述概率密度函数为:
12、
13、其中,x为随机变量,m为随机变量的维度,|σ|为协方差矩阵的行列式,μ=e[x]指随机变量x的均值。
14、可选地,在一些实施例中,所述多维高斯模型为:
15、
16、
17、其中,x为随机变量,为随机变量x均值的估计值,为协方差σ的估计值,n为高斯分布的样本总数,n为第n个样本数,xi为第i个随机变量,为随机变量x的均值。
18、可选地,在一些实施例中,所述相对熵为:
19、
20、其中,p为原有数据集分布,q为新数据集分布,x为随机变量。
21、本技术第二方面实施例提供一种驾驶人风险敏感度差异化表征装置,包括:
22、驾驶人操作行为信息获取模块,用于获取当前车辆的多个驾驶人的操作行为特征参数,并根据所述操作行为特征参数确定不同驾驶人在同一场景下的驾驶状态信息;
23、高风险场景紧急程度分类模块,用于基于所述驾驶状态信息和所述多个驾驶人制动过程碰撞时间ttc关键变量对预设风险场景的紧急程度进行分类,得到分类结果;
24、驾驶人操控行为特征参数选取模块,用于从所述操作行为特征参数中选取多个标准定量评估所述驾驶人对风险的敏感度,得到敏感度评估结果;
25、驾驶人操控行为分布特性表征模块,用于基于所述操作行为特征参数确定概率分布函数和概率密度函数,并根据所述概率密度函数得到表征驾驶人操作行为特征参数分布特性的多维高斯模型;以及
26、驾驶人风险敏感度差异表征模块,用于基于所述分类结果、所述敏感度评估结果和所述多维高斯模型,利用所述概率密度函数和相对熵提炼并量化表征所述不同驾驶人的风险敏感度差异。
27、可选地,在一些实施例中,所述驾驶人操作行为信息获取模块,包括:搭建单元,用于搭建驾驶人风险认知行为测试平台;采集单元,用于利用所述驾驶人风险认知行为测试平台采集所述多个驾驶人在驾驶过程的动态搜索注意行为特征信号、认知反应行为特征信号和决策操控行为特征信号;输出单元,用于根据所述动态搜索注意行为特征信号、所述认知反应行为特征信号和所述决策操控行为特征信号得到所述操作行为特征参数。
28、可选地,在一些实施例中,所述驾驶人操控行为特征参数选取模块,包括:确定单元,用于基于所述操作行为特征参数,确定车辆的横向运动特征参数和纵向运动特征参数;评估单元,用于基于所述横向运动特征参数中的横向加速度和所述纵向运动特征参数中纵向加速度评估所述驾驶人对风险的敏感度。
29、可选地,在一些实施例中,所述驾驶人操控行为分布特性表征模块,包括:获取单元,用于基于所述操作行为特征参数的分布特性的分析结果,获取所述驾驶人在不同场景下的响应特征;表征单元,用于根据所述驾驶人在不同场景下的响应特征确定可用概率分布函数和概率密度函数,并基于所述概率密度函数得到所述多维高斯模型,以通过所述多维高斯模型表征所述驾驶人操作行为特征参数分布特性。
30、可选地,在一些实施例中,所述概率密度函数为:
31、
32、其中,x为随机变量,m为随机变量的维度,|σ|为协方差矩阵的行列式,μ=e[x]指随机变量x的均值。
33、可选地,在一些实施例中,所述多维高斯模型为:
34、
35、
36、其中,x为随机变量,为随机变量x均值的估计值,为协方差σ的估计值,n为高斯分布的样本总数,n为第n个样本数,xi为第i个随机变量,为随机变量x的均值。
37、可选地,在一些实施例中,所述相对熵为:
38、
39、其中,p为原有数据集分布,q为新数据集分布,x为随机变量。
40、本技术第三方面实施例提供一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的驾驶人风险敏感度差异化表征方法。
41、本技术第四方面实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现如上述实施例所述的驾驶人风险敏感度差异化表征方法。
42、由此,本技术通过获取多个驾驶人操作行为信息,确定不同驾驶人在同一场景下的驾驶状态,基于驾驶状态和驾驶人制动ttc关键变量对高风险场景的紧急程度进行分类,选取驾驶人操控行为特征参数定量评估驾驶人对风险的敏感度,采用多维高斯分布表征驾驶人操控行为分布特性,基于概率密度函数和相对熵提炼并量化表征不同驾驶人的风险敏感度差异。由此,解决了缺乏对驾驶人风险敏感度充分表征的建模,未量化复杂情况下不同驾驶人对场景风险的辨识结果等问题,支持分析不同驾驶人风险敏感度对行车安全的影响,降低驾驶人驾驶过程或智能车辆行驶过程中的潜在碰撞风险,提高行车安全。
43、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!