相机位姿估计方法、装置、计算机设备及介质与流程
本发明涉及视觉定位,尤其涉及一种相机位姿估计方法、装置、计算机设备及介质。
背景技术:
1、目前,视觉同步定位与建图(simultaneous localization and mapping,slam)技术已广泛应用于如机器人控制、自动驾驶、虚拟现实(virtual reality,vr)、增强现实(augmented reality,ar)等多种任务中,以在未知环境中实时定位机器人自身未知并同时构建环境的三维地图。
2、为了更好的估计机器人的位姿信息,现有方法通常采用视觉里程计进行处理,视觉里程计是一种利用相机获取场景信息并通过场景信息计算相机在连续帧之间的位姿变化的技术。但是对于单目相机而言,并不能得到真实尺度下的运动信息,即使通过深度或者双目相机补全场景的尺度,长期运行的累积误差依然无法避免。而且视觉里程计技术的稳定性很大程度上依赖于场景中的可靠特征点,特别是对于室内非结构化环境和室外复杂环境的移动设备定位,特征点的准确性和密度不能完全保证。这时,一个可靠的增量式定位方法,例如全球定位系统(global positioning system,gps),可以很好地补偿视觉里程计的不足。
3、由于全球定位系统具有较高的全局一致性,利用全球定位系统进行定位,可以有效地去除视觉里程计算法的漂移和误差,提高定位的精度、准确度和稳定性。但是全球定位系统数据本身的精度是无法保证的,一但使用了错误的数据,很有可能导致整段视觉里程计计算失败。因此,如何使用高噪声定位数据辅助提高视觉里程计计算的准确率成为了亟待解决的问题。
技术实现思路
1、有鉴于此,本发明实施例提供了一种相机位姿估计方法、装置、计算机设备及介质,以解决在高噪声定位数据条件下,通过定位数据辅助视觉里程计计算的准确率较低的问题。
2、第一方面,本发明实施例提供一种相机位姿估计方法,所述相机位姿估计方法包括:
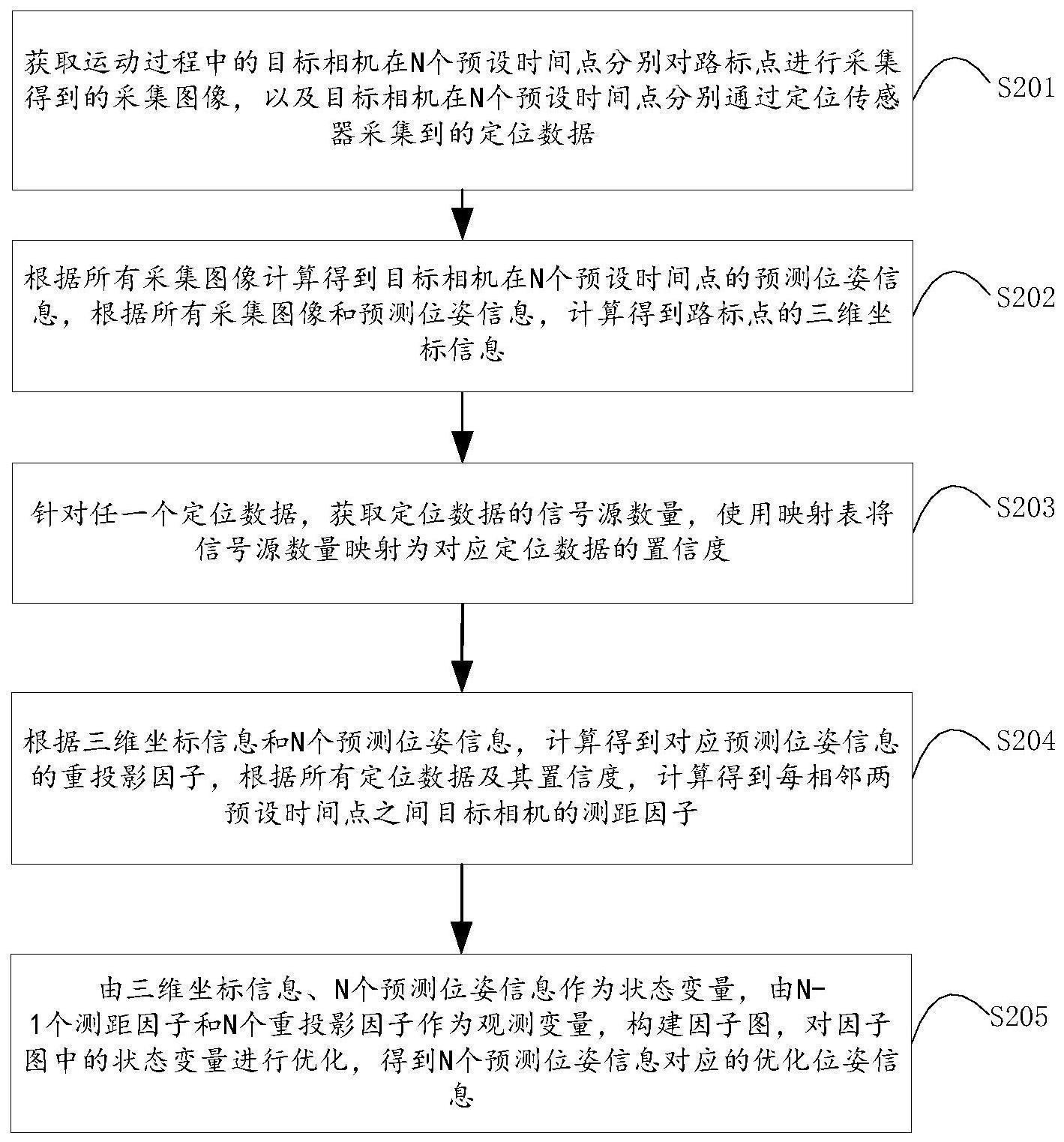
3、获取运动过程中的目标相机在n个预设时间点分别对路标点进行采集得到的采集图像,以及所述目标相机在n个预设时间点分别通过定位传感器采集到的定位数据;
4、根据所有采集图像计算得到所述目标相机在n个预设时间点的预测位姿信息,根据所有采集图像和所述预测位姿信息,计算得到所述路标点的三维坐标信息;
5、针对任一个定位数据,获取所述定位数据的信号源数量,使用映射表将所述信号源数量映射为对应所述定位数据的置信度,所述映射表包括所述信号源数量和所述置信度之间的映射关系;
6、根据所述三维坐标信息和n个所述预测位姿信息,计算得到对应预测位姿信息的重投影因子,根据所有定位数据及其置信度,计算得到每相邻两预设时间点之间所述目标相机的测距因子;
7、由所述三维坐标信息、n个所述预测位姿信息作为状态变量,由n-1个所述测距因子和n个重投影因子作为观测变量,构建因子图,对所述因子图中的状态变量进行解算,得到n个所述预测位姿信息对应的估计位姿信息。
8、第二方面,本发明实施例提供一种相机位姿估计装置,所述相机位姿估计装置包括:
9、数据获取模块,用于获取运动过程中的目标相机在n个预设时间点分别对路标点进行采集得到的采集图像,以及所述目标相机在n个预设时间点分别通过定位传感器采集到的定位数据;
10、位姿计算模块,用于根据所有采集图像计算得到所述目标相机在n个预设时间点的预测位姿信息,根据所有采集图像和所述预测位姿信息,计算得到所述路标点的三维坐标信息;
11、置信度映射模块,用于针对任一个定位数据,获取所述定位数据的信号源数量,使用映射表将所述信号源数量映射为对应所述定位数据的置信度,所述映射表包括所述信号源数量和所述置信度之间的映射关系;
12、因子计算模块,用于根据所述三维坐标信息和n个所述预测位姿信息,计算得到对应预测位姿信息的重投影因子,根据所有定位数据及其置信度,计算得到每相邻两预设时间点之间所述目标相机的测距因子;
13、因子图解算模块,用于由所述三维坐标信息、n个所述预测位姿信息作为状态变量,由n-1个所述测距因子和n个重投影因子作为观测变量,构建因子图,对所述因子图中的状态变量进行解算,得到n个所述预测位姿信息对应的估计位姿信息。
14、第三方面,本发明实施例提供一种计算机设备,所述计算机设备包括处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如第一方面所述的相机位姿估计方法。
15、第四方面,本发明实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如第一方面所述的相机位姿估计方法。
16、本发明实施例与现有技术相比存在的有益效果是:
17、获取运动过程中的目标相机在n个预设时间点分别对路标点进行采集得到的采集图像,以及目标相机在n个预设时间点分别通过定位传感器采集到的定位数据,根据所有采集图像计算得到目标相机在n个预设时间点的预测位姿信息,根据所有采集图像和预测位姿信息,计算得到路标点的三维坐标信息,针对任一个定位数据,获取定位数据的信号源数量,使用映射表将信号源数量映射为对应定位数据的置信度,映射表包括信号源数量和置信度之间的映射关系,根据三维坐标信息和n个预测位姿信息,计算得到对应预测位姿信息的重投影因子,根据所有定位数据及其置信度,计算得到每相邻两预设时间点之间目标相机的测距因子,由三维坐标信息、n个预测位姿信息作为状态变量,由n-1个测距因子和n个重投影因子作为观测变量,构建因子图,对因子图中的状态变量进行解算,得到n个预测位姿信息对应的估计位姿信息,通过定位数据确定视觉里程计的尺度信息,通过对相邻预设时间点之间目标相机的位移进行约束以补偿定位误差和减少里程计的漂移,在定位数据包含较高噪声的情况下,对其置信度进行建模,避免错误的定位数据对视觉里程计解算过程产生不利影响,从而提高了视觉里程计对相机位姿估计的准确率。
技术特征:
1.一种相机位姿估计方法,其特征在于,所述相机位姿估计方法包括:
2.根据权利要求1所述的相机位姿估计方法,其特征在于,所述路标点的数量至少为五个;
3.根据权利要求2所述的相机位姿估计方法,其特征在于,所述根据所有采集图像和所述预测位姿信息,计算得到所述路标点的三维坐标信息,包括:
4.根据权利要求1所述的相机位姿估计方法,其特征在于,所述由所述三维坐标信息、n个所述预测位姿信息作为状态变量,由n-1个所述测距因子和n个重投影因子作为观测变量,构建因子图,包括:
5.根据权利要求1所述的相机位姿估计方法,其特征在于,所述由所述三维坐标信息、n个所述预测位姿信息作为状态变量,由n-1个所述测距因子和n个重投影因子作为观测变量,构建因子图,对所述因子图中的状态变量进行解算,得到n个所述预测位姿信息对应的估计位姿信息,包括:
6.根据权利要求5所述的相机位姿估计方法,其特征在于,在所述以所有位置距离之和作为重投影误差之后,还包括:
7.根据权利要求1至6任一项所述的相机位姿估计方法,其特征在于,所述对所述因子图中的状态变量进行解算,得到n个所述预测位姿信息对应的估计位姿信息,包括:
8.一种相机位姿估计装置,其特征在于,所述相机位姿估计装置包括:
9.一种计算机设备,其特征在于,所述计算机设备包括处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如权利要求1至7任一项所述的相机位姿估计方法。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的相机位姿估计方法。
技术总结
本发明涉及视觉定位技术领域,尤其涉及一种相机位姿估计方法、装置、计算机设备及介质,该方法包括根据目标相机在N个时间点对路标点采集到的采集图像,计算得到目标相机在N个时间点的预测位姿信息,根据所有采集图像和预测位姿信息,计算得到路标点的三维坐标信息,针对任一个目标相机在N个时间点采集到的定位数据,将定位数据的信号源数量映射为置信度,根据三维坐标信息、N个预测位姿信息和N个定位数据及其置信度,确定重投影因子和测距因子,构建因子图并解算,得到估计位姿信息,通过定位数据确定视觉里程计的尺度信息,并对高噪声定位数据的置信度进行建模,有效补偿定位误差,提高视觉里程计对相机位姿估计的准确率。
技术研发人员:秦超,黄哲,王孝宇
受保护的技术使用者:深圳云天励飞技术股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!