一种3D模型展馆自动寻址方法和系统与流程
本发明涉及计算机图形处理和人工智能技术,特别涉及一种3d模型展馆自动寻址方法和系统。
背景技术:
1、目前现有的3d模型展馆技术主要存在如下技术功能:1、主角任务模式下的自动寻址:即根据参观者的目标或者导航提示,自动规划出从当前位置到目标位置的最佳路径,并在俯视地图上显示出来,引导参观者前往目标位置;2、npc虚拟人物的自主运动:即根据一定的规则或者策略,让一些虚拟人物(如其他参观者、工作人员等)在3d展馆中自由移动,增加3d展馆的真实感和活力。然而上述现有技术方案存在如下技术缺陷:1、需要在场景模型之外,附加配置障碍物标记信息和静态的平面(俯视)地图资源,这些工作需要投入大量生产力,效率低下;2、需要对构建的场景进行额外的复杂处理,其中复杂处理方法包括网格化、裁剪、三角化等,然而上述复杂处理方法需要大量的运算资源,因此响应速度慢,成本较高。3、现有的3d场景模型需要人工参与的半自动设计,因此人工成本较高,不利于自动化控制。
技术实现思路
1、本发明其中一个发明目的在于提供一种3d模型展馆自动寻址方法和系统,所述方法和系统利用八叉树结构数据进行俯视化切面投影得到包括但不仅限于墙面等障碍物的俯视结构,并利用高效的寻址算法实现高效自动化的路径寻址,无需人工标记障碍物信息,节省人力成本。
2、本发明另一个发明目的在于提供一种3d模型展馆自动寻址方法和系统,所述方法和系统将3d模型展馆的八叉树结构数据沿着y轴方向法向量进行切割,遍历得到横截面上的三角形集合,过滤得到三角形法向量和x-z面垂直的三角形,将上述过滤后三角形沿着y轴方向投影到x-z面得到线段集为所述3d模型展馆的障碍物和墙面俯视信息,上述方法考虑了不同障碍物或墙面y轴方向上的几何形态问题,因此后续路径规划将不会导致y轴方向上不同高度几何路径不统一产生的碰撞问题。
3、本发明另一个发明目的在于提供一种3d模型展馆自动寻址方法和系统,所述方法和系统将上述俯视化切面投影处理得到的线段集进行网格化处理,利用简单网格化处理方式可以更高效、低成本且自动化的寻址操作。
4、为了实现一个上述发明目的,本发明进一步提供一种3d模型展馆自动寻址方法,所述方法包括:
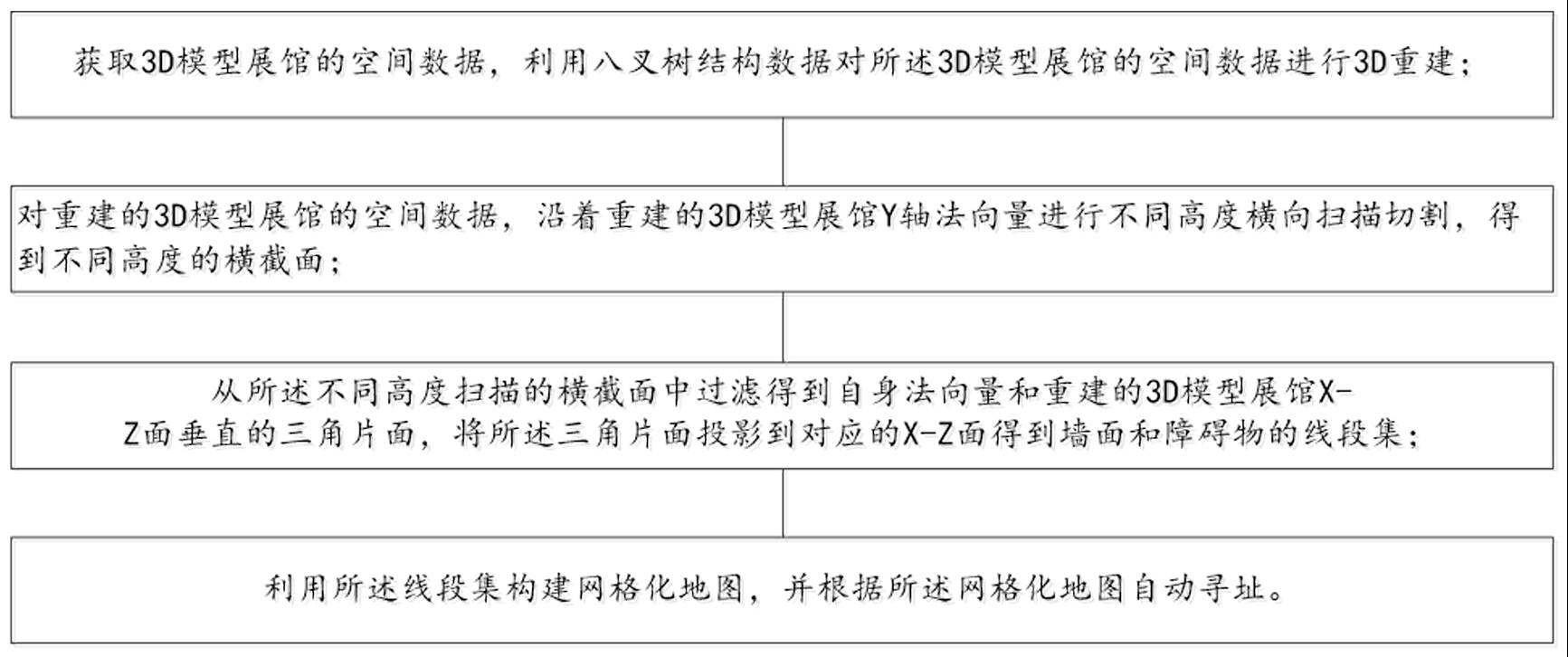
5、获取3d模型展馆的空间数据,利用八叉树结构数据对所述3d模型展馆的空间数据进行3d重建;
6、对重建的3d模型展馆的空间数据,沿着重建的3d模型展馆y轴法向量进行不同高度横向扫描切割,得到不同高度的横截面;
7、从所述不同高度扫描的横截面中过滤得到自身法向量和重建的3d模型展馆x-z面垂直的三角片面,将所述三角片面投影到对应的x-z面得到墙面和障碍物的线段集;
8、利用所述线段集构建网格化地图,并根据所述网格化地图自动寻址。
9、根据本发明其中一个较佳实施例,所述三角片面的获取方法包括:根据八叉树重建的3d模型展馆的空间数据和扫描切割得到的横截面查找边界体元,从所述边界体元中抽取出三角片面。
10、根据本发明另一个较佳实施例,所述三角片面的抽取方法包括:在所述边界体元中查找和所述边界体元相交的等值面,所述边界体元为六面体结构,采用线性差值法计算所述等值面和所述边界体元棱边的交点,将所述交点利用拓扑关系连接形成所述三角片面。
11、根据本发明另一个较佳实施例,所述线段集处理方法包括:将投影在对应x-z面的所述线段集进行网格化处理,其中所述网格化处理方法包括:获取投影在对应x-z面的每一线段的两个端点和中点,并将所述两个端点和中点作为等距阵点,预设固定大小的网格,网格包括多个网格节点,在两个端点和中点之间采用包括线性插值算法或四舍五入法将每个等距阵点都落在所述网格节点上。
12、根据本发明另一个较佳实施例,配置网格点像素,其中将包含投影线段集端点和中点的网格点像素至配置为黑色,其它位置的网格点像素配置为白色,构建包含障碍物和墙面的网格化俯视地图。
13、根据本发明另一个较佳实施例,所述自动寻址方法包括:获取目标起点位置网格点,计算目标起点位置网格点相对每个网格点相对目标起点位置网格点的难度值s(n),其中n表示当网格节点,并计算当前网格节点n和目标终点位置网格点之间的难度值v(n),计算当前网格节点的总难度值p(n)=s(n)+v(n),进一步计算从目标起点网格点位置到目标终点网格点位置最小总难度值的路径执行寻址操作。
14、根据本发明另一个较佳实施例,所述最小总难度值的路径寻址操作包括:根据当前网格节点n和目标终点位置网格节点之间的难度值v(n),遍历当前网格节点n周围所有邻近网格节点的nx的总难度值p(nx)=s(nx)+v(nx),选取总难度值p(nx)最小的邻近网格节点作为当前网格节点的下一步移动路径。
15、根据本发明另一个较佳实施例,所述难度值的计算方法包括:计算当前网格节点和邻近网格节点的曼哈顿距离m,预先配置的每个网格节点的难度值系数αx,每个网格节点的难度值为mj*αx,j,目标起点位置网格点到目标终点位置网格点的最佳路径为min(),其中x为最终移动步数,j为经过的对应网格节点。
16、为了实现一个上述发明目的,本发明进一步提供一种3d模型展馆自动寻址方系统,所述系统通过计算机程序执行上述一种3d模型展馆自动寻址方法。
17、本发明进一步提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行以实现上述一种3d模型展馆自动寻址方法。
技术特征:
1.一种3d模型展馆自动寻址方法,其特征在于,所述方法包括:
2.根据权利要求1所述的一种3d模型展馆自动寻址方法,其特征在于,所述三角片面的获取方法包括:根据八叉树重建的3d模型展馆的空间数据和扫描切割得到的横截面查找边界体元,从所述边界体元中抽取出三角片面。
3.根据权利要求2所述的一种3d模型展馆自动寻址方法,其特征在于,所述三角片面的抽取方法包括:在所述边界体元中查找和所述边界体元相交的等值面,所述边界体元为六面体结构,采用线性差值法计算所述等值面和所述边界体元棱边的交点,将所述交点利用拓扑关系连接形成所述三角片面。
4.根据权利要求1所述的一种3d模型展馆自动寻址方法,其特征在于,所述线段集处理方法包括:将投影在对应x-z面的所述线段集进行网格化处理,其中所述网格化处理方法包括:获取投影在对应x-z面的每一线段的两个端点和中点,并将所述两个端点和中点作为等距阵点,预设固定大小的网格,网格包括多个网格节点,在两个端点和中点之间采用包括线性插值算法或四舍五入法将每个等距阵点都落在所述网格节点上。
5.根据权利要求4所述的一种3d模型展馆自动寻址方法,其特征在于,配置网格点像素,其中将包含投影线段集端点和中点的网格点像素至配置为黑色,其它位置的网格点像素配置为白色,构建包含障碍物和墙面的网格化俯视地图。
6.根据权利要求1所述的一种3d模型展馆自动寻址方法,其特征在于,所述自动寻址方法包括:获取目标起点位置网格点,计算当前网格点相对目标起点位置网格点的难度值s(n),其中n表示当网格节点,并计算当前网格节点n和目标终点位置网格点之间的难度值v(n),计算当前网格节点的总难度值p(n)=s(n)+v(n),进一步计算从目标起点网格点位置到目标终点网格点位置最小总难度值的路径执行寻址操作。
7.根据权利要求6所述的一种3d模型展馆自动寻址方法,其特征在于,所述最小总难度值的路径寻址操作包括:根据当前网格节点n和目标终点位置网格节点之间的难度值v(n),遍历当前网格节点n周围所有邻近网格节点的nx的总难度值p(nx)=s(nx)+v(nx),选取总难度值p(nx)最小的邻近网格节点作为当前网格节点的下一步移动路径。
8.根据权利要求7所述的一种3d模型展馆自动寻址方法,其特征在于,所述难度值的计算方法包括:计算当前网格节点和邻近网格节点的曼哈顿距离m,预先配置的每个网格节点的难度值系数αx,每个网格节点的难度值为mj*αx,j,目标起点位置网格点到目标终点位置网格点的最佳路径为min(),其中x为最终移动步数,j为经过的对应网格节点。
9.一种3d模型展馆自动寻址方系统,其特征在于,所述系统通过计算机程序执行权利要求1-8中任意一项所述的一种3d模型展馆自动寻址方法。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行以实现权利要求1-8中任意一项所述的一种3d模型展馆自动寻址方法。
技术总结
本发明提供了一种3D模型展馆自动寻址方法和系统,所述方法包括:获取3D模型展馆的空间数据,利用八叉树结构数据对所述3D模型展馆的空间数据进行3D重建;对重建的3D模型展馆的空间数据,沿着重建的3D模型展馆Y轴法向量进行不同高度横向扫描切割,得到不同高度的横截面;从所述不同高度扫描的横截面中过滤得到自身法向量和重建的3D模型展馆X‑Z面垂直的三角片面,将所述三角片面投影到对应的X‑Z面得到墙面和障碍物的线段集;利用所述线段集构建网格化地图,并根据所述网格化地图自动寻址。
技术研发人员:柏壑,陈玮
受保护的技术使用者:杭州杰竞科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!