巷道围岩的应力状态的确定方法、装置和确定系统与流程
本技术涉及围岩应力检测,具体而言,涉及一种巷道围岩的应力状态的确定方法、装置、计算机可读存储介质和应力状态确定系统。
背景技术:
1、当前巷道围岩应力转移规律主要包括应力数值分析与矿压实时观测的研究方法。煤矿巷道围岩在原始地应力、动压环境、复杂地质构造及岩体成分等影响下,常导致围岩松散破碎、变形剧烈等动压现象,巷道围岩控制是制约煤矿安全开采的重要因素。目前对巷道围岩应力监测数据分析缺乏标准体系,导致无法准确获取巷道围岩的真实应力状态,也阻碍了超前预测,维护巷道变形以及煤矿的安全开采。
技术实现思路
1、本技术的主要目的在于提供一种巷道围岩的应力状态的确定方法、装置、计算机可读存储介质和应力状态确定系统,以至少解决现有技术中无法准确获取巷道围岩的真实应力状态的问题。
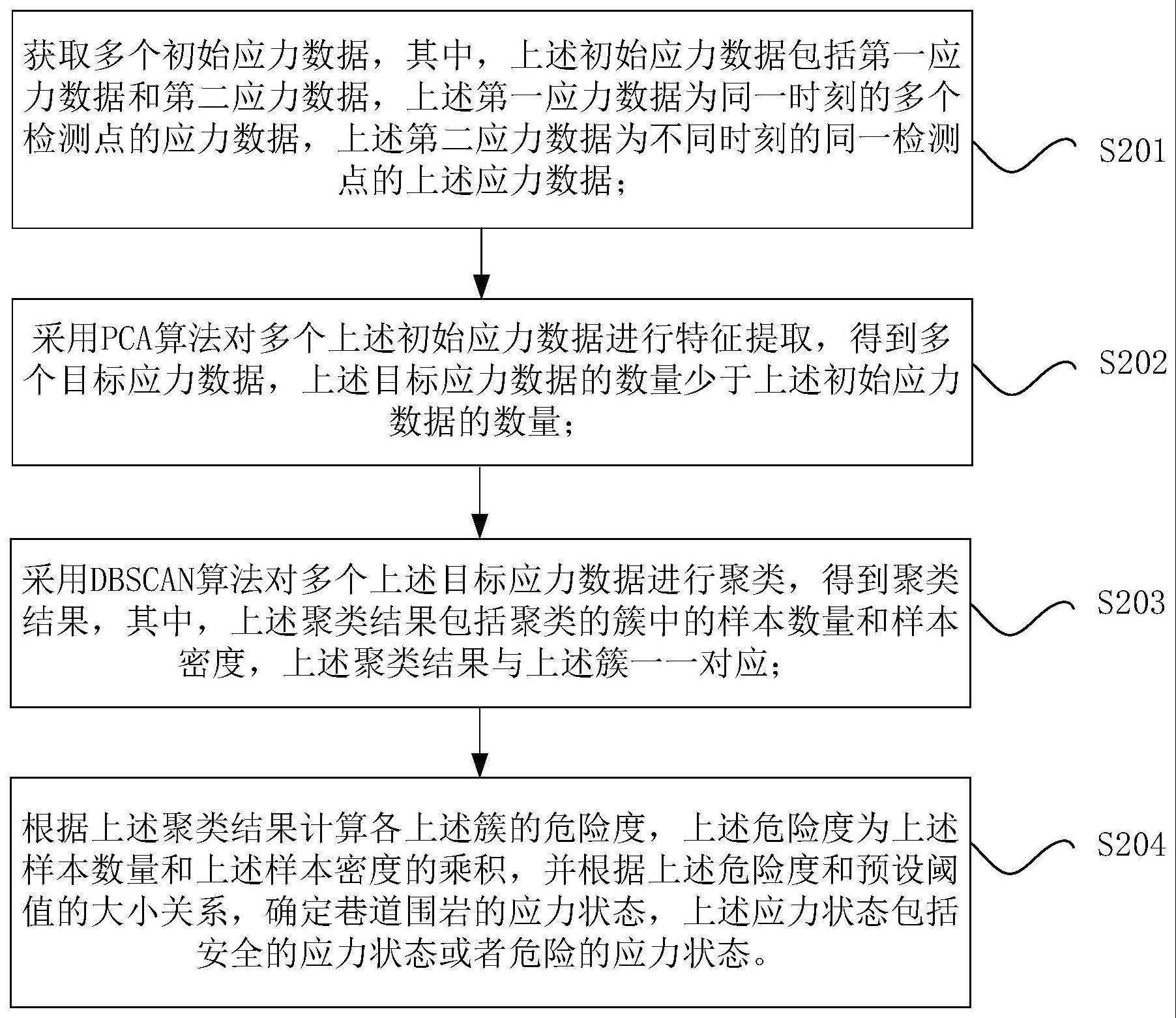
2、为了实现上述目的,根据本技术的一个方面,提供了一种巷道围岩的应力状态的确定方法,包括:获取多个初始应力数据,其中,所述初始应力数据包括第一应力数据和第二应力数据,所述第一应力数据为同一时刻的多个检测点的应力数据,所述第二应力数据为不同时刻的同一检测点的所述应力数据;采用pca算法对多个所述初始应力数据进行特征提取,得到多个目标应力数据,所述目标应力数据的数量少于所述初始应力数据的数量;采用dbscan算法对多个所述目标应力数据进行聚类,得到聚类结果,其中,所述聚类结果包括聚类的簇中的样本数量和样本密度,所述聚类结果与所述簇一一对应;根据所述聚类结果计算各所述簇的危险度,所述危险度为所述样本数量和所述样本密度的乘积,并根据所述危险度和预设阈值的大小关系,确定巷道围岩的应力状态,所述应力状态包括安全的应力状态或者危险的应力状态。
3、可选地,获取第一应力数据,包括:获取应力区域,其中,所述应力区域是巷道中依次连接的多个测线围成的区域,一个所述测线至少包括一个所述检测点,所有的所述测线的长度为预定长度;获取所述应力区域内所有的所述测点的所述应力数据组成的序列,并采用第一公式进行标准化变换,得到更新序列,其中,所述更新序列中包括多个所述第一应力数据,所述第一公式为:
4、
5、其中,yi表示所述更新序列,sli表示t0时刻的第i个所述检测点的所述第一应力数据。
6、可选地,获取第二应力数据,包括:获取第ti时刻的所述检测点的第一初始子应力数据,并通过第二公式对所述第一初始子应力数据进行无量纲化,得到第一子应力数据,其中,所述第二公式为:
7、s2=(aiti-aimin)/(aimax-aimin),
8、其中,aiti表示第ti时刻的所述第一初始子应力数据,aimin表示多个所述第一初始子应力数据中的最小值,aimax表示多个所述第一初始子应力数据中的最大值,s2表示所述第一子应力数据;获取第ti时刻的所述检测点的第二初始子应力数据,并通过第三公式对所述第二初始子应力数据进行无量纲化,得到第二子应力数据,其中,所述第二初始子应力数据为第ti时刻的所述检测点的所述应力数据与初始时刻的所述检测点的所述应力数据的差值,所述第三公式为:
9、s3=(aiti-0)/(aimax-0),
10、其中,所述s3表示所述第二子应力数据;获取第三初始子应力数据,并通过第四公式对所述第三初始子应力数据进行无量纲化,得到第三子应力数据,其中,所述第三初始子应力数据是第ai时刻与ai-1时刻的时间差值,所述第四公式为:
11、s4=(aiti-aimin)/(aimax-aimin),
12、s4表示所述第三子应力数据;获取第四初始子应力数据,并通过第五公式对所述第四初始子应力数据进行无量纲化,得到第四子应力数据,其中,所述第四初始子应力数据是第li时刻所述检测点与采煤工作面的距离与第li+1时刻所述检测点与采煤工作面的距离的差值,所述第五公式为:
13、s5=(liti-limin)/(limax-limin),
14、s5表示所述第四子应力数据。
15、可选地,采用pca算法对多个所述初始应力数据进行特征提取,得到多个目标应力数据,包括:将多个所述初始应力数据按列组成第一矩阵,其中,所述第一矩阵的维度为n行n列;对所述第一矩阵的每一行进行零均值化,计算经过零均值化后的所述第一矩阵的协方差矩阵;提取所述协方差矩阵的特征值和特征向量,其中,所述特征值用于表示所述特征向量的重要程度,所述特征向量用于表示所述初始应力数据在不同方向上的变化模式;按照所述特征值的大小,对所述特征向量按照预定顺序排序,提取前m个所述特征向量,得到特征向量矩阵,其中,所述特征向量矩阵的行数为m;计算所述第一矩阵与所述特征向量矩阵的乘积,得到第二矩阵,其中,所述第二矩阵的维度为n行m列,n大于m,所述第二矩阵中包括多个所述目标应力数据。
16、可选地,采用dbscan算法对多个所述目标应力数据进行聚类,得到聚类结果,包括:获取核心点,其中,所述核心点的领域半径内的样本点的数量大于或者等于最小样本数量;以所述核心点为中心,将与所述核心点的距离小于预定距离的所述样本点归类,得到多个临时聚类簇;提取任意两个所述临时聚类簇,得到第一临时聚类簇和第二临时聚类簇;提取所述第一临时聚类簇中的任意一个所述样本点,在提取到的所述样本点是所述第一临时聚类簇中的所述核心点的情况下,将所述第一临时聚类簇和所述第二临时聚类簇合并,得到聚类簇,直到不存在所述临时聚类簇。
17、可选地,在获取多个初始应力数据之后,所述方法还包括:确定多个所述检测点中是否存在缺失检测点,其中,所述缺失检测点为所述应力数据为空的所述检测点;在存在所述缺失检测点的情况下,根据除所述缺失检测点以外的多个所述检测点对应的多个所述应力数据,采用插值法补充所述缺失检测点缺失的所述应力数据。
18、可选地,根据所述危险度和预设阈值的大小关系,确定巷道围岩的应力状态,包括:在所述危险度小于或者等于第一预设阈值的情况下,确定巷道围岩的所述应力状态为第一应力状态;在所述危险度大于所述第一预设阈值,且所述危险度小于或者等于第二预设阈值的情况下,确定巷道围岩的所述应力状态为第二应力状态,其中,所述第一预设阈值小于所述第二预设阈值,所述第一应力状态的应力危险程度小于所述第二应力状态的危险程度;在所述危险度大于所述第二预设阈值,且所述危险度小于或者等于第三预设阈值的情况下,确定巷道围岩的所述应力状态为第三应力状态,其中,所述第二预设阈值小于所述第三预设阈值,所述第二应力状态的应力危险程度小于所述第三应力状态的危险程度;在所述危险度大于所述第三预设阈值,且所述危险度小于或者等于第四预设阈值的情况下,确定巷道围岩的所述应力状态为第四应力状态,其中,所述第三预设阈值小于所述第四预设阈值,所述第三应力状态的应力危险程度小于所述第四应力状态的危险程度。
19、根据本技术的另一方面,提供了一种巷道围岩的应力状态的确定装置,包括:获取单元,用于获取多个初始应力数据,其中,所述初始应力数据包括第一应力数据和第二应力数据,所述第一应力数据为同一时刻的多个检测点的应力数据,所述第二应力数据为不同时刻的同一检测点的所述应力数据;第一处理单元,用于采用pca算法对多个所述初始应力数据进行特征提取,得到多个目标应力数据,所述目标应力数据的数量少于所述初始应力数据的数量;聚类单元,用于采用dbscan算法对多个所述目标应力数据进行聚类,得到聚类结果,其中,所述聚类结果包括聚类的簇中的样本数量和样本密度,所述聚类结果与所述簇一一对应;第二处理单元,用于根据所述聚类结果计算各所述簇的危险度,所述危险度为所述样本数量和所述样本密度的乘积,并根据所述危险度和预设阈值的大小关系,确定巷道围岩的应力状态,所述应力状态包括安全的应力状态或者危险的应力状态。
20、根据本技术的再一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行任意一种所述巷道围岩的应力状态的确定方法。
21、根据本技术的又一方面,提供了一种应力状态的确定系统,包括:一个或多个处理器,存储器,以及一个或多个程序,其中,所述一个或多个程序被存储在所述存储器中,并且被配置为由所述一个或多个处理器执行,所述一个或多个程序包括用于执行任意一种所述的巷道围岩的应力状态的确定方法。
22、应用本技术的技术方案,采集了两个应力数据,一个是同一时刻的多个检测点的数据,一个是不同时刻的单检测点的时序数据,采用了pca算法,来对得到的应力数据进行降维,去除其中不重要的数据,得到的是较为重要的数据,继而根据这些重要的数据,进行聚类分析,得到了多个聚类的簇,每一个簇中的样本点都是具有相似性的,进而来计算每个簇的危险度,由于考虑了簇的规模(样本数量)和簇的样本密度,进而可以准确地根据这个计算得到的结果来确定应力的状态,即确定应力的危险程度。
- 还没有人留言评论。精彩留言会获得点赞!