基于三维空间成像原理的旷场试验数据获取方法及系统
本发明属于旷场试验,具体是涉及到一种基于三维空间成像原理的旷场试验数据获取方法及系统。
背景技术:
1、通常情况下,可以通过旷场试验对待测试剂的药理作用、药剂疗效等进行分析,以助力药理学的发展。在旷场试验中,首先选择合适的目标生物作为试验生物,通常使用小鼠或大鼠作为试验生物,并在试验开始之前,对动物进行适应性训练,使其熟悉旷场环境。然后准备待测试的药剂,按照实验设计的需要进行配制和浓度调整。对试验生物使用待测药剂,并将试验生物放置于旷场内。
2、在上述现有技术中,主要通过视频录制和观察分析的方法获取旷场试验数据,具体步骤主要是对旷场内的动物行为进行视频录制,然后播放所录制的视频,并通过人工对所播放的视频进行观察分析来计算分析得到动物的行为数据,但采用人工计算分析的数据获取方式需耗费大量的时间成本和人力成本。
技术实现思路
1、本发明提供一种基于三维空间成像原理的旷场试验数据获取方法及系统,以解决采用人工计算分析的数据获取方式需耗费大量的时间成本和人力成本问题。
2、第一方面,本发明提供一种基于三维空间成像原理的旷场试验数据获取方法,该方法包括如下步骤:
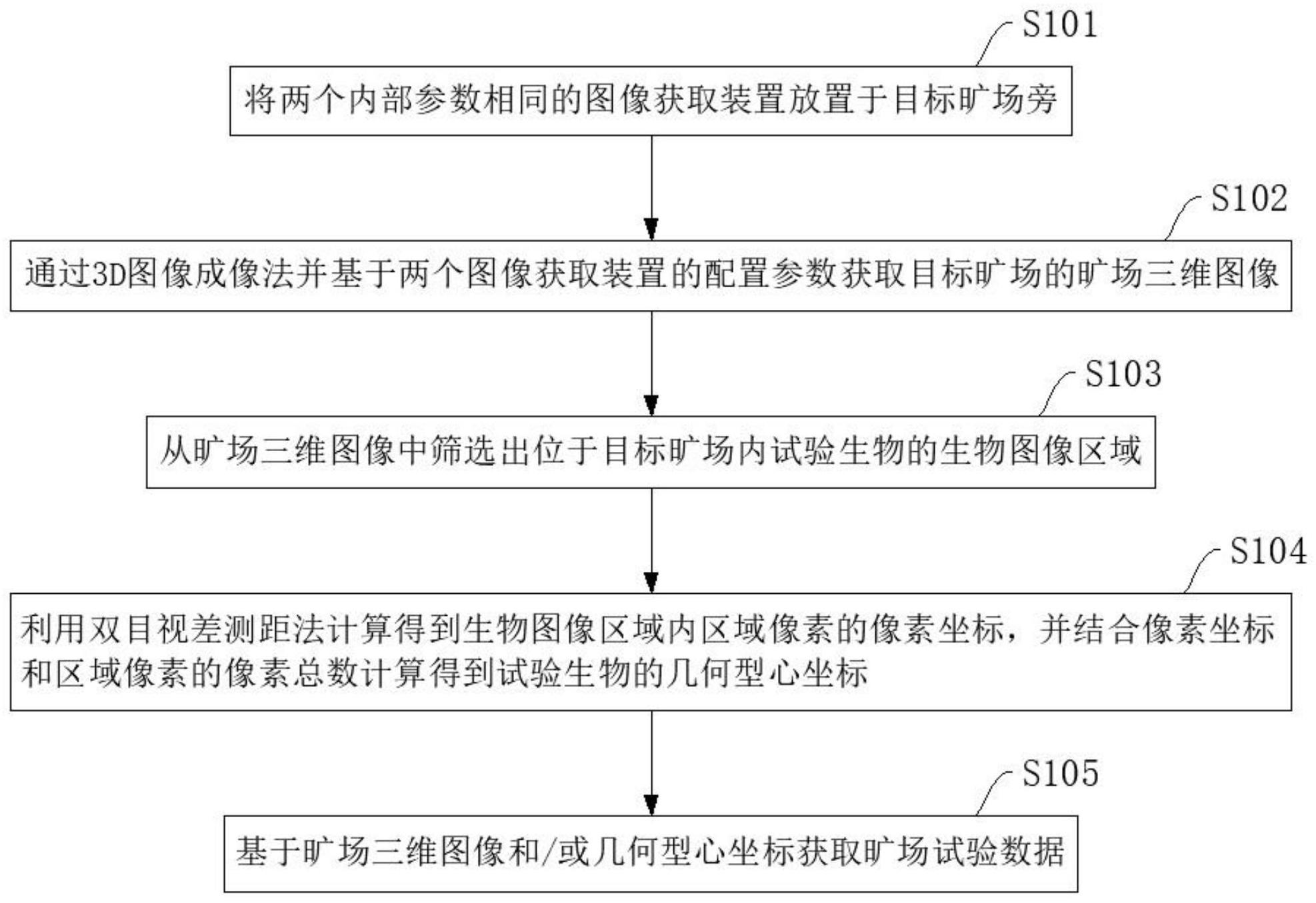
3、将两个内部参数相同的图像获取装置放置于目标旷场旁,两个所述图像获取装置处于同一水平面,且两个所述图像获取装置的光轴平行;
4、通过3d图像成像法并基于两个所述图像获取装置的配置参数获取所述目标旷场的旷场三维图像;
5、从所述旷场三维图像中筛选出位于所述目标旷场内试验生物的生物图像区域;
6、利用双目视差测距法计算得到所述生物图像区域内区域像素的像素坐标,并结合所述像素坐标和所述区域像素的像素总数计算得到所述试验生物的几何型心坐标;
7、基于所述旷场三维图像和/或所述几何型心坐标获取旷场试验数据。
8、可选的,所述配置参数包括装置焦距、装置坐标、装置间距和光心距离,所述通过3d图像成像法并基于两个所述图像获取装置的配置参数获取所述目标旷场的旷场三维图像包括如下步骤:
9、获取两所述图像获取装置所采集到的所述目标旷场的旷场平面图像;
10、结合所述装置焦距、所述装置坐标、所述装置间距和所述旷场平面图像,并根据小孔成像原理构建两所述图像获取装置之间的坐标关系;
11、基于所述坐标关系计算得到所述旷场平面图像中每个像素在所述目标旷场中的旷场三维坐标;
12、结合所有所述矿场三维坐标和所述光心距离生成所述目标旷场的旷场三维图像。
13、可选的,所述旷场平面图像包括第一旷场平面图像和第二旷场平面图像,所述第一旷场平面图像和所述第二旷场平面图像分别为两所述图像获取装置分别采集到的旷场平面图像,所述坐标关系包括第一坐标关系和第二坐标关系,所述结合所述装置焦距、所述装置坐标、所述装置间距和所述旷场平面图像,并根据小孔成像原理构建两所述图像获取装置之间的坐标关系包括如下步骤:
14、结合所述装置焦距、所述装置坐标、所述第一旷场平面图像和所述第二旷场平面图像构建所述第一坐标关系,所述第一坐标关系的表达式为:
15、
16、式中:f表示所述装置焦距,(x1,y1,z1)表示其中一所述图像获取装置的所述装置坐标,(x2,y2,z2)表示另一所述图像获取装置的所述装置坐标,(u1,v1)表示所述第一旷场平面图像中的图像点坐标,(u2,v2)表示所述第二旷场平面图像中的图像点坐标;
17、结合所述装置坐标和所述装置间距构建所述第二坐标关系,所述第二坐标关系的表达式为:
18、
19、式中:b表示所述装置间距。
20、可选的,所述旷场三维坐标的计算公式为:
21、
22、式中:(x,y,z)表示所述目标旷场内任意一点的所述旷场三维坐标。
23、可选的,所述试验生物的几何型心坐标的计算公式为:
24、
25、式中:(u,v,w)表示所述试验生物的所述几何型心坐标,(i,j,k)表示所述生物图像区域内区域像素的像素坐标,n表示所述像素总数,ω表示所述生物图像区域内区域像素的像素集。
26、可选的,所述旷场试验数据包括所述试验生物的平面运动速度,基于所述几何型心坐标获取所述平面运动速度的计算公式如下:
27、
28、
29、
30、式中:vt表示所述试验生物在t时刻的所述平面运动速度,vu表示所述试验生物在水平方向上的速度分量,vv表示所述试验生物在竖直方向上的速度分量。
31、可选的,所述旷场试验数据包括所述试验生物的直立行为数据,所述直立行为数据包括直立次数和直立频率,基于所述几何型心坐标获取所述直立行为数据包括如下步骤:
32、基于所述几何型心坐标并根据预设的时间间隔生成w值曲线;
33、通过峰值检测法识别所述w值曲线中的特征峰,并将所述特征峰的数量作为所述直立次数;
34、将所述直立次数与所述时间间隔的比值作为所述直立频率。
35、可选的,所述旷场试验数据包括所述目标旷场内的粪便数量和粪便体积,基于所述旷场三维图像获取所述粪便数量和所述粪便体积包括如下步骤:
36、基于所述旷场三维图像计算得到所述目标旷场的旷场空间体积;
37、预处理所述旷场三维图像;
38、结合图像识别方法和边缘特征提取方法,提取预处理后的所述旷场三维图像中的粪便图像区域;
39、统计所述粪便图像区域的区域数量,并将所述区域数量作为所述粪便数量;
40、结合所有所述粪便图像区域中粪便图像像素的像素总和与所述旷场三维图像中旷场图像像素的像素总和计算得到粪便像素占比;
41、结合所述粪便像素占比和所述旷场空间体积计算得到所述粪便体积。
42、可选的,所述从所述旷场三维图像中筛选出位于所述目标旷场内试验生物的生物图像区域包括如下步骤:
43、对所述旷场三维图像进行降噪处理,得到降噪旷场图像;
44、将所述降噪旷场图像进行灰度化处理,得到灰度旷场图像;
45、将灰度旷场图像进行二值化处理,得到旷场二值化图像;
46、通过阈值分割方法分割所述旷场二值化图像,以突显所述旷场二值化图像中位于所述目标旷场内试验生物的初始生物图像区域;
47、基于阈值分割后的所述矿场二值化图像并通过差分图像方法提取所述初始生物图像区域;
48、利用形态学操作处理所述初始生物图像区域,得到生物图像区域。
49、第二方面,本发明还提供一种基于三维空间成像原理的旷场试验数据获取系统,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如第一方面中所述的方法。
50、本发明的有益效果是:
51、本发明所采用的基于三维空间成像原理的旷场试验数据获取方法包括如下步骤:将两个内部参数相同的图像获取装置放置于目标旷场旁,两个图像获取装置处于同一水平面,且两个图像获取装置的光轴平行;通过3d图像成像法并基于两个图像获取装置的配置参数获取目标旷场的旷场三维图像;从旷场三维图像中筛选出位于目标旷场内试验生物的生物图像区域;根据生物图像区域内区域像素的像素坐标和像素总数,计算得到试验生物的几何型心坐标;基于旷场三维图像和/或几何型心坐标获取旷场试验数据。根据上述步骤,可以通过图像获取装置实时获取到旷场的三维图像,并通过对三维图像的进一步计算分析获取到旷场试验数据。相较于人工录制图像和人工数据分析,在获取旷场试验数据方面具有更高的效率,且可以节省人力。另一方面还可以排除人工对数据分析的干扰,使得获取到的旷场试验数据也更加准确。
- 还没有人留言评论。精彩留言会获得点赞!