一种基于无人机视觉识别病害精准施药的方法及系统
本发明属于农业植保,更具体地说,特别涉及一种基于无人机视觉识别病害精准施药的方法及系统。
背景技术:
1、我国经济高质量发展和居民消费水平持续提高,居民人均干鲜瓜果类消费量位列全国居民主要食品消费量前十,果品逐渐成为国民消费中非常重要的部分。提高水果产量和质量成为现实需要,能够产生较大的经济效益。然而,要提升果品质量,需要准确评估果园病害情况,并采用合适的农药喷施剂量进行果园管理。以果树病害情况指导计算农药喷洒剂量,从而指导植保喷雾机对果树进行变量施药,可以达到精准施药的目的。合理的果树病害探测方法在提高果园农药利用率、降低环境污染、减少施药成本等方面都具有重要意义。
2、实际果园种植场景中,冠层密度越大,植株抗病性就越强,病虫害发生的概率和程度也越低,使得病害检测更加困难。基于深度学习图像处理的病害识别方法在单叶病害识别上有了较多研究,并且识别精度较高,这种局部病害识别的方法需要进一步探索以指导实际施药过程。实际的果园病害情况判定仍然依靠专家经验人工巡园进行,存在耗时长、主观性强的缺点,但能够对果园整体病害进行把控。
3、结合地面植保机械,探索识别病害精准施药的方案来精准、快速地确定果树病害情况,能够极大满足果树精准施药的需求。
技术实现思路
1、针对现有技术的不足,本发明提供了一种基于无人机视觉识别病害精准施药的方法及系统,通过采用机器视觉技术为变量施药提供更为精准的树冠特征和果树病害信息,以解决现有技术中依靠专家巡园进行果园病害判定的人为局限性的技术问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:一种基于无人机视觉识别病害精准施药的方法,包括以下步骤:
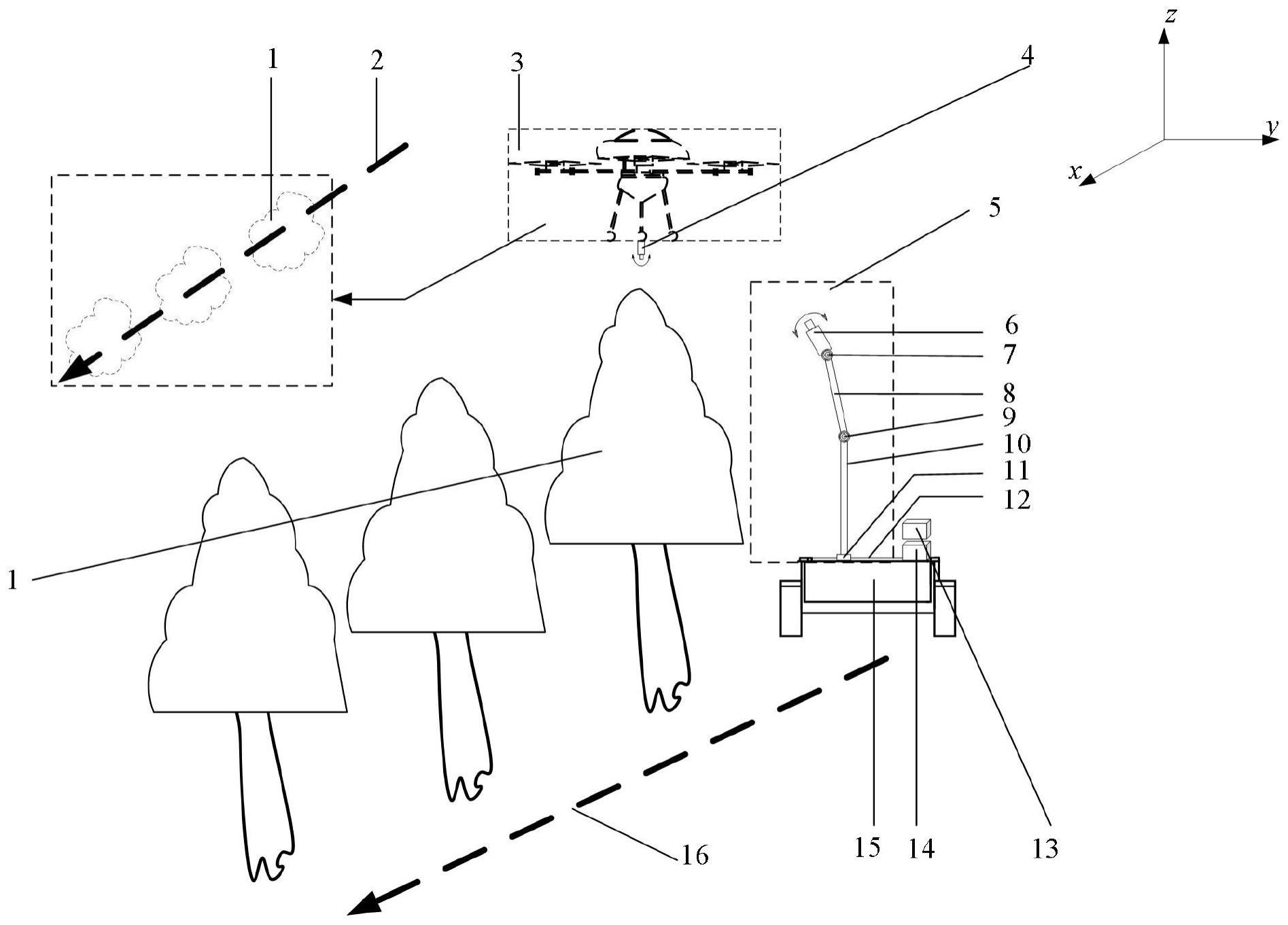
3、s1:空中无人机沿果树排列方向的空中路径逐行飞行拍摄所述果树1冠顶视图,地面无人植保机沿所述果树排列方向的地面路径在果树行间行进拍摄所述果树冠层的侧面视图;
4、s2:通过步骤s1拍摄的所述果树冠顶视图和侧面视图确定所述果树的冠层轮廓、冠幅面积s、冠幅面积等级gs、冠层疏密度k、冠层疏密度等级kn的冠层特征参数;
5、s3:根据步骤s2中采集的所述果树冠层特征参数确定所述果树病害观测方案,并识别出病害情况;
6、s4:根据步骤s3中观测的所述果树病害情况对所述果树精准施药。
7、作为本发明的优选技术方案,步骤s2包括以下步骤:
8、s21:所述果树冠层的侧面视图通过阈值分割法提取出冠层轮廓;
9、s22:将树冠轮廓内叶片部分像素点数与非叶片部分像素点分离计算出冠层疏密度k;
10、s23:根据步骤s22中的冠层疏密度k划分出冠层疏密度等级kn;
11、s24:从所述果树冠层的顶部视图中分割出树冠部分得到冠幅面积s;
12、s25:根据步骤s24中的冠幅面积划分出冠幅面积等级gs。
13、作为本发明的优选技术方案,步骤s3包括以下步骤:
14、s31:根据冠层疏密度等级kn和冠幅面积等级gs建立树冠病害采集规则,得到病害采集点数量,并确定所述地面无人植保机中冠层检测机构的移动路径;
15、s32:调节地面可见光相机位姿,对待检测树冠进行检测;
16、s33:通过部署好的病害识别算法识别每个采集点对应的病害类型。
17、作为本发明的优选技术方案,步骤s22中,通过计算确定冠层孔隙率n,再通过k=100%-n计算确定冠层疏密度k。
18、作为本发明的优选技术方案,步骤s23中,冠层疏密度等级kn通过计算确定,nn表示稀疏冠层,no表示正常冠层,np表示稠密冠层,n表示冠层孔隙率。
19、作为本发明的优选技术方案,步骤s25中,通过计算确定冠幅面积等级gs,,sn表示小冠幅,so表示中冠幅,sp表示大冠幅,s是通过图像处理技术计算得到的冠幅面积。
20、作为本发明的优选技术方案,步骤s31中,病害采集规则对应的病害采集点数量num通过下表确定:
21、 nn no np sn 4×3+(0) 4×3+(4) 4×3+(3+4+3) so 8×3+(0) 4×3+(8) 4×3+(6+8+6) sp 4×6+(0) 4×3+(8×2) 4×3+(4×2+8×2+4×2)
22、其中nn表示稀疏冠层,no表示正常冠层,np表示稠密冠层,sn表示小冠幅,so表示中冠幅,sp表示大冠幅,无括号的数据为树冠外层表面采集点数,括号内数据为树冠内层采集点数。
23、为了实现目的,本发明还提供一种基于无人机视觉识别病害精准施药的系统,包括地面无人植保机和空中无人机,所述空中无人机上搭载有空中可见光相机,所述地面无人植保机上搭载有冠层检测机构、所述单片机、控制器。作为本发明的优选技术方案,所述冠层检测机构包括机构底盘,所述机构底盘上设置有旋转关节,所述机构底盘上设置有通过旋转关节连接的第一连杆,所述第一连杆上端设置有第一连杆关节,所述第一连杆通过所述第一连杆关节连接有第二连杆,所述第二连杆上端设置有第二连杆关节,所述第二连杆通过所述第二连杆关节连接有地面可见光相机。
24、作为本发明的优选技术方案,所述冠层检测机构位于所述地面无人植保机上方的一侧,所述单片机与所述控制器位于所述地面无人植保机上方远离所述冠层检测机构的一侧。
25、本发明提供了一种基于无人机视觉识别病害精准施药的方法及系统,具备以下有益效果:
26、1、本发明结合机器视觉技术探测果园病害,相较于专家人工巡园确定病害情况,节约了人工成本,同时还提高了识别的准确性,从而保证精确计算施药量。
27、2、本发明通过地面无人植保机冠层检测机构对果树上冠层、中冠层、下冠层和冠层内部病害情况进行多点探测,实现了果树冠层病害检测全覆盖。
28、3、本发明通过地面无人植保机与空中无人机一体化检测果树冠层特征,从而自适应调整病害观测点。
29、4、冠层检测机构通过第二连杆关节、第二连杆、第一连杆关节、第一连杆、旋转关节、机构底盘的配合,能够实现果树冠层特征、果树病害特征的多任务测量,满足不同植保任务所需。
- 还没有人留言评论。精彩留言会获得点赞!