目标对象检测模型的训练方法及对象检测方法与流程
本公开涉及自动驾驶领域,尤其涉及一种目标对象检测模型的训练方法及对象检测方法。
背景技术:
1、在自动驾驶领域中,自动驾驶车辆的行驶速度预测、行驶方向预测、行驶规划以及车辆控制等都与目标检测模块有密切的联系。
2、目前,现有技术基于激光雷达可以实现三维对象检测,凭借高线束激光雷达可以实现对周围环境的厘米级精确建模,但是,该对象检测方法成本较高,因雨雪等环境原因还会产生定位精度下降的问题,极大地限制了激光雷达对象检测方法在自动驾驶领域的应用以及规模化落地;而现有技术中基于单目相机的三维对象检测方法,采用将二维图像送入模型学习三维信息并训练该模型,利用训练后的模型进行目标检测,因二维图像不包含深度信息,并且训练所用的标签较为单一,导致训练后的模型检测精度较低,进而带来基于该模型进行对象检测时得出的检测结果准确性欠佳等问题。
技术实现思路
1、本公开提供一种目标对象检测模型的训练方法及对象检测方法,以至少解决相关技术中三维对象检测网络模型的训练标签较为单一,训练后的网络模型检测准确性较低等问题。本公开的技术方案如下:
2、根据本公开实施例的一方面,提供一种目标对象检测模型的训练方法,包括:
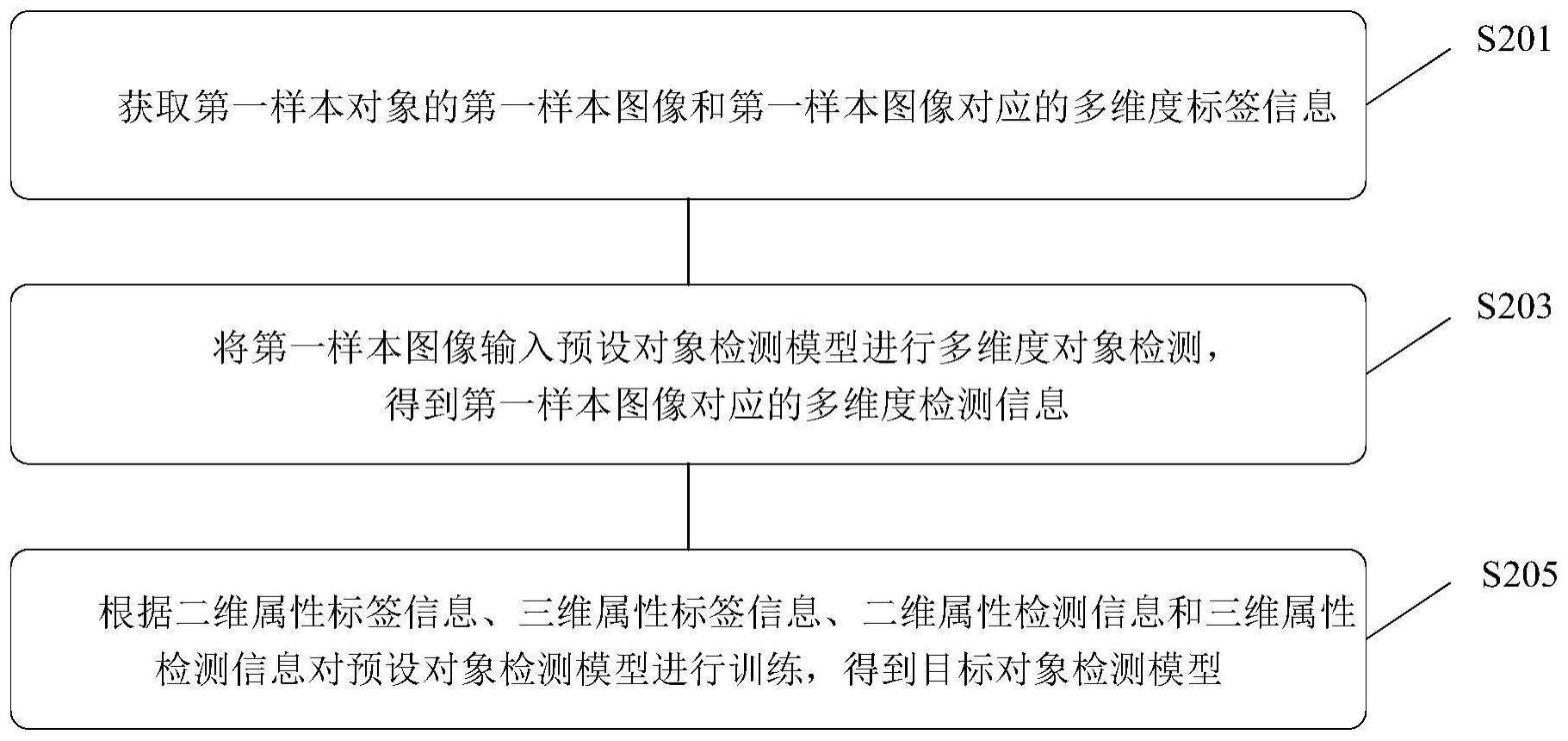
3、获取第一样本对象的第一样本图像和所述第一样本图像对应的多维度标签信息,所述多维度标签信息包括:二维属性标签信息和三维属性标签信息;
4、将所述第一样本图像输入预设对象检测模型进行多维度对象检测,得到所述第一样本图像对应的多维度检测信息,所述多维度检测信息包括二维属性检测信息和三维属性检测信息;
5、根据所述二维属性标签信息、所述三维属性标签信息、所述二维属性检测信息和所述三维属性检测信息对所述预设对象检测模型进行训练,得到目标对象检测模型。
6、根据本公开实施例的另一方面,提供一种对象检测方法,包括:
7、获取待检测的目标对象对应的目标图像;
8、将所述目标图像输入,基于所述目标对象检测模型的训练方法所得到的目标对象检测模型进行多维度对象检测,得到所述目标图像对应的多维度目标检测信息,所述多维度目标检测信息包括:预测三维属性检测信息;
9、将所述预测三维属性检测信息中的三维检测信息、类别检测信息、中心点检测信息和欧拉角检测信息,作为所述目标图像对应的对象检测结果。
10、根据本公开实施例的另一方面,提供一种目标对象检测模型的训练装置,包括:
11、样本图像获取模块,用于获取第一样本对象的第一样本图像和所述第一样本图像对应的多维度标签信息,所述多维度标签信息包括:二维属性标签信息和三维属性标签信息;
12、样本对象检测模块,用于将所述第一样本图像输入预设对象检测模型进行多维度对象检测,得到所述第一样本图像对应的多维度检测信息,所述多维度检测信息包括二维属性检测信息和三维属性检测信息;
13、检测模型生成模块,用于根据所述二维属性标签信息、所述三维属性标签信息、所述二维属性检测信息和所述三维属性检测信息对所述预设对象检测模型进行训练,得到目标对象检测模型。
14、根据本公开实施例的另一方面,提供一种对象检测装置,包括:
15、目标图像获取模块,用于获取待检测的目标对象对应的目标图像;
16、目标对象检测模块,用于将所述目标图像输入,用于基于所述目标对象检测模型的训练方法所得到的目标对象检测模型进行多维度对象检测,得到所述目标图像对应的多维度目标检测信息,所述多维度目标检测信息包括:预测三维属性检测信息;
17、检测结果生成模块,用于将所述预测三维属性检测信息中的三维检测信息、类别检测信息、中心点检测信息和欧拉角检测信息,作为所述目标图像对应的对象检测结果。
18、根据本公开实施例的另一方面,提供一种目标对象检测模型训练电子设备,包括:
19、处理器;
20、用于存储所述处理器可执行指令的存储器;
21、其中,所述处理器被配置为执行所述指令,以实现本公开实施例中任一项所述的目标对象检测模型的训练方法或本公开实施例中任一项所述的对象检测方法。
22、根据本公开实施例的另一方面,提供一种目标对象检测模型训练存储介质,包括:
23、当所述存储介质中的指令由电子设备的处理器执行时,使得所述电子设备能够执行本公开实施例中任一项所述的目标对象检测模型的训练方法或本公开实施例中任一项所述的对象检测方法。
24、根据本公开实施例的另一方面,提供一种包含指令的计算机程序产品,当其在计算机上运行时,使得计算机执行本公开实施例中任一项所述的目标对象检测模型的训练方法。
25、本公开的实施例提供的技术方案至少带来以下有益效果:
26、在对目标对象进行检测的过程中,首先获取样本对象的样本图像和样本图像对应的多维度标签信息,通过获取多维度标签信息可以更全面地获取的样本对象的二维特征和三维特征,再将样本图像输入预设对象检测模型进行多维度对象检测,得到样本图像对应的多维度检测信息,基于多维度检测信息和多维度标签信息对预设对象检测模型进行训练,其中,利用二维属性标签与二维属性检测信息可以约束目标对象的检测位置,加强模型对目标对象的判别,利用三维属性标签与三维属性检测信息可以使模型实现对三维目标对象的检测,得到目标对象所处世界坐标系下的三维信息,因此,通过多维度检测信息和多维度标签信息对预设对象检测模型进行训练提高模型的精度,得到检测精度较高的目标对象检测模型,使得用户能够利用该目标对象检测模型对自动驾驶中待检测的目标对象进行检测,并得到较为准确的检测结果,提升对象检测方法的准确性,进而也可以提升驾驶安全性。
27、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
技术特征:
1.一种目标对象检测模型的训练方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述预设对象检测模型包括特征提取层、特征融合层和检测输出层;所述将所述第一样本图像输入所述预设对象检测模型进行多维度目标对象检测,得到所述第一样本图像对应的所述多维度检测信息,包括:
3.根据权利要求1所述的方法,其特征在于,所述二维属性标签信息包括:热力图标签和正负样本标签;所述二维属性标签信息包括采用下述方式获取:
4.根据权利要求1所述的方法,其特征在于,所述三维属性标签信息包括:关键点标签、深度信息标签、类别标签、中心点标签、三维信息标签和欧拉角标签;所述三维属性标签信息包括采用下述方式获取:
5.根据权利要求4所述的方法,其特征在于,所述预设对象检测模型包括采用下述方式获取:
6.根据权利要求1所述的方法,其特征在于,所述根据所述二维属性标签信息、所述三维属性标签信息、所述二维属性检测信息和所述三维属性检测信息对所述预设对象检测模型进行训练,得到所述目标对象检测模型,包括:
7.一种对象检测方法,其特征在于,所述方法包括:
8.一种目标对象检测模型的训练装置,其特征在于,所述装置包括:
9.一种对象检测装置,其特征在于,所述装置包括:
10.一种电子设备,其特征在于,包括:
11.一种计算机可读存储介质,其特征在于,当所述存储介质中的指令由电子设备的处理器执行时,使得所述电子设备能够执行如权利要求1至6中任一项所述的目标对象检测模型的训练方法或权利要求7所述的对象检测方法。
技术总结
本公开关于目标对象检测模型的训练方法及对象检测方法,该方法包括获取第一样本对象的第一样本图像和第一样本图像对应的多维度标签信息,多维度标签信息包括:二维属性标签信息和三维属性标签信息;将第一样本图像输入预设对象检测模型进行多维度对象检测,得到第一样本图像对应的多维度检测信息,多维度检测信息包括二维属性检测信息和三维属性检测信息;根据二维属性标签信息、三维属性标签信息、二维属性检测信息和三维属性检测信息对预设对象检测模型进行训练,得到目标对象检测模型。利用本公开实施例通过目标对象检测模型进行对象检测,得到对象的检测信息,目标对象检测模型的检测精度较高,进而提升了检测结果的准确性。
技术研发人员:张振林,高川,赵起超,袁金伟
受保护的技术使用者:中汽创智科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!