基于改进暗通道先验的图像去雾方法及其系统
本发明属于图像处理,具体地,涉及一种基于改进暗通道先验的图像去雾方法及其系统。
背景技术:
1、雾霾、沙尘天气在严重影响人们健康的同时,也对计算机视觉系统的正常、有效运行提出了很大的挑战。
2、现有的图像采集设备对外界环境的干扰非常敏感,在雾霾环境中,获取的户外图像往往退化严重,主要表现为场景特征信息模糊,对比度低,色彩失真,不利于计算机视觉系统对图像的真实特征进行提取,从而影响其后续对图像的分析、理解和识别等一系列处理,很大程度上降低了视觉系统的实际应用性能,限制了图像的应用价值。
3、针对目前图像去雾技术存在的问题,通常采用单幅图像去雾算法,但单幅图像去雾算法通常是通过基于图像增强的去雾算法,从而提升图像的对比度和饱和度,增强图像的视觉显示效果,从而达到图像去雾的目的,然而现有技术中的这种去雾方法仅通过提高图像对比度增强图像的视觉效果,不考虑雾霾天气条件下成像过程中的图像降质的物理原因,所以往往不能有效的去除图像中的雾度信息,特别是在处理浓重雾霾天气条件下的图像,去雾效果特别不好。
技术实现思路
1、为解决上述背景技术中存在的现有技术中往往不能有效去除图像中的雾度信息的技术问题,本发明提供了一种基于改进暗通道先验的图像去雾方法及其系统。
2、本发明的目的可以通过以下技术方案实现:
3、一种基于改进暗通道先验的图像去雾方法,包括以下步骤:
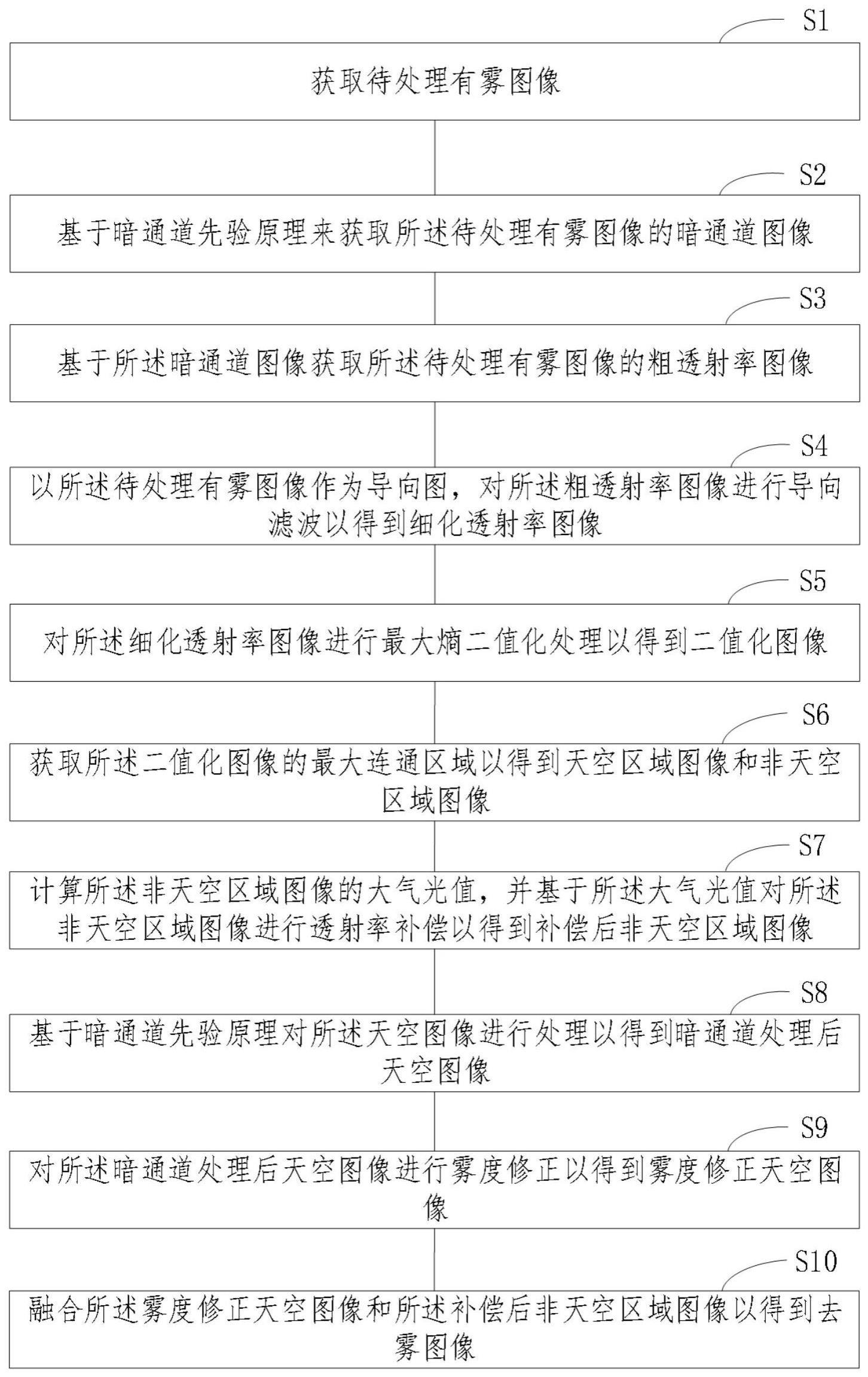
4、获取待处理有雾图像;
5、基于暗通道先验原理获取待处理有雾图像的暗通道图像;
6、基于所述暗通道图像获取待处理有雾图像的粗透射率图像;
7、以所述待处理有雾图像作为导向图,对所述粗透射率图像进行导向滤波处理,从而得到细化透射率图像;
8、对所述细化透射率图像进行最大熵二值化处理,得到二值化图像;
9、获取所述二值化图像的最大连通区域,从而得到天空区域图像和非天空区域图像;
10、计算所述非天空区域图像的大气光值,并基于所述大气光值对所述非天空区域图像进行透射率补偿,从而得到补偿后的非天空区域图像;
11、基于暗通道先验原理,对所述天空区域图像进行处理,从而得到暗通道处理后的天空区域图像;
12、对所述暗通道处理后天空区域图像进行雾度修正,从而得到雾度修正的天空区域图像;
13、融合所述雾度修正的天空区域图像和补偿后非天空区域图像,从而得到去雾图像。
14、进一步的,所述基于暗通道先验原理获取待处理有雾图像的暗通道图像,具体包括以下步骤:
15、确定待处理有雾图像的每个像素在r、g、b三个通道中的最小值;
16、对待处理有雾图像进行最小值滤波得到暗通道图像。
17、进一步的,所述暗通道的计算公式如下:
18、
19、jdark(x)→0
20、其中,x表示图像的每个像素点,ω(x)表示以像素x为中心的过滤窗口,y是属于过滤窗口的一个像素点,r、g、b表示图像的r、g、b三个通道,c是属于r、g、b三个通道中的一个通道,jc(y)表示清晰图像中y像素点的r、g、b三个通道的一个像素值,min表示最小值函数,jdark(x)表示暗通道图像在x像素点的像素值。
21、进一步的,所述基于所述暗通道图像获取待处理有雾图像的粗透射率图像,具体包括以下步骤:
22、计算暗通道图像的最小值并对暗通道图像的最小值进行归一化处理,得到粗透射率图像;
23、将粗透射率图像分解为多个分量。
24、进一步的,所述粗透射率的计算公式为:
25、
26、其中,x表示图像的每个像素点,ω(x)表示以像素x为中心的过滤窗口,y是属于过滤窗口的一个像素点,c是属于r、g、b三个通道中的一个通道,ic(y)表示有雾图像中y像素点的r、g、b三个通道的一个像素值,min表示最小值函数,ac表示r、g、b三个通道中的其中一个通道的大气光值,ω表示补偿,t(x)表示粗透射率图像在像素点x处的透射率。
27、进一步的,以所述待处理有雾图像作为导向图,对所述粗透射率图像进行导向滤波处理,从而得到细化透射率图像,具体包括以下步骤:
28、将所述待处理有雾图像作为导向图传递给导向滤波器;
29、所述导向滤波器利用导向图提供特征来优化粗透射率图像的平滑度;
30、通过优化后的透射率图像来过滤得到细化透射率图像。
31、进一步的,所述导向滤波的计算公式如下:
32、
33、
34、其中,i表示所述待处理有雾图像,wij为滤波器函数,pij为所述粗透射率图像在(i,j)处的灰度值,qij为所述细化透射率图像在(i,j)的灰度值,ωk为第k个核函数窗口,|ω|为窗口内的像素个数,μk和是所述待处理有雾图像在窗口内的均值和方差,ε为平滑因子。
35、进一步的,在获取所述待处理有雾图像的细化透射率图像后,使用最大熵二值化将天空区域和非天空区域进行区分,具体包括以下步骤:
36、通过将细化透射率图像分为背景和前景两部分;
37、通过最大熵算法计算出最佳阈值,使背景和前景两部分的熵之和最大,并将细化透射率图像分割成二值图像。
38、本技术还提供一种基于改进暗通道先验的图像去雾系统,应用前述的一种基于改进暗通道先验的图像去雾方法,包括:
39、有雾图像获取模块,用于获取待处理有雾图像;
40、暗通道先验处理模块,基于暗通道先验原理来获取所述待处理有雾图像的暗通道图像;
41、粗透射处理模块,用于基于所述暗通道图像获取所述待处理有雾图像的粗透射率图像;
42、导向滤波模块,用于以所述待处理有雾图像作为导向图,对所述粗透射率图像进行导向滤波以得到细化透射率图像;
43、二值化处理模块,用于对所述细化透射率图像进行最大熵二值化处理以得到二值化图像;
44、最大连通区域获取模块,用于获取所述二值化图像的最大连通区域以得到天空区域图像和非天空区域图像;
45、非天空区域图像补偿模块,用于计算所述非天空区域图像的大气光值,并基于所述大气光值对所述非天空区域图像进行透射率补偿以得到补偿后非天空区域图像;
46、天空区域图像处理模块,基于暗通道先验原理对所述天空区域图像进行处理以得到暗通道处理后天空区域图像;
47、雾度修正模块,用于对所述暗通道处理后天空区域图像进行雾度修正以得到雾度修正天空区域图像;
48、融合模块,用于融合所述雾度修正天空区域图像和所述补偿后非天空区域图像以得到去雾图像。
49、进一步的,所述暗通道先验处理模块,用于:基于暗通道先验原理以如下暗通道公式对来获取所述待处理有雾图像的所述暗通道图像;
50、其中,所述暗通道公式为:
51、
52、jdark(x)→0
53、其中,x表示图像的每个像素点,ω(x)表示以像素x为中心的过滤窗口,y是属于过滤窗口的一个像素点,r、g、b表示图像的r、g、b三个通道,c是属于r、g、b三个通道中的一个通道,jc(y)表示清晰图像中y像素点的r、g、b三个通道的一个像素值,min表示最小值函数,jdark(x)表示暗通道图像在x像素点的像素值。
54、本发明的有益效果:
55、本技术提供的一种基于改进暗通道先验的图像去雾方法及其系统,能够通过对雾天降质图像进行处理来得到无雾或少雾的图像,从而有效地处理去雾后天空效果不佳、亮度低、不自然的问题,便于后续图像用于检测跟踪等应用场景。
- 还没有人留言评论。精彩留言会获得点赞!