一种载具调度方法、装置、系统、电子设备及存储介质与流程
本技术涉及智能物流,特别是涉及一种载具调度方法、装置、系统、电子设备及存储介质。
背景技术:
1、在以智能运输车实现的自动化物流搬运系统中,货物在装载到载具中后,智能运输车可以搬运该载具在入口区域、存储区域和工作区域等区域之间进行移动,从而实现货物的流转。其中,每个区域内都预先规划了多个储位,用于存放装载有货物的满载具以及未装载货物的空载具。
2、因为满载具和空载具是共用区域中的储位的,所以区域中保留一部分空载具,也就意味着需要占用掉区域中的一部分空储位。当保留的空载具较多时,虽然可以保证满足该区域即时的货物搬运需求,但是同时也会导致空储位变少,无法保证满载具顺利进入该区域,会出现物流阻塞的问题。当保留的空载具较少时,区域中的空储位会变多,此时虽然可以保证满载具顺利进入该区域,但是在该区域产生即时的货物搬运需求时,少量空载具无法满足该货物搬运需求,也会出现物流阻塞的情况。
3、因此,需要提供一种合理的载具调度方法,以保证货物流转的畅通。
技术实现思路
1、本技术实施例的目的在于提供一种载具调度方法、装置、系统、电子设备及存储介质,以避免无场地、无载具支持货物流转的情况,保证货物流转的畅通。具体技术方案如下:
2、第一方面,本技术实施例提供了一种载具调度方法,所述方法包括:
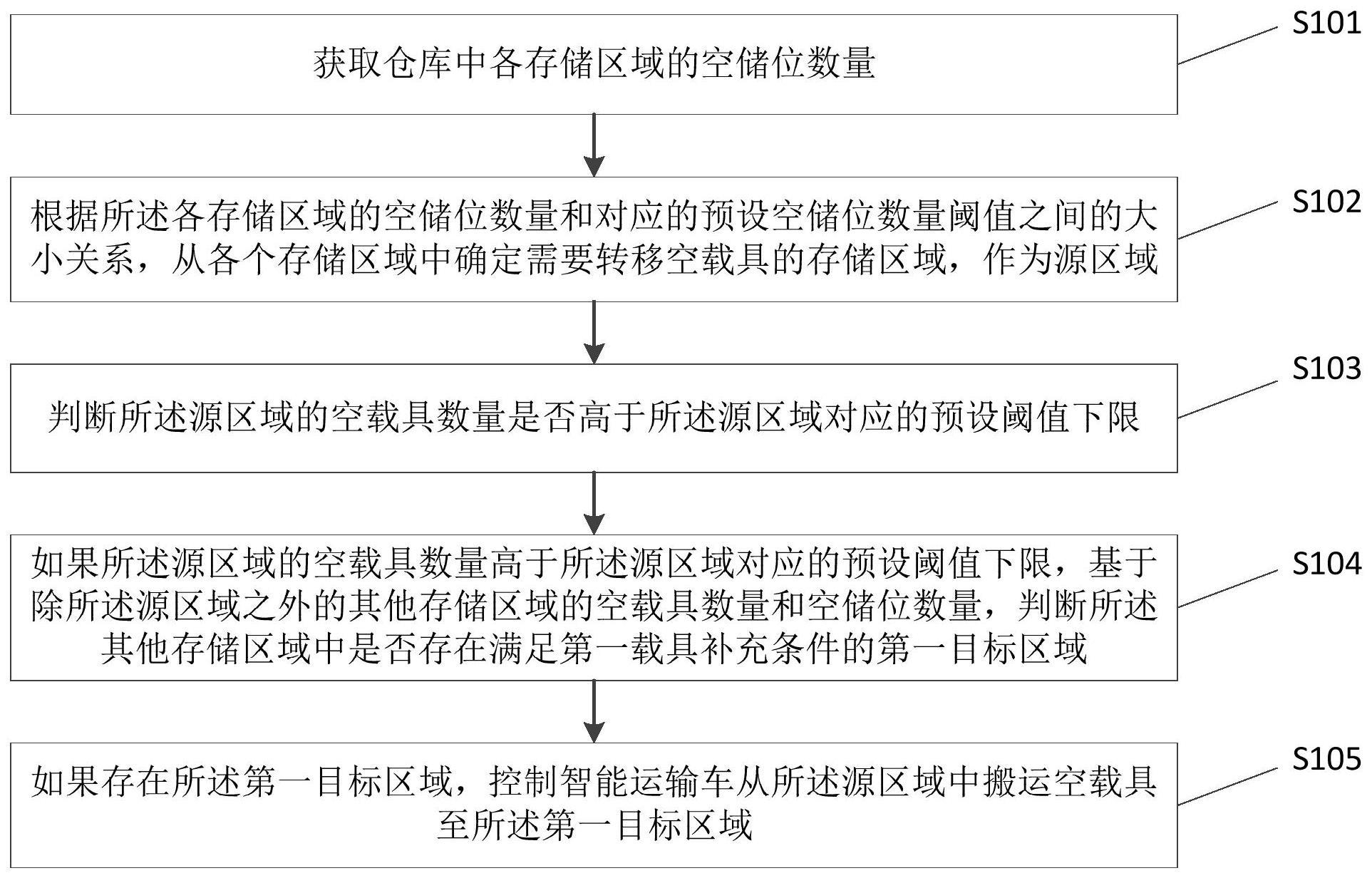
3、获取仓库中各存储区域的空储位数量,其中,所述存储区域包括多个储位,所述储位用于存放载具;
4、根据所述各存储区域的空储位数量和对应的预设空储位数量阈值之间的大小关系,从各个存储区域中确定需要转移空载具的存储区域,作为源区域;
5、判断所述源区域的空载具数量是否高于所述源区域对应的预设阈值下限;
6、如果所述源区域的空载具数量高于所述源区域对应的预设阈值下限,基于除所述源区域之外的其他存储区域的空载具数量和空储位数量,判断所述其他存储区域中是否存在满足第一载具补充条件的第一目标区域;
7、如果存在所述第一目标区域,控制智能运输车从所述源区域中搬运空载具至所述第一目标区域。
8、可选的,所述根据所述各存储区域的空储位数量和对应的预设空储位数量阈值之间的大小关系,从各个存储区域中确定需要转移空载具的存储区域,作为源区域,包括:
9、针对每个存储区域,计算该存储区域的空储位数量和对应的预设空储位数量阈值之间的第一比值;
10、将所述第一比值中的最小值所对应的存储区域,作为第一备选区域;
11、判断所述第一备选区域的空储位数量是否低于所述第一备选区域对应的预设空储位数量阈值;
12、如果所述第一备选区域的空储位数量低于所述第一备选区域对应的预设空储位数量阈值,将所述第一备选区域确定为源区域。
13、可选的,所述基于除所述源区域之外的其他存储区域的空载具数量和空储位数量,判断所述其他存储区域中是否存在满足第一载具补充条件的第一目标区域,包括:
14、判断除所述源区域之外的其他存储区域中,是否存在空载具数量低于对应的预设阈值下限,且空储位数量高于对应的预设空储位数量阈值的第二备选区域;
15、如果存在所述第二备选区域,针对每个第二备选区域,计算该第二备选区域的空储位数量和对应的预设空储位数量阈值之间的第二比值;将所述第二比值中的最大值所对应的第二备选区域,作为第一目标区域;或,针对每个第二备选区域,计算该第二备选区域的空载具数量和对应的预设阈值下限之间的第三比值;将所述第三比值中的最小值所对应的第二备选区域,作为第一目标区域。
16、可选的,所述方法还包括:
17、如果不存在所述第一目标区域,判断入口区域的空储位数量是否高于所述入口区域对应的预设空储位数量阈值,其中,所述入口区域为货物进入仓库的区域;
18、如果入口区域的空储位数量高于所述入口区域对应的预设空储位数量阈值,将所述入口区域确定为用于接收空载具的第二目标区域,并控制智能运输车从所述源区域中搬运空载具至所述第二目标区域;
19、如果入口区域的空储位数量不高于所述入口区域对应的预设空储位数量阈值,基于所述其他存储区域的空储位数量,判断所述其他存储区域中是否存在满足第二载具补充条件的第三目标区域;
20、如果存在所述第三目标区域,控制智能运输车从所述源区域中搬运空载具至所述第三目标区域。
21、可选的,所述基于所述其他存储区域的空储位数量,判断所述其他存储区域中是否存在满足第二载具补充条件的第三目标区域,包括:
22、针对所述其他存储区域中的空储位数量最多的存储区域,判断该存储区域的空储位数量是否高于该存储区域对应的预设空储位数量阈值;
23、如果所述空储位数量最多的存储区域的空储位数量高于该存储区域对应的预设空储位数量阈值,将该空储位数量最多的存储区域,确定为用于接收空载具的第三目标区域。
24、可选的,所述入口区域为多个;
25、所述判断入口区域的空储位数量是否高于所述入口区域对应的预设空储位数量阈值,包括:
26、针对每个入口区域,计算该入口区域的空储位数量和对应的预设空储位数量阈值之间的第四比值;
27、判断所述第四比值中的最大值所对应的入口区域的空储位数量是否高于该入口区域对应的预设空储位数量阈值。
28、可选的,在所述判断所述第四比值中的最大值所对应的入口区域的空储位数量是否高于该入口区域对应的预设空储位数量阈值之前,所述方法还包括:
29、针对每个入口区域,计算该入口区域的空载具数量和对应的预设阈值下限之间的第五比值;
30、当存在小于1的第五比值时,判断所述第五比值中的最小值所对应的入口区域的空储位数量是否高于该入口区域对应的预设空储位数量阈值;
31、当不存在小于1的第五比值时,执行所述判断所述第四比值中的最大值所对应的入口区域的空储位数量是否高于该入口区域对应的预设空储位数量阈值的步骤。
32、可选的,所述方法还包括:
33、如果所述第一备选区域的空储位数量不低于所述第一备选区域对应的预设空储位数量阈值,基于入口区域的空载具数量和空储位数量,判断所述入口区域是否满足第三载具补充条件;
34、如果所述入口区域满足所述第三载具补充条件,针对空载具数量和对应的预设阈值下限的比值最大的存储区域,判断该存储区域的空载具数量是否高于该存储区域对应的预设阈值下限;
35、如果所述空载具数量和对应的预设阈值下限的比值最大的存储区域的空载具数量高于该存储区域对应的预设阈值下限,控制智能运输车从所述空载具数量和对应的预设阈值下限的比值最大的存储区域中搬运空载具至所述入口区域。
36、可选的,所述入口区域为多个;
37、所述判断入口区域是否满足第三载具补充条件,包括:
38、按照预设优先级顺序,遍历多个所述入口区域;
39、每遍历一个入口区域,判断该入口区域的空载具数量是否低于对应的预设阈值下限,且该入口区域的空储位数量是否高于对应的预设空储位数量阈值;
40、如果该入口区域的空载具数量低于对应的预设阈值下限,且空储位数量高于对应的预设空储位数量阈值,确定该入口区域满足第三载具补充条件;
41、如果否,继续遍历下一入口区域,并返回所述每遍历一个入口区域,判断该入口区域的空载具数量是否低于对应的预设阈值下限,且该入口区域的空储位数量是否高于对应的预设空储位数量阈值的步骤。
42、可选的,在所述控制智能运输车从所述空载具数量和对应的预设阈值下限的比值最大的存储区域中搬运空载具至所述入口区域之后,所述方法还包括:
43、判断所述入口区域的空载具数量是否未达到对应的预设阈值上限,且所述入口区域的空储位数量是否高于对应的预设空储位数量阈值;
44、如果所述入口区域的空载具数量未达到对应的预设阈值上限,且所述入口区域的空储位数量高于对应的预设空储位数量阈值,返回所述针对空载具数量和对应的预设阈值下限的比值最大的存储区域,判断该存储区域的空载具数量是否高于该存储区域对应的预设阈值下限的步骤。
45、可选的,在所述控制智能运输车从所述源区域中搬运空载具至所述第一目标区域之后,所述方法还包括:
46、返回所述获取仓库中各存储区域的空储位数量的步骤,直到各个存储区域的空储位数量均不低于该存储区域对应的预设空储位数量阈值,或,返回次数达到预设次数。
47、可选的,所述其他存储区域为存储的载具的类型与所述源区域存储的载具的类型相同的存储区域。
48、第二方面,本技术实施例提供了一种载具调度装置,所述装置包括:
49、空储位数量获取模块,用于获取仓库中各存储区域的空储位数量,其中,所述存储区域包括多个储位,所述储位用于存放载具;
50、源区域确定模块,用于根据所述各存储区域的空储位数量和对应的预设空储位数量阈值之间的大小关系,从各个存储区域中确定需要转移空载具的存储区域,作为源区域;
51、第一判断模块,用于判断所述源区域的空载具数量是否高于所述源区域对应的预设阈值下限;
52、第二判断模块,用于在所述源区域的空载具数量高于所述源区域对应的预设阈值下限时,基于除所述源区域之外的其他存储区域的空载具数量和空储位数量,判断所述其他存储区域中是否存在满足第一载具补充条件的第一目标区域;
53、控制模块,用于在存在所述第一目标区域时,控制智能运输车从所述源区域中搬运空载具至所述第一目标区域。
54、可选的,所述源区域确定模块,包括:
55、第一比值计算单元,用于针对每个存储区域,计算该存储区域的空储位数量和对应的预设空储位数量阈值之间的第一比值;
56、第一备选区域确定单元,用于将所述第一比值中的最小值所对应的存储区域,作为第一备选区域;
57、第一判断单元,用于判断所述第一备选区域的空储位数量是否低于所述第一备选区域对应的预设空储位数量阈值;
58、源区域确定单元,用于在所述第一判断单元的判断结果为是时,将所述第一备选区域确定为源区域。
59、可选的,所述第二判断模块,包括:
60、第二备选区域确定单元,用于判断除所述源区域之外的其他存储区域中,是否存在空载具数量低于对应的预设阈值下限,且空储位数量高于对应的预设空储位数量阈值的第二备选区域;
61、第二比值计算单元,用于在存在所述第二备选区域时,针对每个第二备选区域,计算该第二备选区域的空储位数量和对应的预设空储位数量阈值之间的第二比值;
62、第三比值计算单元,用于在存在所述第二备选区域时,针对每个第二备选区域,计算该第二备选区域的空载具数量和对应的预设阈值下限之间的第三比值;
63、第一目标区域确定单元,用于将所述第二比值中的最大值所对应的第二备选区域,作为第一目标区域,或,将所述第三比值中的最小值所对应的第二备选区域,作为第一目标区域。
64、可选的,所述装置还包括:
65、第三判断模块,用于在不存在所述第一目标区域时,判断入口区域的空储位数量是否高于所述入口区域对应的预设空储位数量阈值,其中,所述入口区域为货物进入仓库的区域;
66、第二目标区域确定模块,用于在所述第三判断模块的判断结果为是时,将所述入口区域确定为用于接收空载具的第二目标区域;
67、第三目标区域确定模块,用于在所述第三判断模块的判断结果为否时,基于所述其他存储区域的空储位数量,判断所述其他存储区域中是否存在满足第二载具补充条件的第三目标区域;
68、所述控制模块,还用于控制智能运输车从所述源区域中搬运空载具至所述第二目标区域,或,控制智能运输车从所述源区域中搬运空载具至所述第三目标区域。
69、可选的,所述第三目标区域确定模块,包括:
70、第二判断单元,用于针对所述其他存储区域中的空储位数量最多的存储区域,判断该存储区域的空储位数量是否高于该存储区域对应的预设空储位数量阈值;
71、第三目标区域确定单元,用于在第二判断单元的判断结果为是时,将该空储位数量最多的存储区域,确定为用于接收空载具的第三目标区域。
72、可选的,所述入口区域为多个;
73、所述第三判断模块,包括:
74、第四比值计算单元,用于针对每个入口区域,计算该入口区域的空储位数量和对应的预设空储位数量阈值之间的第四比值;
75、第五比值计算单元,用于针对每个入口区域,计算该入口区域的空载具数量和对应的预设阈值下限之间的第五比值;
76、第三判断单元,用于判断所述第四比值中的最大值所对应的入口区域的空储位数量是否高于该入口区域对应的预设空储位数量阈值,或,当存在小于1的第五比值时,判断所述第五比值中的最小值所对应的入口区域的空储位数量是否高于该入口区域对应的预设空储位数量阈值;当不存在小于1的第五比值时,判断所述第四比值中的最大值所对应的入口区域的空储位数量是否高于该入口区域对应的预设空储位数量阈值。
77、可选的,所述装置还包括:
78、第四判断模块,用于在所述第一判断单元的判断结果为否时,基于入口区域的空载具数量和空储位数量,判断所述入口区域是否满足第三载具补充条件;
79、第五判断模块,用于在所述第四判断模块判断结果为是时,针对空载具数量和对应的预设阈值下限的比值最大的存储区域,判断该存储区域的空载具数量是否高于该存储区域对应的预设阈值下限;
80、控制模块,用于在所述第五判断模块的判断结果为是时,控制智能运输车从所述空载具数量和对应的预设阈值下限的比值最大的存储区域中搬运空载具至所述入口区域。
81、可选的,所述入口区域为多个;
82、所述第四判断模块,包括:
83、遍历单元,用于按照预设优先级顺序,遍历多个所述入口区域;
84、第四判断单元,用于每遍历一个入口区域,判断该入口区域的空载具数量是否低于对应的预设阈值下限,且该入口区域的空储位数量是否高于对应的预设空储位数量阈值;
85、补充确定单元,用于在所述第四判断单元的判断结果为是时,确定该入口区域满足第三载具补充条件;
86、返回单元,用于在所述第四判断单元的判断结果为否时,继续遍历下一入口区域,并触发所述第四判断单元的执行。
87、可选的,所述装置还包括:
88、第六判断模块,用于在所述控制模块控制智能运输车从所述空载具数量和对应的预设阈值下限的比值最大的存储区域中搬运空载具至所述入口区域后,判断所述入口区域的空载具数量是否未达到对应的预设阈值上限,且所述入口区域的空储位数量是否高于对应的预设空储位数量阈值;
89、第一返回模块,用于在所述第六判断模块的判断结果为是时,触发所述第五判断模块的执行。
90、可选的,所述装置还包括:
91、第二返回模块,用于在所述控制模块控制智能运输车从所述源区域中搬运空载具至所述第一目标区域之后,触发所述空储位数量获取模块的执行,直到各个存储区域的空储位数量均不低于该存储区域对应的预设空储位数量阈值,或,返回次数达到预设次数。
92、可选的,所述其他存储区域为存储的载具的类型与所述源区域存储的载具的类型相同的存储区域。
93、第三方面,本技术实施例提供了一种载具调度系统,所述系统包括:控制设备和智能运输车,其中:
94、所述控制设备,用于获取仓库中各存储区域的空储位数量;根据所述各存储区域的空储位数量和对应的预设空储位数量阈值之间的大小关系,从各个存储区域中确定需要转移空载具的存储区域,作为源区域;判断所述源区域的空载具数量是否高于所述源区域对应的预设阈值下限;如果所述源区域的空载具数量高于所述源区域对应的预设阈值下限,基于除所述源区域之外的其他存储区域的空载具数量和空储位数量,判断所述其他存储区域中是否存在满足第一载具补充条件的第一目标区域;如果存在所述第一目标区域,发送控制指令至所述智能运输车,其中,所述存储区域包括多个储位,所述储位用于存放载具;
95、所述智能运输车,用于在接收到所述控制指令时,从所述源区域中搬运空载具至所述第一目标区域。
96、第四方面,本技术实施例提供了一种电子设备,包括:
97、存储器,用于存放计算机程序;
98、处理器,用于执行存储器上所存放的程序时,实现上述第一方面任一所述的方法。
99、第五方面,本技术实施例提供了一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面任一所述的方法。
100、本技术实施例有益效果:
101、本技术实施例提供的方案中,电子设备可以获取仓库中各存储区域的空储位数量,其中,存储区域包括多个储位,储位用于存放载具;根据各存储区域的空储位数量和对应的预设空储位数量阈值之间的大小关系,从各个存储区域中确定需要转移空载具的存储区域,作为源区域;判断源区域的空载具数量是否高于源区域对应的预设阈值下限;如果源区域的空载具数量高于源区域对应的预设阈值下限,基于除源区域之外的其他存储区域的空载具数量和空储位数量,判断其他存储区域中是否存在满足第一载具补充条件的第一目标区域;如果存在第一目标区域,控制智能运输车从源区域中搬运空载具至第一目标区域。由于电子设备可以根据各个存储区域的空储位和空载具情况,确定需要转移空载具的源区域和需要补充空载具的第一目标区域,进而控制智能运输车从源区域中搬运空载具至第一目标区域,所以既完成了源区域中的空载具的转移,又完成了对于第一目标区域的空载具的补充,使得仓库中的空载具分布均衡。并且电子设备在调度载具时,综合考虑了空储位数量和空载具数量,所以可以保证存储区域同时具有足够的空储位和足够的空载具支持货物流转,避免了无场地、无载具支持货物流转的情况,保证了货物流转的畅通。
102、当然,实施本技术的任一产品或方法并不一定需要同时达到以上所述的所有优点。
- 还没有人留言评论。精彩留言会获得点赞!