一种基于光照增强的夜间道路车道线检测方法
本发明属于车辆安全,更具体地,本发明涉及一种基于光照增强的夜间道路车道线检测方法。
背景技术:
1、交通安全问题已成为世界性的大问题,因此汽车的安全性对人类生命财产的影响是不言而喻的。随着高速公路的发展和汽车性能的提高,汽车行驶速度也相应加快,加之汽车数量增加以及交通运输日益繁忙,汽车事故增多所引起的人员伤亡和财产损失,已成为一个不容忽视的社会问题,汽车的行车安全更显得非常重要。而传统的被动安全已经远远不能避免交通的事故发生,因此主动安全的概念慢慢的行成并不断的完善。视觉传感由于具有信息量大、成本低廉的特点,在汽车主动安全领域有着广泛的应用
2、车道线检测技术是指利用图像传感等手段检测出道路车道虚实标线的技术,它是汽车主动安全领域的关键技术之一。在基于视觉的车道保持系统中,准确地检测和识别车道线是车道偏离预警、车道保持等功能的重要前提。因此,车道线检测技术对于准确性的要求较高,车道线检测的准确性能够直接影响车辆的行车安全。
3、现有的车道线检测算法大多是针对白天的检测效果非常好,但是在夜间道路环境下光照不稳定,如低照明条件、不均匀分布的路灯、车辆的远光灯以及恶劣的天气条件,这些因素会导致车道线变得模糊、暗淡甚至完全不可见,使得车道线检测性能严重下降。
技术实现思路
1、本发明提供一种基于光照增强的夜间道路车道线检测方法,旨在提高夜间车道线检测的准确率。
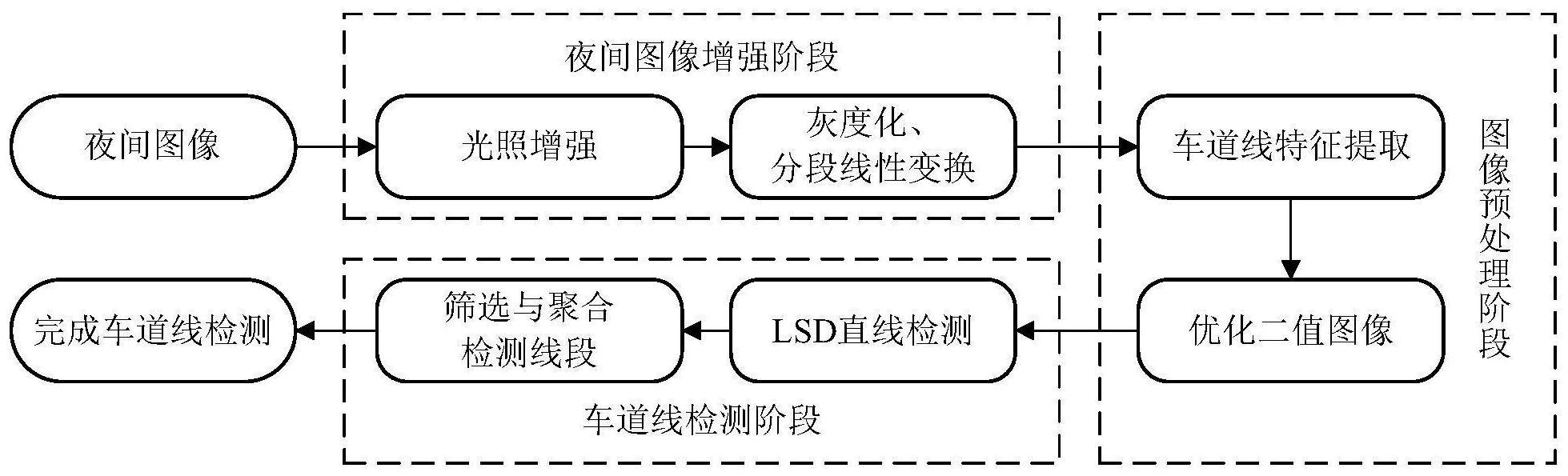
2、本发明是这样实现的,一种基于光照增强的夜间道路车道线检测方法,所述方法具体包括如下步骤:
3、s1、在行车相机拍摄的夜间道路图像中提取车道线感兴趣区域;
4、s2、对车道线感兴趣区域依次进行亮度及对比度的增强,形成增强图像;
5、s3、对增强图像进行二值化,利用车道线的宽度及角度特征对二值图像进行去噪;
6、s4、提取车道线骨架获得骨架图像,检测骨架图像中线段,将直角坐标系下车道线的角度特征和线段截距斜率比值作为约束条件,去除干扰线段后形成左侧、右侧的车道线段集;
7、s5、对左侧、右侧的车道线段集分别采用动态加权算法,提取左侧及右侧车道线。
8、进一步的,将夜间道路图像底部的3/5区域作为车道线感兴趣区域。
9、进一步的,亮度增强方法具体如下:
10、对车道线感兴趣区域x使用对数缩放函数进行处理得到图像i1,使用指数函数对输入车道线感兴趣区域x进行处理得到图像i2;基于改进的lip模型将图像i1及图像i2进行融合得到图像i3;通过改进cdf-hsd函数提高图像i3的整体亮度,得到图像i4;使用归一化函数对图像i4的像素值进行线性缩放得到图像i5;
11、其中,改进的lip模型为:
12、
13、改进cdf-hsd函数为:
14、i4=erf(λ×arctan(exp(i3))-0.5×i3)。
15、进一步的,对亮度增强后的图像进行灰度化,获取灰度图像,采用分段线性变换对灰度图像进行对比度增强。
16、进一步的,增强图像的二值化过程具体如下:
17、将增强图像分为左右等面积的两块区域,获取左、右两块区域的左、右分割阈值ti_l、ti_r,使用左分割阈值ti_l对左侧区域图像进行二值化,使用右分割阈值ti_r对左侧区域图像进行二值化,得到二值图像。
18、进一步的,左分割阈值ti_l或右分割阈值ti_r的获取方法具体如下:
19、将左侧区域图像或右侧区域图像划分成多个指定大小的单元u1,u2…un,计算得出每一个单元的分割阈值t1,t2…tn;左侧区域图像或右侧区域图像的所有分割阈值t1,t2…tn中的最大分割阈值即为左分割阈值ti_l或右分割阈值ti_r。
20、进一步的,基于车道线宽度二值图像的去噪方法具体如下:
21、对二值图像bw1进行线性腐蚀操作和去除少于p个像素的区域得到新的二值图像bw2;
22、对二值图像bw2进行孔洞填充得到二值图像bw3;
23、将二值图像bw3中连通区域进行编号并记录连通区域数量,依次扫描所有连通区域,统计连通区域中每一行中连续像素的数量,将行中连续像素数量超过阈值数量tw的连续像素记录为噪声像素坐标;
24、在二值图像bw3删除记录为噪声像素的坐标,得到消除正常车道线宽度外噪声的二值图像bw4。
25、进一步的,基于车道线角度的二值图像去噪方法具体如下:
26、对二值图像bw4中连通区域再次进行编号并记录区域数量,并获取所有连通区域的倾斜角度;
27、扫描二值图像bw4的所有连通区域,检测连通区域的倾斜角度是否位于所在侧的角度阈值范围,若不位于,则记录当前区域的编号;
28、删除记录的连通区域编号对应连通区域内的所有像素坐标,得到二值图像bw5;
29、其中,左侧车道线角度阈值范围设定为:tal=[20°,80°]和右侧车道线角度阈值范围设定为:tar=[100°,160°]。
30、进一步的,左侧及右侧车道线的提取方法具体如下:
31、先将左侧与右侧两个车道线段集按行排序处理,保留每个线段集的截距数据;
32、将左侧与右侧两个车道线段集中的截距数据进行指数运算再平方运算后,进行归一化处理的到左侧归一化矩阵及右侧归一化矩阵;
33、将右侧归一化矩阵数据上下翻转,将翻转后的右侧归一化矩阵与右侧线段集进行点乘并求和,即可得出右侧线段集聚合成的右侧车道线,将左侧归一化矩阵与左侧线段集进行点乘并求和,得到右侧线段集聚合成的左侧车道线。
34、本发明提出的夜间车道线检测方法具有如下优点:
35、①本发明采用光照增强和分段线性变换提升夜间车道线图像的亮度和对比度,克服了夜间道路图像模糊、暗淡甚至完全不可见,改善了的车道线检测性能严重下降的问题;
36、②本发明采用otsu阈值分割算法获取车道线二值图像并利用道路图像中车道线的宽度和角度特征消除噪声区域,去除二值图像中的干扰信息,从而保留车道线信息,可以有效提高车道线的检测率。
37、③本发明利用lsd(直线检测算法检测图像中可能存在的车道线线段并结合直角坐标系中车道线的特征信息,利用角度和斜率与截距比值的变化规律设置阈值范围,过滤掉干扰线段从而保留有效的车道线段,可以有效提高车道线的检测率。
技术特征:
1.一种基于光照增强的夜间道路车道线检测方法,其特征在于,所述方法具体包括如下步骤:
2.如权利要求1所述基于光照增强的夜间道路车道线检测方法,其特征在于,将夜间道路图像底部的3/5区域作为车道线的感兴趣区域。
3.如权利要求1所述基于光照增强的夜间道路车道线检测方法,其特征在于,亮度增强方法具体如下:
4.如权利要求1或3所述基于光照增强的夜间道路车道线检测方法,其特征在于,对亮度增强后的图像进行灰度化,获取灰度图像,采用分段线性变换对灰度图像进行对比度增强。
5.如权利要求1所述基于光照增强的夜间道路车道线检测方法,其特征在于,增强图像的二值化过程具体如下:
6.如权利要求5所述基于光照增强的夜间道路车道线检测方法,其特征在于,左分割阈值ti_l或右分割阈值ti_r的获取方法具体如下:
7.如权利要求1所述基于光照增强的夜间道路车道线检测方法,其特征在于,基于车道线宽度二值图像的去噪方法具体如下:
8.如权利要求7所述基于光照增强的夜间道路车道线检测方法,其特征在于,基于车道线角度的二值图像去噪方法具体如下:
9.如权利要求1所述基于光照增强的夜间道路车道线检测方法,其特征在于,左侧及右侧车道线的提取方法具体如下:
技术总结
本发明公开一种基于光照增强的夜间道路车道线检测方法,包括如下步骤:在行车相机拍摄的夜间道路图像中提取车道线感兴趣区域;对车道线感兴趣区域依次进行亮度及对比度的增强,形成增强图像;对增强图像进行二值化,利用车道线的宽度及角度特征对二值化图像进行去噪;提取车道线骨架获得骨架图像,检测骨架图像中线段,将直角坐标系下车道线的角度特征和线段截距斜率比值作为约束条件,去除干扰线段后形成左右侧的车道线段集;对左右侧的车道线段集分别采用动态加权算法,提取左右侧车道线。结合先进的图像增强算法和传统检测算法,增强道路图像亮度和对比度,从而有效地增强夜间图像中的车道线,提高车道线检测准确率。
技术研发人员:刘贵如,胡昊东,王陆林,刘进,王征,李铮,陈为松,李胜杰
受保护的技术使用者:安徽工程大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!