一种基于无线信号的交通道路目标识别方法
本发明属于无线网络中的无线目标识别领域,尤其涉及一种基于无线信号的交通道路目标识别检测方法。
背景技术:
1、随着智能交通系统完成度的不断提高,在交通道路目标检测方面产生了更多的需要。例如运用在智能车辆控制中高级驾驶辅助系统就需要传感器能够反映前向目标信息,以提供安全驾驶,避障等需求。在这种应用环境下,对设备的要求不仅需要测量精确,不受恶劣环境影响,获取目标空间速度信息及时外,还需要易集成,价格低廉,便于工业化生产。
2、市面上常见的视觉传感器依靠因其使用成本低廉,且对目标的识别能力好常用来检测人和车,以及交通标志。虽然采用视觉摄像头进行识别车辆道路目标具有识别精度高且设备易扩展的优势,但是还存在一些缺陷:一是图像信息量大,系统在处理信息中花费时间长;二是容易受到恶劣天气的影响,鲁棒性低。
3、而采用无线传感器识别目标信息可以减少处理信息,提高实时性,且受恶劣天气和光照的影响小,鲁棒性高。但依靠无线传感器采集的信息往往目标特征不明显,识别难度大,准确率不高。因此,目前的主流识别方法是将无线传感器作为视觉传感器的辅助去识别目标信息。
技术实现思路
1、为解决现有技术存在的相关问题,提高无线传感器对目标识别准确率和点云成像效果,本发明提出了一种基于无线信号的交通道路目标识别检测方法,以克服无线传感器单独识别目标难度大的问题。
2、为实现上述的目标,本发明采用的技术方案为:
3、一种基于无线信号的交通道路目标识别方法,包括以下步骤:
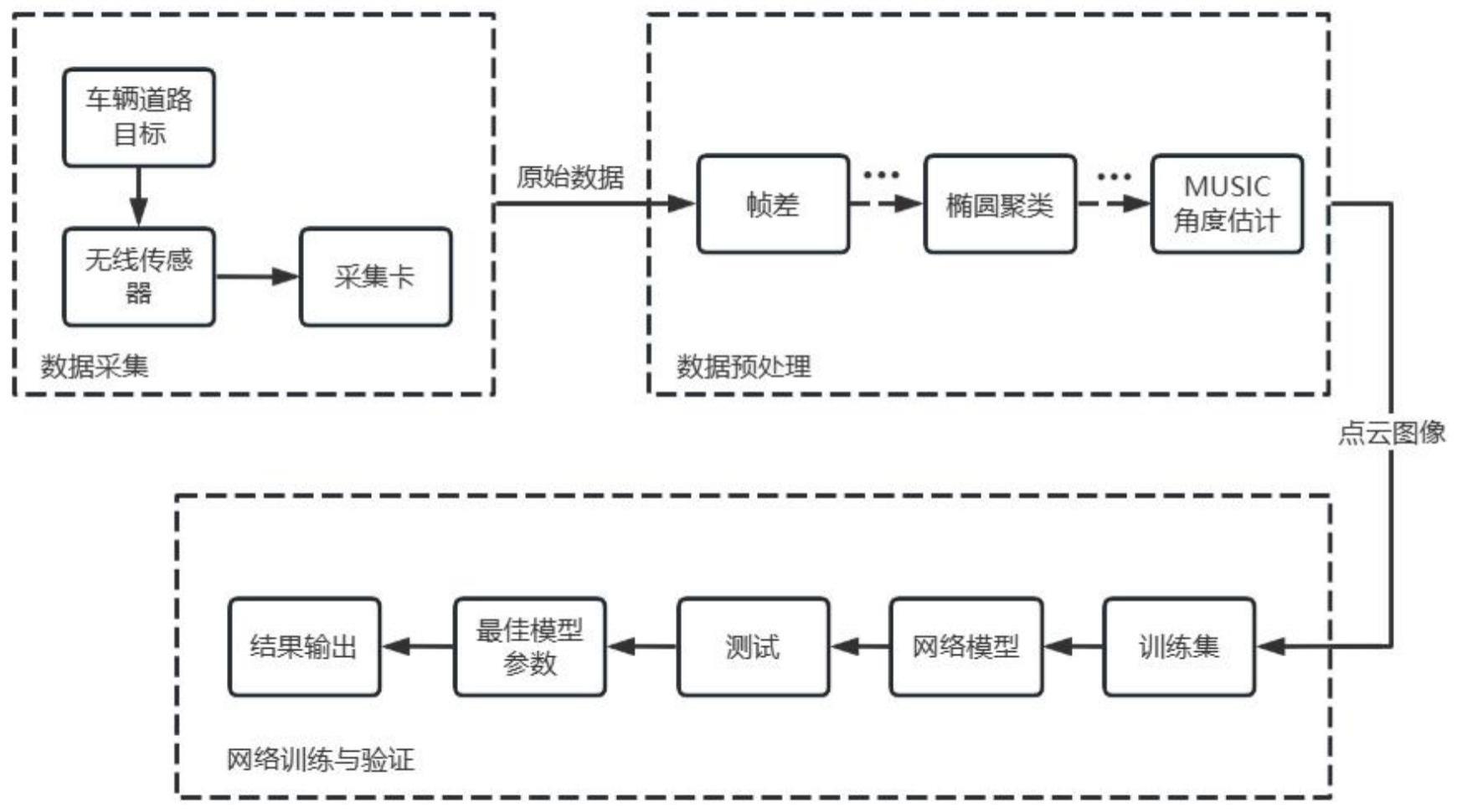
4、步骤1:选取5种不同的交通道路目标类:人、自行车、汽车、卡车和电瓶车,使用无线传感器采集上述目标数据;
5、步骤2:对步骤1采集的目标数据进行预处理:首先使用帧差过滤静止目标与周围环境噪声;然后使用二维傅里叶变换将目标数据转化为距离-速度图;接着使用二维有序统计恒定虚警率检测器对距离-速度图检测目标信号;再使用椭圆距离对检测出的目标进行分类和位置估计;然后使用速度解模糊算法对产生速度模糊的目标进行修正补偿,得到新的距离-速度图;再次使用椭圆聚类更新当前目标类别和位置;最后使用music算法进行角度估计,得到距离-角度图;
6、步骤3:对步骤2中获得的距离-速度图和距离-角度图使用labelimg软件打上标签,建立训练数据集;同时,准备部分未打上标签的图片作为测试数据集;
7、步骤4:获得yolov5卷积神经网络;
8、步骤5:对步骤4中获得的网络结构进行修改,变为双流yolov5网络结构;
9、步骤6:使用步骤3中获得的训练数据集对步骤4中的双流yolov5网络进行训练;
10、步骤7:使用步骤6中训练好的双流yolov5网络对步骤3中获得的测试数据集进行检测识别,获得对不同目标类别识别结构的混淆矩阵;
11、步骤8:对步骤7中的识别结果进行分析,调整检测参数;
12、步骤9:使用步骤8中调整参数后的yolov5网络,识别由无线传感器采集的原始数据生成的距离-速度图和距离角度图,对图中目标完成检测与类别的识别。
13、进一步,所述步骤2中,首先使用的帧差法是采用相邻帧差对静止目标进行过滤,然后依次使用快时间傅里叶变换和慢时间傅里叶变换,即对单个chirp内的数据点和多个chirp进行傅里叶变换,得到距离和速度的两个维度信息形成距离速度图;然后再对距离速度图使用二维有序统计恒定虚警率检测器,在目标单元周围形成滑框,按照设定比例对参考单元能量选取其中的大值作为噪声能量,阈值因子和虚警概率的关系表达式为:
14、
15、式中,k表示选取比例,α表示门限因子,γ(x)代表伽马函数,n指参考单元总数,通过二分法获得阈值因子后,将阈值因子和噪声能量相乘,作为阈值门限与目标单元进行比较。
16、再进一步,所述步骤2中,采用基于doppler相偏补偿的速度扩展算法,利用发生速度模糊时测量相位和实际相位互补的原理,对所有目标进行相位补偿,补偿相位θc公式为:
17、
18、其中,c为光速,vr为目标测量速度,fc为天线发射信号频率,tc为信号周期。补偿后使用角度估计算法估计补偿前后的角度峰值,进行比对,如果补偿后的角度峰值能量大于补偿前的角度峰值能量,则目标发生速度模糊,需要进行速度补偿;反之,则不需要补偿。测量速度和实际速度的关系如下:
19、vr=ve+2*k*vmax,k∈(-1,0,1)
20、其中,vr是目标实际速度,ve是测量速度,vmax是雷达测速范围,k值根据目标实际速度具有不同值进行速度补偿:当目标超过测量最大速度且远离接受天线时,k为1;超速且靠近接收天线时,k为-1;未超速时,k为0。
21、更进一步,所述步骤2中,使用music算法进行角度估计的具体步骤如下:
22、2.1)将接收信号与其转置相乘,获得信号的协方差矩阵;
23、2.2)对协方差矩阵进行特征分解,得到与信号分类相对应的信号子空间和与噪声子空间;
24、2.3)通过噪声子空间与信号子空间相互正交的性质,接着构建出两个子空间的正交空间谱函数;
25、2.4)通过遍历所有角度进行找寻空间谱函数峰值最大的角度,即信号的到达角,完成角度估计。
26、所述步骤5中,对yolov5卷积神经网络的结构修改,将原yolov5网络的backbone层的单分支结构,增加一条分支,并在两条分支中增加cross-modality fusion transformer机制,完成对backbone层输出的三种感受野不同的特征图的融合,cross-modality fusiontransformer的机制将距离速度图和距离角度图的特征图融合为一个相关特征矩阵,在该矩阵的主对角线上进行模态内相关,在副对角线处进行模态间相关,以此使得两张图的特征能紧密融合在一起。
27、所述步骤8中,通过步骤7中的结果混淆矩阵调整网络参数,将置信度阈值调整为0.5,iou阈值调整为0.9,学习率改为0.01,进化参数调整为300,用此参数对目标识别的效果最佳。
28、所述步骤2中,滑框为17*9的长方形,其中滑框内侧44个单元作为保护单元,外侧108个单元作为参考单元,比例设置为0.75,虚警概率设置为10-6。
29、本发明的有益效果是:
30、1.提出了一种基于无线信号的交通道路目标识别检测方法,可提高无线传感器点云成像效果和目标识别准确率,在单传感器下仍具有较高的检测性能。
31、2.本发明实现了仅基于无线信号的目标识别方法,不依靠摄像头进行识别,使整个识别系统不易受恶劣天气和光照的影响,同时避免了采用摄像头带来的隐私侵犯问题。
32、3.本发明使用了多模态的双流yolov5卷积神经网络,与传统的单流yolov5网络相比具有更强的特征融合效果,在准确率,漏检率和虚警率上均有不错的提升效果,使用在其他数据上均可以获得提升。
33、4.本发明提供的无线信号预处理方法除了对交通道路目标识别外,通过修改采集参数,也适用于室内小场景下的目标识别。
34、5.本发明采用了将距离,角度,速度信息分成距离-角度图和距离-速度图的二维图像融合识别模式,与传统的距离-速度-角度三维图像对比,显著降低了处理信息量的大小,且仍然具有较高的识别效果。
- 还没有人留言评论。精彩留言会获得点赞!