预见性巡航功能的评估方法、系统和计算机设备与流程
本技术涉及汽车,特别是涉及一种预见性巡航功能的评估方法、系统、计算机设备、存储介质和计算机程序产品。
背景技术:
1、随着汽车技术的发展,车辆的总拥有成本(采购、使用、维护的成本)中,燃油费用占据了总费用的四成以上。预见性巡航可以根据前方道路的路况信息,协调发动机和变速箱,动态控制车辆速度,减少能量损耗,实现节油减排,降低用户的使用成本。
2、目前,在对预见性巡航的功能进行评估时,主要是在实际道路上进行测试,此种测试方法不仅会受到外部环境、车辆的实际情况的影响,而且测试周期长,导致最终的测试效率低。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高预见性巡航功能的评估效率的预见性巡航功能的评估方法、系统、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本技术提供了一种预见性巡航功能的评估方法。所述方法包括:
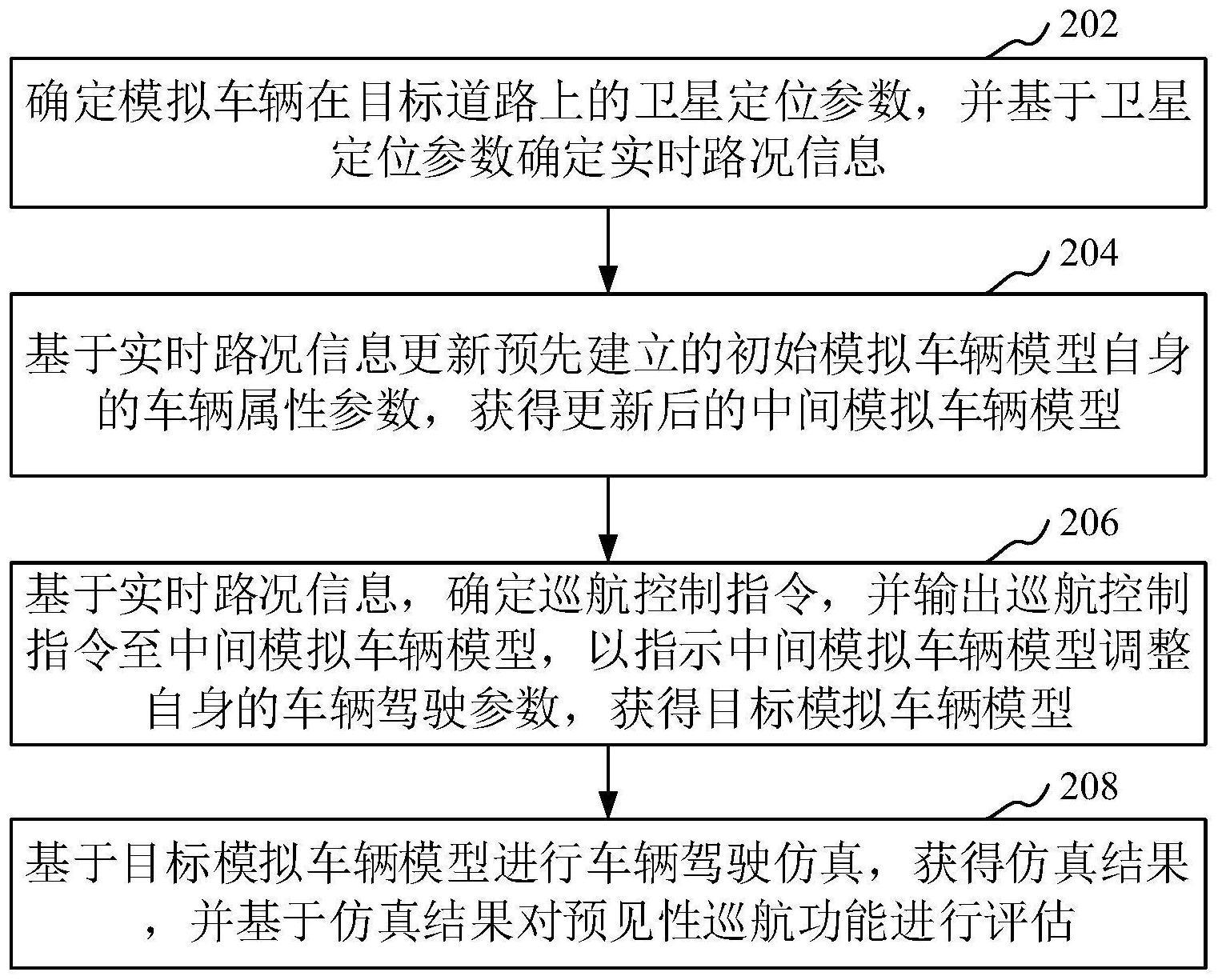
3、确定模拟车辆在目标道路上的卫星定位参数,并基于所述卫星定位参数确定实时路况信息;
4、基于所述实时路况信息更新预先建立的初始模拟车辆模型自身的车辆属性参数,获得更新后的中间模拟车辆模型;
5、基于所述实时路况信息,确定巡航控制指令,并输出所述巡航控制指令至所述中间模拟车辆模型,以指示所述中间模拟车辆模型调整自身的车辆驾驶参数,获得目标模拟车辆模型;
6、基于所述目标模拟车辆模型进行车辆驾驶仿真,获得仿真结果,并基于所述仿真结果对预见性巡航功能进行评估。
7、在其中一个实施例中,所述确定模拟车辆在目标道路上的卫星定位参数,并基于所述卫星定位参数确定实时路况信息,包括:
8、获取预设导航路径;所述预设导航路径是根据所述目标道路的起点信息、途径点信息以及终点信息生成的;
9、基于所述预设导航路径,生成与所述预设导航路径匹配的经纬度坐标集;
10、根据所述经纬度坐标集以及预设初始行驶车速,确定卫星定位参数;
11、获取预设的标准导航地图,并基于所述标准导航地图和所述卫星定位参数进行实时定位,确定实时位置;
12、根据所述实时位置,确定模拟车辆在目标道路上的实时路况信息。
13、在其中一个实施例中,所述实时路况信息包括道路坡度、道路曲率以及道路限速信息;所述将所述实时路况信息输入至预先建立的初始模拟车辆模型中,包括:
14、将所述道路坡度、道路曲率以及道路限速信息输入至预先建立的初始模拟车辆模型中,以使所述初始模拟车辆模型基于所述道路坡度、道路曲率以及道路限速信息,更新自身的车辆重量,获得更新后的中间模拟车辆模型。
15、在其中一个实施例中,所述巡航控制指令包括变速箱控制指令和发动机控制指令;
16、所述基于所述实时路况信息,确定巡航控制指令,并输出所述巡航控制指令至所述中间模拟车辆模型,包括:
17、基于所述实时路况信息,确定目标行驶车速;所述目标行驶车速为使得燃油效率达到燃油效率阈值的车速;
18、基于所述目标行驶车速,确定分别对发动机的转速进行调整的发动机转速调整参数,以及对变速箱的档位进行调整的变速箱档位调整参数;
19、根据所述发动机转速调整参数,确定发动机控制指令,以及根据所述变速箱档位调整参数,确定变速箱控制指令;
20、输出所述变速箱控制指令和发动机控制指令至所述中间模拟车辆模型,以指示所述中间模拟车辆模型基于所述变速箱控制指令更新自身的变速箱档位,以及基于所述发动机控制指令更新自身的发动机转速。
21、在其中一个实施例中,所述仿真结果包括发动机运行数据;所述基于所述目标模拟车辆模型进行车辆驾驶仿真,获得仿真结果,并基于所述仿真结果对预见性巡航功能进行评估,包括:
22、基于所述目标模拟车辆模型进行仿真,确定所述目标模拟车辆模型输出的发动机运行数据;
23、基于所述发动机运行数据,确定所述模拟车辆在目标道路上的油耗数据;
24、根据所述油耗数据,对预见性巡航功能进行评估。
25、在其中一个实施例中,所述方法还包括:
26、确定所述目标模拟车辆模型在进行车辆驾驶仿真过程中的仿真行驶车速;根据所述仿真行驶车速,对预设行驶车速进行更新,获得更新后的预设行驶车速,并返回确定模拟车辆在目标道路上的实时路况信息的步骤并继续执行。
27、第二方面,本技术还提供了一种预见性巡航功能的评估系统。所述系统包括:
28、卫星信号仿真模块、巡航定位模块、巡航控制模块以及模型仿真模块;卫星信号仿真模块、巡航定位模块、巡航控制模块以及模型仿真模块分别通信连接;
29、所述卫星信号仿真模块,用于确定模拟车辆在目标道路上的卫星定位参数,并将所述卫星定位参数转换成卫星信号,发送到所述巡航定位模块;
30、所述巡航定位模块,用于基于所述卫星定位参数确定实时路况信息,将所述实时路况信息输入至所述巡航控制模块;
31、所述巡航控制模块,用于基于所述实时路况信息,确定巡航控制指令,并输出所述巡航控制指令至所述模型仿真模块;所述巡航控制指令,用于指示所述模型仿真模块的中间模拟车辆模型基于所述巡航控制指令调整自身的车辆驾驶参数,获得目标模拟车辆模型;
32、所述模型仿真模块,用于获取所述巡航定位模块中的实时路况信息,并基于所述实时路况信息更新预先建立的初始模拟车辆模型自身的车辆属性参数,获得更新后的中间模拟车辆模型;以及用于基于所述巡航控制指令调整自身的车辆驾驶参数,获得目标模拟车辆模型;基于所述目标模拟车辆模型进行车辆驾驶仿真,获得仿真结果,并基于所述仿真结果对预见性巡航功能进行评估。
33、第三方面,本技术还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述预见性巡航功能的评估方法的步骤。
34、第四方面,本技术还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述预见性巡航功能的评估方法的步骤。
35、第五方面,本技术还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述预见性巡航功能的评估方法的步骤。
36、上述预见性巡航功能的评估方法、系统、计算机设备、存储介质和计算机程序产品,通过确定模拟车辆在目标道路上的卫星定位参数,并基于卫星定位参数确定实时路况信息;基于实时路况信息更新预先建立的初始模拟车辆模型自身的车辆属性参数,获得更新后的中间模拟车辆模型;基于实时路况信息,确定巡航控制指令,并输出巡航控制指令至中间模拟车辆模型,以指示中间模拟车辆模型调整自身的车辆驾驶参数,获得目标模拟车辆模型;基于目标模拟车辆模型进行车辆驾驶仿真,获得仿真结果,并基于仿真结果对预见性巡航功能进行评估。在预见性巡航功能的评估过程中,通过确定模拟车辆在目标道路上的卫星定位参数,并根据卫星定位参数确定模拟车辆在目标道路上的实时路况信息,则可以基于实时路况信息,对预先建立的初始模拟模型进行属性参数更新、驾驶参数的调整,获得目标模拟车辆模型,从而可以基于目标模拟车辆模型进行仿真,获得仿真结果,并基于仿真结果对预见性巡航功能进行评估,从而无需进行实车试验,也可展开评估,提升了预见性巡航功能的评估效率。
- 还没有人留言评论。精彩留言会获得点赞!