一种无人机目标识别方法、系统、计算机及可读存储介质
本发明属于无人机的,具体地涉及一种无人机目标识别方法、系统、计算机及可读存储介质。
背景技术:
1、随着科技的发展,无人机也在快速发展,目前的无人机一般有固定翼无人机、多旋翼无人机以及扑翼机,但固定翼无人机与多旋翼无人机存在噪音大的缺点,扑翼机存在续航短、造价高的缺点,基于上述原因,目前存在一种仿生蝴蝶无人机解决上述问题。
2、仿生蝴蝶无人机的飞行方式较为特殊,其通过模拟蝴蝶的飞行动作即通过仿生蝴蝶无人机的侧翼的扑动结合升力完成飞行,在现有技术中,通常通过可移动的拍摄设备录制包含无人机的目标视频,对目标视频进行单帧分析以识别无人机的位置、轨迹等,但由于仿生蝴蝶无人机在飞行时其侧翼是扑动的,因此在连续的单帧图像中会出现重影的情况,进而影响无人机目标的识别,同时在录制的无人机目标视频中受外界环境干扰容易导致原始的视频中存在多种不同的噪声,采用常规去噪方法效果不好,同时也会影响后续无人机目标的识别过程。
技术实现思路
1、为了解决上述技术问题,本发明提供了一种无人机目标识别方法、系统、计算机及可读存储介质,用于解决现有技术中存在的技术问题。
2、第一方面,该发明提供以下技术方案,一种无人机目标识别方法,所述方法包括:
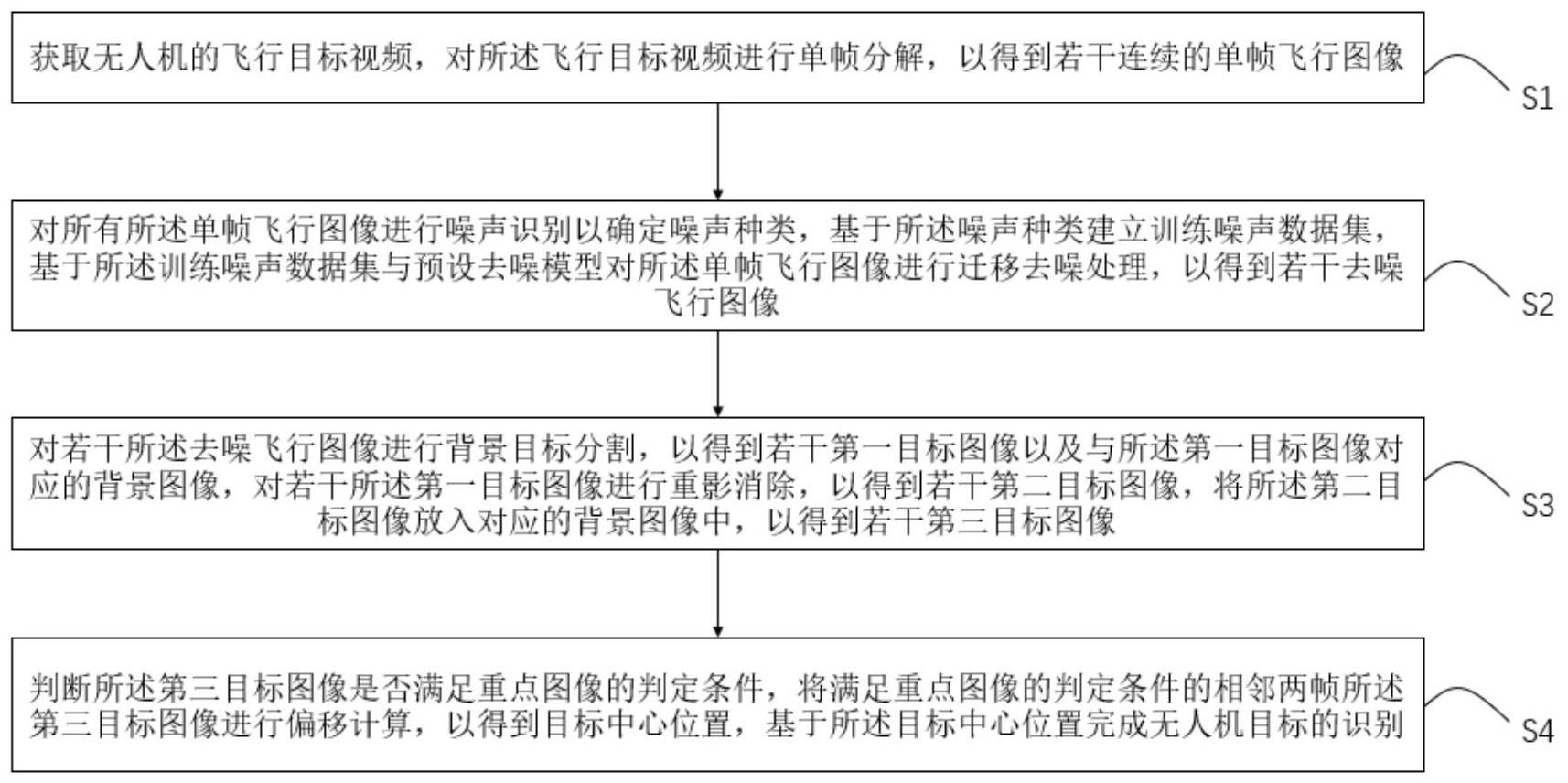
3、获取无人机的飞行目标视频,对所述飞行目标视频进行单帧分解,以得到若干连续的单帧飞行图像;
4、对所有所述单帧飞行图像进行噪声识别以确定噪声种类,基于所述噪声种类建立训练噪声数据集,基于所述训练噪声数据集与预设去噪模型对所述单帧飞行图像进行迁移去噪处理,以得到若干去噪飞行图像;
5、对若干所述去噪飞行图像进行背景目标分割,以得到若干第一目标图像以及与所述第一目标图像对应的背景图像,对若干所述第一目标图像进行重影消除,以得到若干第二目标图像,将所述第二目标图像放入对应的背景图像中,以得到若干第三目标图像;
6、判断所述第三目标图像是否满足重点图像的判定条件,将满足重点图像的判定条件的相邻两帧所述第三目标图像进行偏移计算,以得到目标中心位置,基于所述目标中心位置完成无人机目标的识别;
7、所述基于所述噪声种类对所述单帧飞行图像进行迁移去噪处理,以得到若干去噪飞行图像的步骤包括:
8、基于所述噪声种类将所述单帧飞行图像进行噪声表达:
9、;
10、式中,为不同种类的噪声分量,为对应的噪声权重,为无噪声图像;
11、基于所述噪声种类的优先级将所述单帧飞行图像中的噪声将排序处理,利用注意力编码器将所述单帧飞行图像进行噪声分离,以得到若干分离噪声图像;
12、基于所述噪声种类建立训练噪声数据集,基于所述训练噪声数据集对所述分离噪声图像进行迁移转化以得到转化噪声数据集,基于预设去噪模型与所述训练噪声数据集对所述转化噪声数据集进行去噪处理,以得到若干去噪飞行图像。
13、相比现有技术,本技术的有益效果为:本技术首先获取无人机的飞行目标视频,对所述飞行目标视频进行单帧分解,以得到若干连续的单帧飞行图像;之后对所有所述单帧飞行图像进行噪声识别以确定噪声种类,基于所述噪声种类建立训练噪声数据集,基于所述训练噪声数据集与预设去噪模型对所述单帧飞行图像进行迁移去噪处理,以得到若干去噪飞行图像;然后对若干所述去噪飞行图像进行背景目标分割,以得到若干第一目标图像以及与所述第一目标图像对应的背景图像,对若干所述第一目标图像进行重影消除,以得到若干第二目标图像,将所述第二目标图像放入对应的背景图像中,以得到若干第三目标图像;最后判断所述第三目标图像是否满足重点图像的判定条件,将满足重点图像的判定条件的相邻两帧所述第三目标图像进行偏移计算,以得到目标中心位置,基于所述目标中心位置完成无人机目标的识别,本发明通过对单帧飞行图像进行噪声种类的识别以及迁移去噪,可以去除掉单帧飞行图像中的复合噪声,避免噪声对图像的干扰,同时具有良好的鲁棒性,且本发明通过对第一目标图像进行重影消除,避免单帧飞行图像中的重影影响无人机目标的识别,同时提高了目标识别的准确性。
14、较佳的,所述基于所述噪声种类建立训练噪声数据集,基于所述训练噪声数据集对所述分离噪声图像进行迁移转化以得到转化噪声数据集,基于预设去噪模型与所述训练噪声数据集对所述转化噪声数据集进行去噪处理,以得到若干去噪飞行图像的步骤包括:
15、基于所述噪声种类获取对应的噪声物理模型,获取原始无噪声图像以及真实噪声图像,基于所述噪声物理模型在所述原始无噪声图像中对应添加第一附加噪声,以得到若干单独噪声图像;
16、在所述单独噪声图像中添加若干数量的第二附加噪声,以得到若干复合噪声图像,将若干所述单独噪声图像、若干所述复合噪声图像以及真实噪声图像作为训练噪声数据集;
17、基于所述真实噪声图像并利用对抗网络将所述分离噪声图像的数据向真实域空间进行数据迁移转化,以得到转化噪声数据集;
18、通过所述训练噪声数据集对预设去噪模型进行训练,并通过训练后的预设去噪模型对所述转化噪声数据集进行去噪处理,以得到若干去噪飞行图像。
19、较佳的,所述对若干所述去噪飞行图像进行背景目标分割,以得到若干第一目标图像以及与所述第一目标图像对应的背景图像的步骤包括:
20、计算所述去噪飞行图像中各像素点的像素值,基于所述像素值计算分割因子:
21、;
22、式中,表示处的像素点,表示处的像素点对应样本集中的第个样本值,表示处的像素点对应样本集存在的样本值总数;
23、计算前帧的去噪飞行图像的像素点与样本点的样本最短距离,并基于所述样本最短距离计算调整阈值:
24、;
25、;
26、式中,为调整系数;
27、基于所述调整阈值重新确定预设分割阈值:
28、;
29、基于重新确定后的预设分割阈值对若干去噪飞行图像进行分割,以得到若干第一目标图像以及与所述第一目标图像对应的背景图像。
30、较佳的,所述对若干所述第一目标图像进行重影消除,以得到若干第二目标图像的步骤包括:
31、基于所述第一目标图像设置第一变量与第二变量,并判断所述第一目标图像中的像素点是否属于运动目标;
32、若所述第一目标图像中的像素点属于运动目标则判断所述像素点是否属于所述背景图像的同类像素点,若所述像素点属于所述背景图像的同类像素点,则在所述第二变量中增加预设变量,以得到第三变量;
33、判断所述第三变量是否大于预设变量阈值,若所述第三变量大于预设变量阈值,则将第三变量对应的像素点的所在区域作为待定区域;
34、计算所述待定区域中每个所述像素点对应的所述背景图像的方差,并判断所述方差是否大于预设方差阈值,若所述方差大于所述预设方差阈值,则将所述待定区域从所述第一目标图像中剔除并更新所述背景图像,以得到若干第二目标图像。
35、较佳的,所述判断所述第三目标图像是否满足重点图像的判定条件,将满足重点图像的判定条件的相邻两帧所述第三目标图像进行偏移计算,以得到目标中心位置,基于所述目标中心位置完成无人机目标的识别的步骤包括:
36、将单帧的所述第三目标图像与对应的单帧的模板图像进行差分计算,以得到差分灰度图,基于预设灰度阈值对所述差分灰度图进行灰度分离,基于所述预设灰度阈值计算所述第三目标图像的重要系数:
37、;
38、式中,为第三目标图像中像素点的数量,为第个像素点的灰度值;
39、判断所述重要系数是否小于系数阈值,将所述重要系数小于系数阈值的第三目标图像进行剔除,将所述重要系数不小于系数阈值的第三目标图像进行保留;
40、将保留后的相邻两帧的第三目标图像进行直方图转化与偏移均值计算,以得到目标中心位置,基于所述目标中心位置完成无人机目标的识别。
41、较佳的,所述将保留后的相邻两帧的第三目标图像进行直方图转化与偏移均值计算,以得到目标中心位置,基于所述目标中心位置完成无人机目标的识别的步骤包括:
42、将保留的所述第三目标图像转化为hsv图像,并提取所述hsv图像的通道分量,基于所述通道分量确定保留的所述第三目标图像的直方图;
43、将所述直方图进行反向投影变换并计算对应的像素点密度,基于所述像素点密度对相邻两帧的所述第三目标图像的直方图进行帧差计算,以得到所述直方图中各像素点的偏移分量;
44、计算所有所述偏移分量的偏移均值,基于所述偏移均值确定目标中心位置,并基于所述目标中心位置完成无人机目标的识别。
45、第二方面,该发明提供以下技术方案,一种无人机目标识别系统,所述系统包括:
46、处理模块,用于获取无人机的飞行目标视频,对所述飞行目标视频进行单帧分解,以得到若干连续的单帧飞行图像;
47、去噪模块,用于对所有所述单帧飞行图像进行噪声识别以确定噪声种类,基于所述噪声种类建立训练噪声数据集,基于所述训练噪声数据集与预设去噪模型对所述单帧飞行图像进行迁移去噪处理,以得到若干去噪飞行图像;
48、消除模块,用于对若干所述去噪飞行图像进行背景目标分割,以得到若干第一目标图像以及与所述第一目标图像对应的背景图像,对若干所述第一目标图像进行重影消除,以得到若干第二目标图像,将所述第二目标图像放入对应的背景图像中,以得到若干第三目标图像;
49、识别模块,用于判断所述第三目标图像是否满足重点图像的判定条件,将满足重点图像的判定条件的相邻两帧所述第三目标图像进行偏移计算,以得到目标中心位置,基于所述目标中心位置完成无人机目标的识别;
50、所述去噪模块包括:
51、表达子模块,用于基于所述噪声种类将所述单帧飞行图像进行噪声表达:
52、;
53、式中,为不同种类的噪声分量,为对应的噪声权重,为无噪声图像;
54、排序子模块,用于基于所述噪声种类的优先级将所述单帧飞行图像中的噪声将排序处理,利用注意力编码器将所述单帧飞行图像进行噪声分离,以得到若干分离噪声图像;
55、转化子模块,用于基于所述噪声种类建立训练噪声数据集,基于所述训练噪声数据集对所述分离噪声图像进行迁移转化以得到转化噪声数据集,基于预设去噪模型与所述训练噪声数据集对所述转化噪声数据集进行去噪处理,以得到若干去噪飞行图像。
56、第三方面,该发明提供以下技术方案,一种计算机,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述的无人机目标识别方法。
57、第四方面,该发明提供以下技术方案,一种可读存储介质,所述可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现上述的无人机目标识别方法。
- 还没有人留言评论。精彩留言会获得点赞!