一种电容元器件偏极检测方法、系统、设备及存储介质与流程
本发明涉及工业质检,具体而言,涉及一种电容元器件偏极检测方法、系统、设备及存储介质。
背景技术:
1、工业电路板生产制造复杂且繁琐,制造过程中容易引入各种各样的产品缺陷。电容元器件作为工业电路板上的常见元器件,在各种电器设备的核心电路板上无处不在。因此,电容元器件本身的质量水平直接影响或决定着核心电路板乃至电器设备是否合格,其中,电容器的偏极作为一种常见的元器件生产制造缺陷对电器设备安全造成了巨大隐患,在严重场景下甚至会造成核心电路板与电器设备烧毁,导致恶劣的后果。
2、在电子元器件质检环节中,面临数量巨大的元器件质检任务,目前工业界只能采取人工抽检的方法进行批次化的质量评估,由于人工抽检受个人因素和环境因素影响较大,因此存在效率低、准确率低、漏检的问题,这也代表着给后续设备组装埋下了一定程度的安全隐患。
技术实现思路
1、为了解决现有电容元器件偏极缺陷检测存在效率低、准确率低、漏检的问题,本发明实施例提供一种电容元器件偏极检测方法、系统、设备及存储介质。
2、在第一方面,本发明实施例中提供一种电容元器件偏极检测方法,所述方法包括以下步骤:
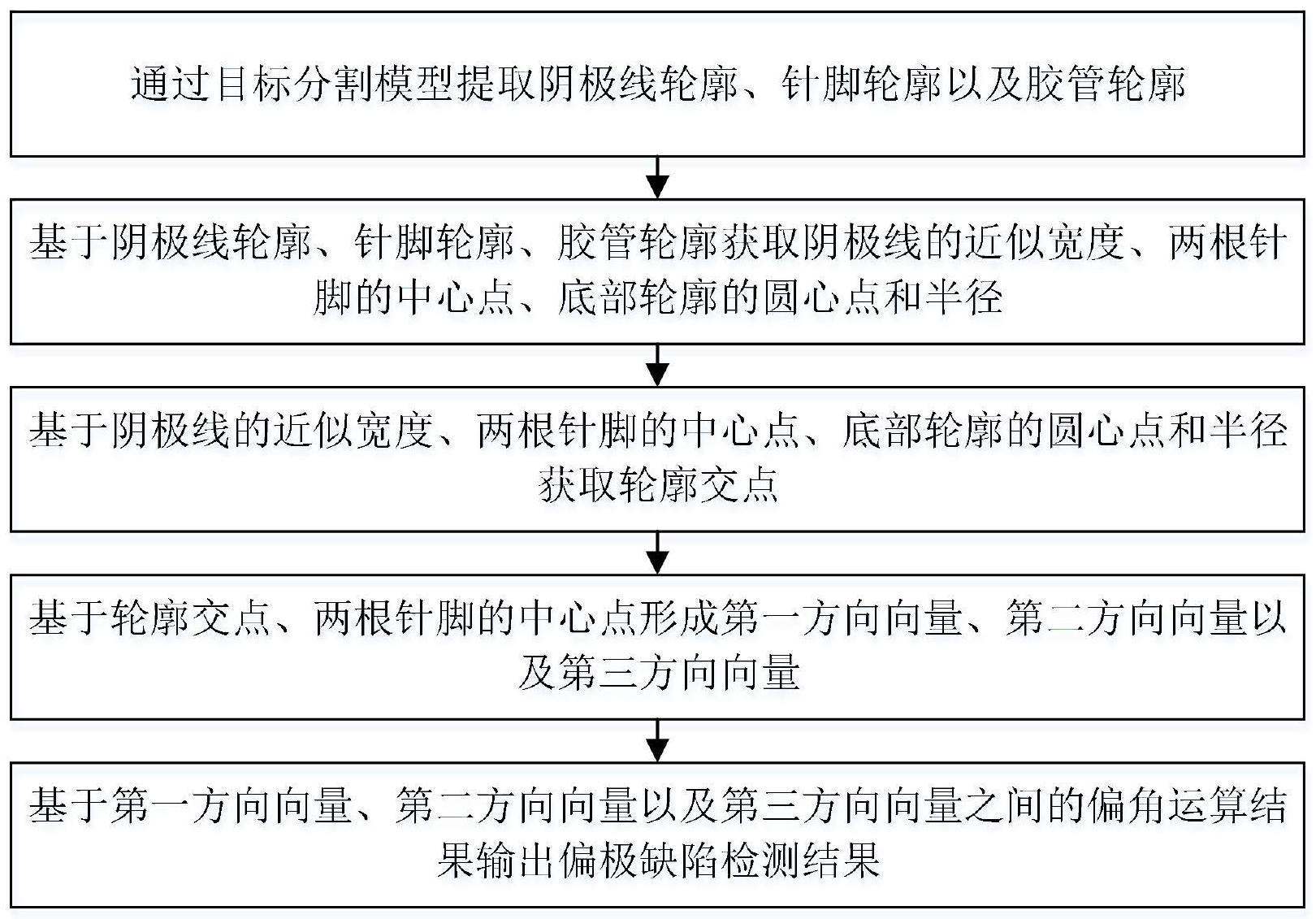
3、将待检测的元器件图像输入目标分割模型,通过所述目标分割模型提取阴极线轮廓、针脚轮廓以及胶管轮廓,其中,所述元器件图像为电容元器件的底部图像;
4、基于阴极线轮廓、针脚轮廓以及胶管轮廓获取阴极线的近似宽度dyjx、两根针脚的中心点zj1、zj2、电容元器件底部轮廓的圆心点pjg和半径rjg;
5、基于电容元器件底部轮廓的圆心点pjg和半径rjg、阴极线的近似宽度dyjx获取两个辅助圆,并且基于两个辅助圆、阴极线轮廓获取轮廓交点yjx1、yjx2、yjx3、yjx4;
6、基于轮廓交点yjx1、yjx2、yjx3、yjx4形成阴极线轮廓两侧的第一方向向量l1和第二方向向量l2,并且基于两根针脚的中心点zj1、zj2形成第三方向向量l3;
7、基于第一方向向量l1、第二方向向量l2以及第三方向向量l3之间的夹角进行偏转角运算,并且基于偏转角运算结果输出偏极缺陷检测结果。
8、于上述实施例中,使用深度学习技术和工程处理技术,根据电容元器件图像来进行偏极缺陷检测方式,相较于基于传统人工抽检的方式,本发明能够实现无漏检,并且有着检测速度与检测精度的双重优势,检测速度为50ms左右,能够面对大规模的检测任务。
9、作为本技术一些可选实施方式,所述目标分割模型基于深度学习网络模型训练得到。
10、作为本技术一些可选实施方式,所述目标分割模型的训练流程如下:
11、采集历史的元器件图像,并且对历史的元器件图像的阴极线、针脚以及胶管进行轮廓标注,以形成分割训练集;
12、对分割训练集中历史的元器件图像进行图像增强处理,并且输入深度学习网络模型进行图像特征提取和迭代训练,以形成目标分割模型。
13、作为本技术一些可选实施方式,通过所述目标分割模型提取阴极线轮廓、针脚轮廓以及胶管轮廓的流程如下:
14、将待检测的元器件图像输入目标分割模型,以获得阴极线轮廓、针脚轮廓以及胶管轮廓的坐标信息;
15、根据阴极线轮廓、针脚轮廓以及胶管轮廓的坐标信息对待检测的元器件图像进行图像分割,以获得阴极线轮廓、针脚轮廓以及胶管轮廓。
16、于上述实施例中,首先对目标分割模型进行训练,然后基于训练之后的目标分割模型进行轮廓提取,实现电容元器件阴极线轮廓、针脚轮廓以及胶管轮廓的输出。
17、作为本技术一些可选实施方式,基于阴极线轮廓、针脚轮廓以及胶管轮廓获取阴极线的近似宽度dyjx、两根针脚的中心点zj1、zj2、电容元器件底部轮廓的圆心点pjg和半径rjg的流程如下:
18、基于阴极线轮廓的坐标信息获取阴极线轮廓的最小外接矩形yjx,并且以阴极线轮廓的最小外接矩形yjx的宽度作为阴极线的近似宽度dyjx;
19、基于针脚轮廓的坐标信息获取针脚轮廓的最小外接矩形zj,并且基于针脚轮廓的最小外接矩形zj获取两根针脚的中心点zj1、zj2;
20、基于胶管轮廓的坐标信息获取胶管轮廓的最小外接矩形jg,并且基于胶管轮廓的最小外接矩形jg获取电容元器件底部轮廓的圆心点pjg和半径rjg。
21、作为本技术一些可选实施方式,基于两个辅助圆、阴极线轮廓获取轮廓交点yjx1、yjx2、yjx3、yjx4的流程如下:
22、以电容元器件底部轮廓的圆心点pjg为中心,并且以(rjg-dyjx,rjg)为取值范围设置两个辅助圆;
23、获取两个辅助圆与阴极线轮廓一侧的轮廓交点yjx1、yjx2以及另一侧的轮廓交点yjx3、yjx4。
24、作为本技术一些可选实施方式,所述第一方向向量l1以轮廓交点yjx1、yjx2为定点形成,第二方向向量l2以轮廓交点yjx3、yjx4为定点形成,第三方向向量l3以中心点zj1、zj2为定点形成。
25、作为本技术一些可选实施方式,基于偏转角运算结果输出偏极缺陷检测结果的流程如下:
26、获取第一方向向量l1与第二方向向量l2之间的第一夹角a,第一方向向量l1与第三方向向量l3之间的第二夹角b,第二方向向量l2与第三方向向量l3之间的第三夹角c;
27、判断第一夹角a是否等于第二夹角b和第三夹角c之和,如果等于,则电容元器件不存在偏极缺陷,反之,则电容元器件存在偏极缺陷,并且电容元器件的偏转角度d=(b+c-a)/2。
28、于上述实施例中,通过对阴极线、针脚以及胶管的空间位置关系进行判定,能够快速准确地判定电容元器件是否存在偏极缺陷。
29、在第二方面,本发明提供一种电容元器件偏极检测系统,所述系统包括:
30、轮廓提取单元,所述轮廓提取单元用于将待检测的元器件图像输入目标分割模型,通过所述目标分割模型提取阴极线轮廓、针脚轮廓以及胶管轮廓,其中,所述元器件图像为电容元器件的底部图像;
31、坐标定位单元,所述坐标定位单元基于阴极线轮廓、针脚轮廓以及胶管轮廓获取阴极线的近似宽度dyjx、两根针脚的中心点zj1、zj2、电容元器件底部轮廓的圆心点pjg和半径rjg;
32、交点获取单元,所述交点获取单元基于电容元器件底部轮廓的圆心点pjg和半径rjg、阴极线的近似宽度dyjx获取两个辅助圆,并且基于两个辅助圆、阴极线轮廓获取轮廓交点yjx1、yjx2、yjx3、yjx4;
33、向量获取单元,所述向量获取单元基于轮廓交点yjx1、yjx2、yjx3、yjx4形成阴极线轮廓两侧的第一方向向量l1和第二方向向量l2,并且基于两根针脚的中心点zj1、zj2形成第三方向向量l3;
34、偏极检测单元,所述偏极检测单元基于第一方向向量l1、第二方向向量l2以及第三方向向量l3之间的夹角进行偏转角运算,并且基于偏转角运算结果输出偏极缺陷检测结果。
35、在第三方面,本发明提供一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述一种电容元器件偏极检测方法。
36、在第四方面,本发明提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现所述一种电容元器件偏极检测方法。
37、本发明的有益效果如下:
38、本发明使用深度学习技术和工程处理技术,实现了电容元器件偏极缺陷的准确检测,解决了现有电容元器件偏极缺陷检测存在漏检的问题。
39、本发明通过对阴极线、针脚以及胶管的空间位置关系进行判定,因此能够快速、准确地进行电容元器件偏极缺陷判定。
- 还没有人留言评论。精彩留言会获得点赞!