复杂边界下可变长度轴向移动弦线系统侧向振动获取方法
本发明属于机械振动测量,具体的为一种复杂边界下可变长度轴向移动弦线系统侧向振动获取方法。
背景技术:
1、轴向移动系统具有阻尼低、刚度小、质量轻、柔韧性好和能耗低等优点,被广泛地应用于现代工程领域中,如航空航天、海洋、电子、土木、机械和汽车等工程等。噪声和振动伴随着这些设备的运转,尤其是横向振动对这些设备的功能和安全造成了很大的影响。
2、传统的研究技术是基于哈密顿原理建立的偏微分运动方程以及基于拉格朗日方程建立的有限单元动力学方程,利用数值计算方法,如伽辽金法、龙格库塔法、纽马克法以及时变状态空间方程等方法求解以上方程,以获得轴向移动绳索设备的横向振动响应。在进行理论分析时,解析解是更为有力的方法,但当前一般的解析解技术仅仅限于一个周期内的计算,如公开号为cn109614745a的中国专利提出的一种获取混合边界条件下轴向移动绳索设备横向振动的方法,该方法提出了一种获取轴向移动绳索一个振动周期t中各阶段的反射波响应方程的方法,但该方法无法在任意长时间进行计算。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种复杂边界下可变长度轴向移动弦线系统侧向振动获取方法,旨在获取轴向移动弦线系统在可变长度和复杂边界条件下的侧向振动。
2、为达到上述目的,本发明提供如下技术方案:
3、一种复杂边界下可变长度轴向移动弦线系统侧向振动获取方法,包括如下步骤:
4、步骤一:根据动力学特性和力学原理,建立可变长度轴向移动弦线系统在质量-阻尼-弹簧边界和dirichlet边界条件下的动力学模型;
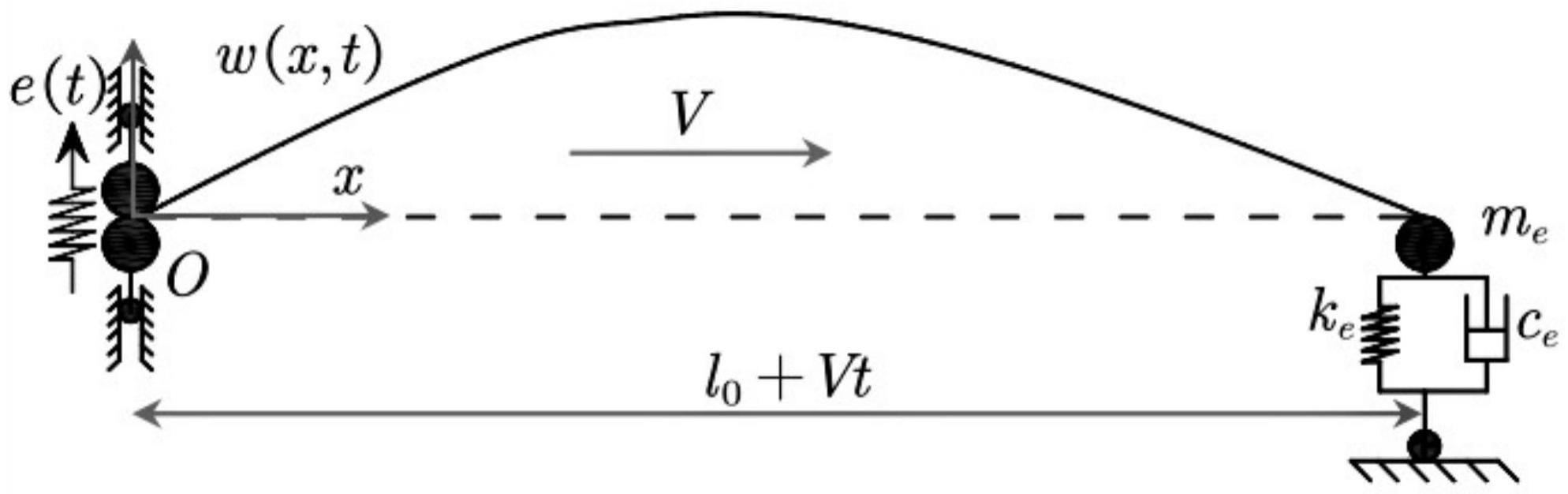
5、可变长度轴向移动弦线系统的弦线的两端中,第一端为激励输入端,第二端为等效集中质量端;以弦线的第一端为原点建立固定坐标系oxy,可变长度轴向移动弦线系统在质量-阻尼-弹簧边界和dirichlet边界条件下的动力学模型为:
6、
7、其中:ρ,t和v分别为弦线的线密度,静态张力和恒定移动速度;x表示弦线上的点在x方向上与原点距离;w(x,t)表示弦线上与原点距离为x的点的横向位移;l0为弦线的初始长度;l(t)为弦线的实时长度;t表示时间;
8、边界条件为:
9、
10、其中,me,ce和ke分别为等效集中质量,等效阻尼和等效刚度;e(t)表示第一端输入的位移激励;表示横向位移对时间的一阶导数;表示横向位移对时间的二阶导数;w′表示横向位移对空间的一阶导数;w″表示横向位移对空间的二阶导数;表示横向位移对时间、空间的二阶混合导数;
11、步骤二:将计算域转换为特征线域,在特征线域的端点建立弹性波反射方程,所述弹性波反射方程包括在dirichlet边界条件下的波反射方程和在质量-阻尼-弹簧的复杂边界条件下的波反射方程;
12、步骤三:采用duhamel积分进行求解,得到波反射方程解析解;
13、步骤四:根据小步长内波形线性假设,采用快速递推的方法,得到特征线域内波反射方程半解析解;
14、步骤五:根据左右行波的叠加方法,将特征线域的计算结果叠加得到原始时空域,得到可变长度轴向移动弦线系统的振动结果。
15、进一步,所述步骤二中,将计算域转换为特征线域,将动力学模型的解w表示为两个行波叠加的形式:
16、w=f(x-vrt)+g(x+vlt)
17、vr=c十v
18、vl=c-v
19、其中:vr和vl表示固定坐标系中弦线朝第二端移动的第二行波的速度和朝第一端移动的第一行波的速度;表示弦线在静止条件下的波速;f(x-vrt)为速度为vr的第二行波;g(x+vlt)为速度为vl的第一行波;
20、确定弦线振动的初始横向位移和速度条件:
21、
22、其中:函数φ(x)为固定坐标系中弦线上不同位置的初始横向位移;函数ψ(x)为固定坐标系中弦线上不同位置的初始速度;
23、得到第一行波和第二行波在初始时刻的表达式:
24、
25、其中,c为积分常数;
26、在x-t域中使用第一横波和第二横波表示弦线中任意时间任意点的横向位移:
27、w(x,t)=f(ξ)+g(η)
28、
29、其中:x表示在固定坐标系中点的位置;t表示任意时间;ξ表示引入的第二行波参数,也即特征线域内的第二坐标;η表示引入的第一行波参数,也即特征线域内的第一坐标;
30、引入第一行波参数ξ和第二行波参数η,在ξ-η域中表示行波,将求解动力学方程问题转化为求解边界上的第一行波和第二行波问题,其中:
31、第一行波参数ξ为:
32、ξ=-vrt
33、第二行波参数η为:
34、η=l0+ct
35、其中:c表示弦线在静止条件下的波速。
36、进一步,所述步骤二中,在dirichlet边界条件下的波反射方程为:
37、f(-vrt)+g(vlt)=e(t)
38、其中:f(-vrt)表示第一端点的第二行波,g(vlt)表示第一端点的第一行波;
39、第一行波与第二反射行波之间的关系为:
40、
41、其中:f(ξ)表示第二行波;f′(ξ)表示第二行波对第二行波参数的一阶导数;f″(ξ)表示第二行波对第二行波参数的二阶导数;表示第一行波;表示第一行波对第一行波参数的一阶导数之后代入表示第一行波对第一行波参数的二阶导数之后代入为第一端点的位移激励在特征线域内的表示;y′(ξ)表示第一端点的位移激励在特征线域内对第二行波参数的第一阶导数;y″(ξ)表示第一端点的位移激励在特征线域内对第二行波参数的第二阶导数。
42、进一步,所述步骤二中,在质量-阻尼-弹簧的复杂边界条件下的波反射方程为:
43、ag″+bg′+cg=r
44、
45、其中,a表示复杂边界出反射方程的二阶微分项系数;b表示复杂边界出反射方程的一阶微分项系数;c表示复杂边界出反射方程的零阶微分项系数;r表示复杂边界出反射方程的非齐次项;f表示第二端点边界处的第二行波;f′表示第二端点边界处的第二行波对第二行波参数的一阶导数;f″表示第二端点边界处的第二行波对第二行波参数的二阶导数;g表示第二端点边界处的第一行波;g′表示第二端点边界处的第一行波对第一行波参数的一阶导数;g″表示第二端点边界处的第一行波对第一行波参数的二阶导数;
46、f,g和r的宗量为:
47、
48、第一行波和第二行波的宗量在第二边界的关系为:
49、ξ=2l0-η
50、进一步,所述步骤三中,将第一行波和第二行波的宗量在第二边界的关系代入到在质量-阻尼-弹簧的复杂边界条件下的波反射方程,得到:
51、
52、其中,为r(ξ)经过ξ=2l0-η宗量替换之后的非齐次项,可以得到特征方程:
53、得到特征方程:
54、aλ2+bλ+c=0
55、得到特征方程的特征根:
56、
57、根据特征根的四种情况,分别求解得到单位脉冲响应函数和式的全解:
58、第一种情况:a≠0;b2-4ac>0,特征方程具有两个不相等的实特征根,得到:
59、
60、
61、其中,c1和c2均为参数;
62、采用单位脉冲激励即和l0=0,得到单位脉冲响应函数和式的全解:
63、
64、
65、其中:h(η)表示反射方程的单位脉冲响应函数;h′(η)表示反射方程的单位脉冲响应函数对第一行波参数的一阶导数;
66、第二种情况:a≠0;b2-4ac=0,特征方程具有两个相等的实特征根,得到:
67、
68、
69、采用单位脉冲激励即和l0=0,得到单位脉冲响应函数和式的全解:
70、
71、
72、第三种情况:a≠0;b2-4ac<0,特征方程有一对复共轭根,即
73、
74、其中abs()为求绝对值的函数,是虚数单位。α,β分别是特征值的实部和虚部。
75、得到:
76、
77、
78、采用单位脉冲激励即和l0=0,得到单位脉冲响应函数和式的全解:
79、
80、
81、第四中情况:a=0;me=0,特征方程的特征根为:
82、
83、得到:
84、
85、c1=g(l0)
86、采用单位脉冲激励即和l0=0,得到单位脉冲响应函数和式的全解:
87、
88、
89、根据第一至第三种情况,将点ηn带入可以得到g″(ηn);使用duhamel积分推导得到第四种情况中的g′(ηn)和g″(ηn);其中,ηn表示任意的第一行波参数。
90、进一步,所述步骤四中,
91、假设与波形相关的项是线性的:
92、
93、
94、其中:δη表示离散的第一行波参数的步长;k(ηn-1)表示在外部非齐次项在一个第一行波参数步长内的斜率;
95、duhamel积分展开,得到:
96、
97、
98、
99、其中,h1(δη)表示单位脉冲响应函数在一个第一行波参数步长内的积分;h′1(δη)表示单位脉冲响应函数对第一行波参数的一阶导函数在一个离散的第一行波参数步长内的积分;h2(δη)表示单位脉冲响应函数乘以第一行波参数的函数在一个第一行波参数步长内的积分;h′2(δη)表示单位脉冲响应函数对第一行波参数的一阶导函数乘以第一行波参数的函数在一个第一行波参数步长内的积分。
100、进一步,振动结果为:
101、w(x1,t1)=f(ξ)+g(η)。
102、其中:x1表示任一点的位置坐标;t1表示任一时刻。
103、本发明的有益效果在于:
104、本发明的复杂边界下可变长度轴向移动弦线系统侧向振动获取方法,针对轴向运动弦线系统复杂的边界条件在可变长度情况下的波解问题,采用特征线方法和duhamel积分来解决;首先根据系统动力学特性和力学原理建立系统的数学模型,并将计算域转换为特征线域,在特征线域的端点建立弹性波反射方程,所述弹性波反射方程包括在dirichlet边界条件下的波反射方程和在质量-阻尼-弹簧的复杂边界条件下的波反射方程;其次,采用duhamel积分进行求解,得到波反射方程解析解,根据小步长内波形线性假设,采用快速递推的方法,得到特征线域内波反射方程半解析解;最后,根据第一行波和第二行波的叠加方法,将特征线域的计算结果叠加得到原始时空域的轴向移动弦线的振动结果;如此,本发明的复杂边界下可变长度轴向移动弦线系统侧向振动获取方法,能够获取轴向移动弦线系统在可变长度和复杂边界条件下的侧向振动。
- 还没有人留言评论。精彩留言会获得点赞!