稳定性高的视频采集装置的制作方法
本发明涉及工业机器人,具体为稳定性高的视频采集装置。
背景技术:
1、机器视觉系统就是利用机器代替人眼来作各种测量和判断。它是计算机学科的一个重要分支,它综合了光学、机械、电子、计算机软硬件等方面的技术,涉及到计算机、图像处理、模式识别、人工智能、信号处理、光机电一体化等多个领域。图像处理和模式识别等技术的快速发展,也大大地推动了机器视觉的发展。
2、大部分工业机器人可以自主完成程序所设定的任务,在这些工业机器人上,一般都安装有视觉系统,用于定位目标所在位置,但是在机器人在运行过程中通常会产生振动,虽然视觉系统所依附的硬件配套设施存在减振组件,但是,在减振之后,还会存在缓冲振动的情况产生,从而减少视觉的稳定性,视觉稳定性差带来的后果就是工业机器人在执行任务时,需要更多的时间去调整执行机构的坐标,从而准确锁定目标,这样会增加机器人的作业时间,因此如何提升工业机器人的视觉稳定性成为亟需解决的问题。
技术实现思路
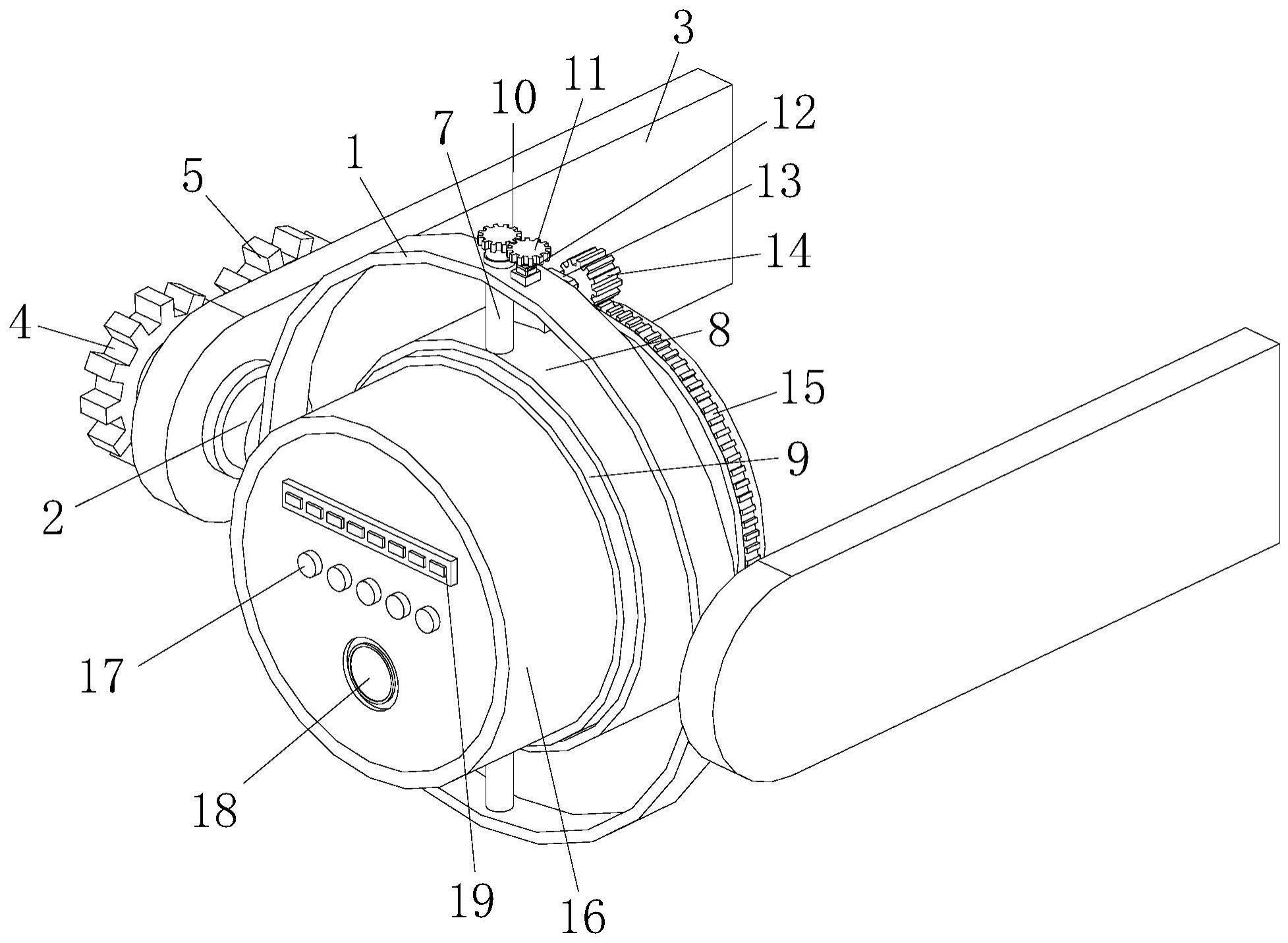
1、本发明的目的在于提供稳定性高的视频采集装置,以解决上述背景技术中提出的问题。为实现上述目的,本发明提供如下技术方案:稳定性高的视频采集装置,包括第一调节环,所述第一调节环的两侧对称固定安装有两个相同的第一转轴,两个所述第一转轴的表面均转动配合安装有固定架,其中一个所述第一转轴贯穿固定架并安装有可以带动第一调节环转动的第一驱动机构,所述第一调节环的内壁对称转动安装有第二转轴,两个所述第二转轴之间固定安装有第二调节环,其中一个所述第二转轴贯穿第一调节环并安装有可以带动第二调节环转动的第二驱动机构,所述第二调节环的内壁通过轴承转动套接有定位筒,所述第二调节环与所述定位筒上安装有可以带动定位筒转动的旋转调节机构。
2、优选的,所述定位筒的圆形端面处内嵌安装有摄像头模块,所述定位筒的圆形端面处安装有传感器组件和光源模块。
3、具体地,传感器组件由多种类型的传感器组成,包括红外线传感器、距离传感器、位移传感器和接近传感器。
4、优选的,所述定位筒的内部安装有单片机控制模块,所述摄像头模块在置于定位筒内部的表面安装有陀螺仪模块,所述陀螺仪模块电性连接单片机控制模块,所述单片机控制模块还电性连接光源模块、传感器组件和摄像头模块。
5、优选的,所述第一驱动机构包括第一从动齿轮,所述第一从动齿轮固定安装在第一转轴的一侧,所述第一从动齿轮与第一主动齿轮啮合,所述第一主动齿轮固定安装在第一步进电机的动力输出轴,所述第一步进电机固定安装在固定架的一侧,所述第一步进电机电性连接单片机控制模块。
6、优选的,所述第二驱动机构包括第二从动齿轮,所述第二从动齿轮固定安装在贯穿第二转轴的末端,所述第二从动齿轮啮合连接第二主动齿轮,所述第二主动齿轮固定安装在第二步进电机的动力输出轴,所述第二步进电机固定安装在第一调节环的顶部表面。
7、优选的,旋转调节机构包括调节电机,所述调节电机固定安装在第二调节环的表面,所述调节电机的动力输出端固定安装有调节齿轮,所述调节齿轮啮合连接齿圈,所述齿圈套接在定位筒的表面,所述调节齿轮电性连接单片机控制模块。
8、优选的,所述第二转轴与所述第一转轴的轴心线相互垂直设置。
9、优选的,所述第一调节环和所述第二调节环同心设置。
10、与现有技术相比,本发明的有益效果:
11、本发明通过陀螺仪模块,配合单片机控制模块、第一驱动机构、第二驱动机构和旋转调节机构可以有效地调节摄像头模块的方向,当安装有该视觉定位装置的工业机器人在移动时,如果发生颠簸,通过第一驱动机构、第二驱动机构和旋转调节机构控制摄像头旋转,可以有效地抵消颠簸时造成的视觉晃动,从而增加工业机器人的视觉稳定性。
12、本发明通过在采用十字交叉的方法来控制摄像头模块的位置,并且摄像头模块与定位筒的圆形端面圆心不重合,不仅可以调节摄像头模块前后左右角度,同时,也可以通过定位筒的自传调节其上下位置,相较于现有的技术,采用定位筒自转的方法调节其上下位置,更加节省空间。
技术特征:
1.稳定性高的视频采集装置,包括第一调节环(1),其特征在于:所述第一调节环(1)的两侧对称固定安装有两个相同的第一转轴(2),两个所述第一转轴(2)的表面均转动配合安装有固定架(3),其中一个所述第一转轴(2)贯穿固定架(3)并安装有可以带动第一调节环(1)转动的第一驱动机构,所述第一调节环(1)的内壁对称转动安装有第二转轴(7),两个所述第二转轴(7)之间固定安装有第二调节环(8),其中一个所述第二转轴(7)贯穿第一调节环(1)并安装有可以带动第二调节环(8)转动的第二驱动机构,所述第二调节环(8)的内壁通过轴承(9)转动套接有定位筒(16),所述第二调节环(8)与所述定位筒(16)上安装有可以带动定位筒(16)转动的旋转调节机构。
2.根据权利要求1所述的稳定性高的视频采集装置,其特征在于:所述第一调节环(1)和所述第二调节环(8)同心设置。
3.根据权利要求1所述的稳定性高的视频采集装置,其特征在于:所述第二转轴(7)与所述第一转轴(2)的轴心线相互垂直设置。
4.根据权利要求1所述的稳定性高的视频采集装置,其特征在于:旋转调节机构包括调节电机(13),所述调节电机(13)固定安装在第二调节环(8)的表面,所述调节电机(13)的动力输出端固定安装有调节齿轮(14),所述调节齿轮(14)啮合连接齿圈(15),所述齿圈(15)套接在定位筒(16)的表面,所述调节齿轮(14)电性连接单片机控制模块(20)。
5.根据权利要求1所述的稳定性高的视频采集装置,其特征在于:所述第二驱动机构包括第二从动齿轮(10),所述第二从动齿轮(10)固定安装在贯穿第二转轴(7)的末端,所述第二从动齿轮(10)啮合连接第二主动齿轮(11),所述第二主动齿轮(11)固定安装在第二步进电机(12)的动力输出轴,所述第二步进电机(12)固定安装在第一调节环(1)的顶部表面。
6.根据权利要求1所述的稳定性高的视频采集装置,其特征在于:所述第一驱动机构包括第一从动齿轮(4),所述第一从动齿轮(4)固定安装在第一转轴(2)的一侧,所述第一从动齿轮(4)与第一主动齿轮(5)啮合,所述第一主动齿轮(5)固定安装在第一步进电机(6)的动力输出轴,所述第一步进电机(6)固定安装在固定架(3)的一侧,所述第一步进电机(6)电性连接单片机控制模块(20)。
7.根据权利要求1所述的稳定性高的视频采集装置,其特征在于:所述定位筒(16)的圆形端面处内嵌安装有摄像头模块(18),所述定位筒(16)的圆形端面处安装有传感器组件(17)和光源模块(19),所述定位筒(16)的内部安装有单片机控制模块(20),所述摄像头模块(18)在置于定位筒(16)内部的表面安装有陀螺仪模块(21),所述陀螺仪模块(21)电性连接单片机控制模块(20),所述单片机控制模块(20)还电性连接光源模块(19)、传感器组件(17)和摄像头模块(18)。
技术总结
本发明涉及工业机器人技术领域,具体为稳定性高的视频采集装置,包括第一调节环,所述第一调节环的两侧对称固定安装有两个相同的第一转轴,两个所述第一转轴的表面均转动配合安装有固定架,其中一个所述第一转轴贯穿固定架并安装有可以带动第一调节环转动的第一驱动机构。本发明通过陀螺仪模块,配合单片机控制模块、第一驱动机构、第二驱动机构和旋转调节机构可以有效地调节摄像头模块的方向,当安装有该视觉定位装置的工业机器人在移动时,如果发生颠簸,通过第一驱动机构、第二驱动机构和旋转调节机构控制摄像头旋转,可以有效地抵消颠簸时造成的视觉晃动,从而增加工业机器人的视觉稳定性。
技术研发人员:邹元华
受保护的技术使用者:深圳市万德昌科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!