一种用于医院内医疗配送机器人智能调度方法和装置、电子设备与流程
本发明涉及自动驾驶,尤其涉及一种用于医院内医疗配送机器人智能调度方法和装置、电子设备。
背景技术:
1、近年来,自动控制技术和机器人技术的不断改进推动了配送机器人的广泛应用。在智能医院中,医疗配送机器人可以代替工人装卸医疗物资,实现智能医院的自动化物流,极大地提高智能医院的自动化水平。智能医院中的医疗配送机器人调度是指将智能医院内的医疗物资配送任务合理地指派给医疗配送机器人,并在每个医疗配送机器人中确定任务执行顺序。而目前对智能医院内医疗配送机器人的调度方向的研究基本空白。
技术实现思路
1、本发明实施例的目的是提供一种用于医院内医疗配送机器人智能调度方法和装置、电子设备,能够有效解决目前智能医院内医疗配送机器人调度空白的问题。
2、为解决上述技术问题,本发明提供如下技术方案:
3、本发明实施例提供了一种用于医院内医疗配送机器人智能调度方法,其中,该方法包括:
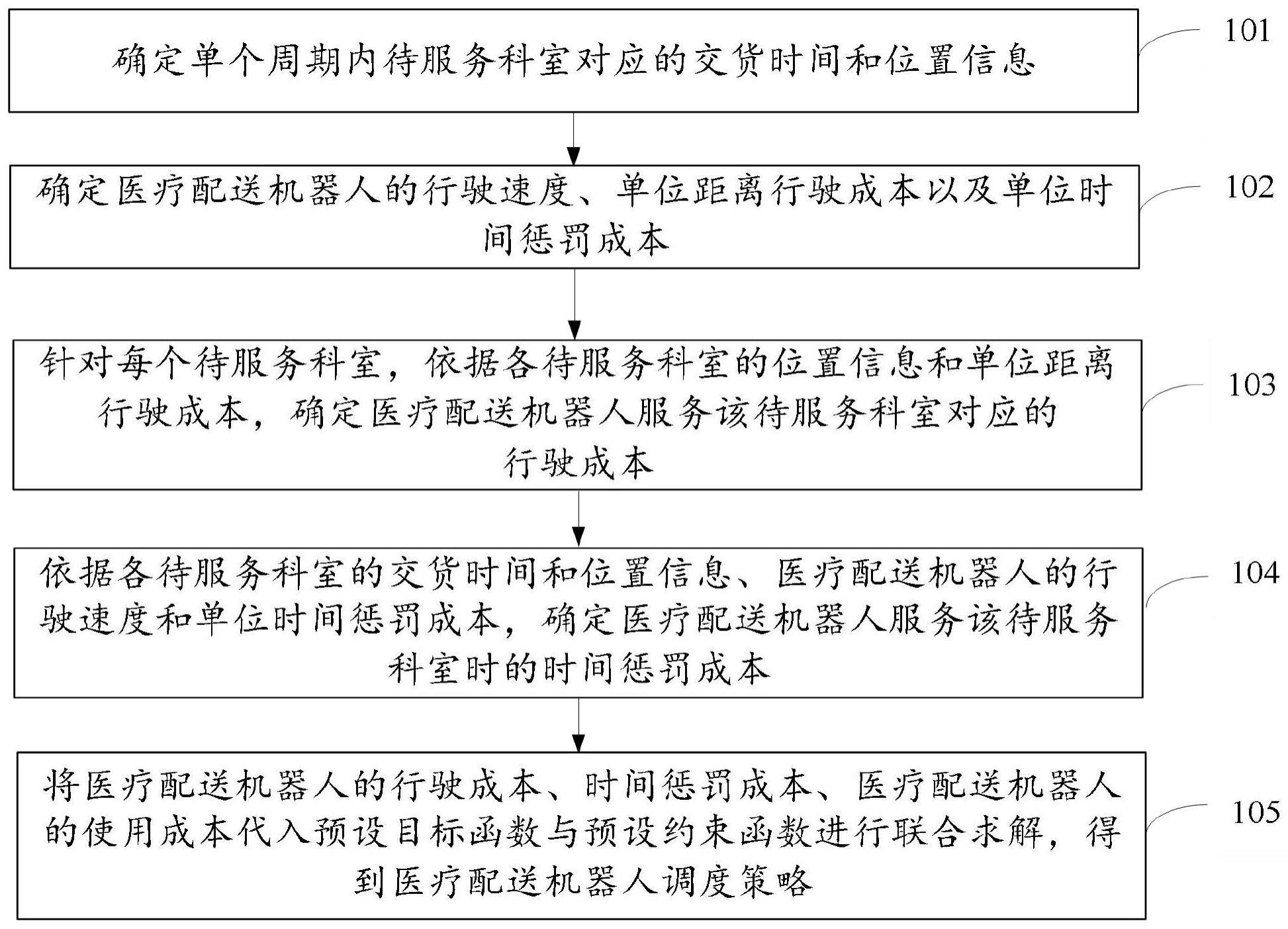
4、确定单个周期内待服务科室对应的交货时间和位置信息;
5、确定医疗配送机器人的行驶速度、单位距离行驶成本以及单位时间惩罚成本;
6、针对每个待服务科室,依据各所述待服务科室的位置信息和所述单位距离行驶成本,确定医疗配送机器人服务所述待服务科室对应的行驶成本;
7、依据各所述待服务科室的交货时间和位置信息、医疗配送机器人的行驶速度和单位时间惩罚成本,确定医疗配送机器人服务所述待服务科室时的时间惩罚成本;
8、将医疗配送机器人的行驶成本、时间惩罚成本、医疗配送机器人的使用成本代入预设目标函数与预设约束函数进行联合求解,得到医疗配送机器人调度策略;
9、其中,所述目标函数用于表征本周期内全部所述待服务科室所消耗的医疗配送机器人的行驶成本、时间惩罚成本以及使用成本之和最小;所述调度策略包括:本周期调度的目标医疗配送机器人集合、每个所述目标医疗配送机器人的配送路径。
10、可选地,针对每个待服务科室,依据各所述待服务科室的位置信息和所述单位距离行驶成本,确定医疗配送机器人服务所述待服务科室对应的行驶成本的步骤,包括:
11、针对每个待服务科室,依据所述待服务科室和当前位置的位置信息确定二者之间的行驶距离;其中,所述当前位置为:其他待服务科室或医疗配送机器人仓库;
12、依据所述行驶距离和单位距离行驶成本,确定从所述当前位置到所述待服务科室的行驶成本。
13、可选地,依据各所述待服务科室的交货时间和位置信息、医疗配送机器人的行驶速度和单位时间惩罚成本,确定医疗配送机器人服务所述待服务科室时的时间惩罚成本的步骤,包括:
14、针对每个待服务科室,依据所述待服务科室的交货时间和位置信息、医疗配送机器人的行驶速度,确定各所述医疗配送机器人达到所述待服务科室的时间;
15、依据所述待服务科室的交货时间、所述医疗配送机器人达到所述待服务科室的时间以及单位时间惩罚成本,确定各所述医疗配送机器人达到所述待服务科室时对应的时间惩罚成本。
16、可选地,针对每个待服务科室,确定各所述医疗配送机器人达到所述待服务科室的时间的步骤,包括:
17、针对每个待服务科室,依据所述待服务科室和当前位置的位置信息确定二者之间的行驶距离;其中,所述当前位置为:其他待服务科室或医疗配送机器人仓库;
18、针对每个所述医疗配送机器人,依据所述行驶距离和所述医疗配送机器人的行驶速度,确定从所述当前位置到所述待服务科室的行驶时长;
19、依据所述行驶时长、所述医疗配送机器人离开医疗配送机器人仓库的时间、离开所述其他待服务科室的时间、以及在单个待服务科室的卸载时间,确定所述医疗配送机器人达到所述待服务科室的时间。
20、可选地,所述预设约束函数包括如下至少之一:
21、用于约束每个待服务科室被一个医疗配送机器人服务一次的第一约束函数;
22、用于约束每个所述医疗配送机器人行驶轨迹连续的第二约束函数;
23、用于约束医疗配送机器人返回任一预设终点位置的第三约束函数,其中,预设终点位置包括:医疗配送机器人仓库、充电站以及维修站;
24、用于约束本次可使用医疗配送机器人数量小于或等于医疗配送机器人仓库中医疗配送机器人总量的第四约束函数;
25、用于约束医疗配送机器人行驶轨迹中避免回环路段的第五约束函数;
26、用于约束每个待服务科室在对应的交货时间内得到服务的第六约束函数;
27、用于约束医疗配送机器人在指定时间内充电的第七约束函数;
28、用于约束医疗配送机器人最终返回车库的第八约束函数;
29、用于约束医疗配送机器人在向指定待服务科室完成服务后前往维修站的的第九约束函数;
30、用于约束医疗配送机器人的剩余装载能力可满足待服务科室配送医疗物资重量的第十约束函数;
31、用于约束所述目标函数中各决策变量的第十一约束函数。
32、可选地,所述医疗配送机器人的剩余装载能力通过如下方式计算得到:
33、依据总缓冲库存、待服务科室的呼叫时间、呼叫时间缓冲库存、每片医疗物资消耗时间、每片医疗物资重量以及医疗配送机器人达到所述待服务科室的时间,确定所述医疗配送机器人在所述待服务科室的物资卸载量;
34、依据所述医疗配送机器人在其他待服务科室的物资载重量和在所述待服务科室的物资卸载量,确定所述医疗配送机器人的剩余装载能力,其中,所述其他待服务科室为所述医疗配送机器人本次待服务的排序位于所述待服务科室前一位的待服务科室。
35、本发明实施例提供了一种用于医院内医疗配送机器人智能调度装置,其中,该装置包括:
36、第一确定模块,用于确定单个周期内待服务科室对应的交货时间和位置信息;
37、第二确定模块,用于确定医疗配送机器人的行驶速度、单位距离行驶成本以及单位时间惩罚成本;
38、行驶成本确定模块,用于针对每个待服务科室,依据各所述待服务科室的位置信息和所述单位距离行驶成本,确定医疗配送机器人服务所述待服务科室对应的行驶成本;
39、时间惩罚成本确定模块,用于依据各所述待服务科室的交货时间和位置信息、医疗配送机器人的行驶速度和单位时间惩罚成本,确定医疗配送机器人服务所述待服务科室时的时间惩罚成本;
40、策略确定模块,用于将医疗配送机器人的行驶成本、时间惩罚成本、医疗配送机器人的使用成本代入预设目标函数与预设约束函数进行联合求解,得到医疗配送机器人调度策略;
41、其中,所述目标函数用于表征本周期内全部所述待服务科室所消耗的医疗配送机器人的行驶成本、时间惩罚成本以及使用成本之和最小;所述调度策略包括:本周期调度的目标医疗配送机器人集合、每个所述目标医疗配送机器人的配送路径。
42、可选地,所述行驶成本确定模块包括:
43、距离确定子模块,用于针对每个待服务科室,依据所述待服务科室和当前位置的位置信息确定二者之间的行驶距离;其中,所述当前位置为:其他待服务科室或医疗配送机器人仓库;
44、第一成本确定子模块,用于依据所述行驶距离和单位距离行驶成本,确定从所述当前位置到所述待服务科室的行驶成本。
45、可选地,所述时间惩罚成本确定模块包括:
46、到达时间确定子模块,用于针对每个待服务科室,依据所述待服务科室的交货时间和位置信息、医疗配送机器人的行驶速度,确定各所述医疗配送机器人达到所述待服务科室的时间;
47、第二成本确定子模块,用于依据所述待服务科室的交货时间、所述医疗配送机器人达到所述待服务科室的时间以及单位时间惩罚成本,确定各所述医疗配送机器人达到所述待服务科室时对应的时间惩罚成本。
48、可选地,所述到达时间确定子模块具体用于:
49、针对每个待服务科室,依据所述待服务科室和当前位置的位置信息确定二者之间的行驶距离;其中,所述当前位置为:其他待服务科室或医疗配送机器人仓库;
50、针对每个所述医疗配送机器人,依据所述行驶距离和所述医疗配送机器人的行驶速度,确定从所述当前位置到所述待服务科室的行驶时长;
51、依据所述行驶时长、所述医疗配送机器人离开医疗配送机器人仓库的时间、离开所述其他服务科室的时间、以及在单个待服务科室的卸载时间,确定所述医疗配送机器人达到所述待服务科室的时间。
52、可选地,所述预设约束函数包括如下至少之一:
53、用于约束每个待服务科室被一个医疗配送机器人服务一次的第一约束函数;
54、用于约束每个所述医疗配送机器人行驶轨迹连续的第二约束函数;
55、用于约束医疗配送机器人返回任一预设终点位置的第三约束函数,其中,预设终点位置包括:医疗配送机器人仓库、充电站以及维修站;
56、用于约束本次可使用医疗配送机器人数量小于或等于医疗配送机器人仓库中医疗配送机器人总量的第四约束函数;
57、用于约束医疗配送机器人行驶轨迹中避免回环路段的第五约束函数;
58、用于约束每个待服务科室在对应的交货时间内得到服务的第六约束函数;
59、用于约束医疗配送机器人在指定时间内充电的第七约束函数;
60、用于约束医疗配送机器人最终返回车库的第八约束函数;
61、用于约束医疗配送机器人在向指定待服务科室完成服务后前往维修站的的第九约束函数;
62、用于约束医疗配送机器人的剩余装载能力可满足待服务科室配送医疗物资重量的第十约束函数;
63、用于约束所述目标函数中各决策变量的第十一约束函数。
64、可选地,所述医疗配送机器人的剩余装载能力通过如下方式计算得到:
65、依据总缓冲库存、待服务科室的呼叫时间、呼叫时间缓冲库存、每片医疗物资消耗时间、每片医疗物资重量以及医疗配送机器人达到所述待服务科室的时间,确定所述医疗配送机器人在所述待服务科室的物资卸载量;
66、依据所述医疗配送机器人在其他待服务科室的物资载重量和在所述待服务科室的物资卸载量,确定所述医疗配送机器人的剩余装载能力,其中,所述其他服务科室为所述医疗配送机器人本次待服务的排序位于所述待服务科室前一位的待服务科室。
67、本发明实施例还提供了一种电子设备,包括处理器,存储器,存储在存储器上并可在所述处理器上运行的程序或指令,该程序或指令被处理器执行所述任意一种用于医院内医疗配送机器人智能调度方法的流程。
68、本技术实施例提供的用于医院内医疗配送机器人智能调度方案,确定单个周期内待服务科室对应的交货时间和位置信息;确定医疗配送机器人的行驶速度、单位距离行驶成本以及单位时间惩罚成本;针对每个待服务科室,依据各待服务科室的位置信息和单位距离行驶成本,确定医疗配送机器人服务待服务科室对应的行驶成本;依据各待服务科室的交货时间和位置信息、医疗配送机器人的行驶速度和单位时间惩罚成本,确定医疗配送机器人服务该待服务科室时的时间惩罚成本;将各医疗配送机器人的行驶成本、时间惩罚成本、各医疗配送机器人的使用成本代入预设目标函数与预设约束函数进行联合求解,得到医疗配送机器人调度策略,所提供的调度策略能够减少由行驶成本、惩罚成本和医疗配送机器人使用成本组成的总成本,可在确保医疗器人完成各调度任务的前提下降低医疗器人的调度成本、提升调度任务的处理效率。
- 还没有人留言评论。精彩留言会获得点赞!