基于机器人运行轨迹模拟的路径规划方法与流程
本发明涉及机器人轨迹模拟,具体地说,涉及基于机器人运行轨迹模拟的路径规划方法。
背景技术:
1、三维激光扫描系统主要由三维激光扫描仪、计算机、电源供应系统、支架以及系统配套软件构成,三维激光扫描仪作为三维激光扫描系统的主要组成部分,它通过高速激光扫描测量的方法,大面积高分辨率地快速获取被测对象表面的三维坐标数据,可以快速、大量的采集空间点位信息,为快速建立物体的三维影像模型提供了一种全新的技术手段,在进行三维激光扫描过程中需要通过机器人调控三维激光扫描仪器进行位置变化,以适应不同样本的扫描工作。
2、在对样品进行三维激光扫描过程中,需要通过机器人手臂夹持三维激光仪器进行位置调整,从而完成对样品模型扫描工作,而机器人手臂由多个相互铰接的臂柱组成,相邻臂柱之间通过节点转动连接,以用于调整三维激光仪器角度调整,适应不同样品的扫描工作,但由于各个样品结构不同,其扫描面积也会有所差异,如果不同提前对各个节点进行角度范围划分,就会导致扫描过程中需要重复调节不同节点的角度,促使扫描效率大大降低。
3、为了应对上述问题,现亟需基于机器人运行轨迹模拟的路径规划方法。
技术实现思路
1、本发明的目的在于提供基于机器人运行轨迹模拟的路径规划方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,提供了基于机器人运行轨迹模拟的路径规划方法,包括如下步骤:
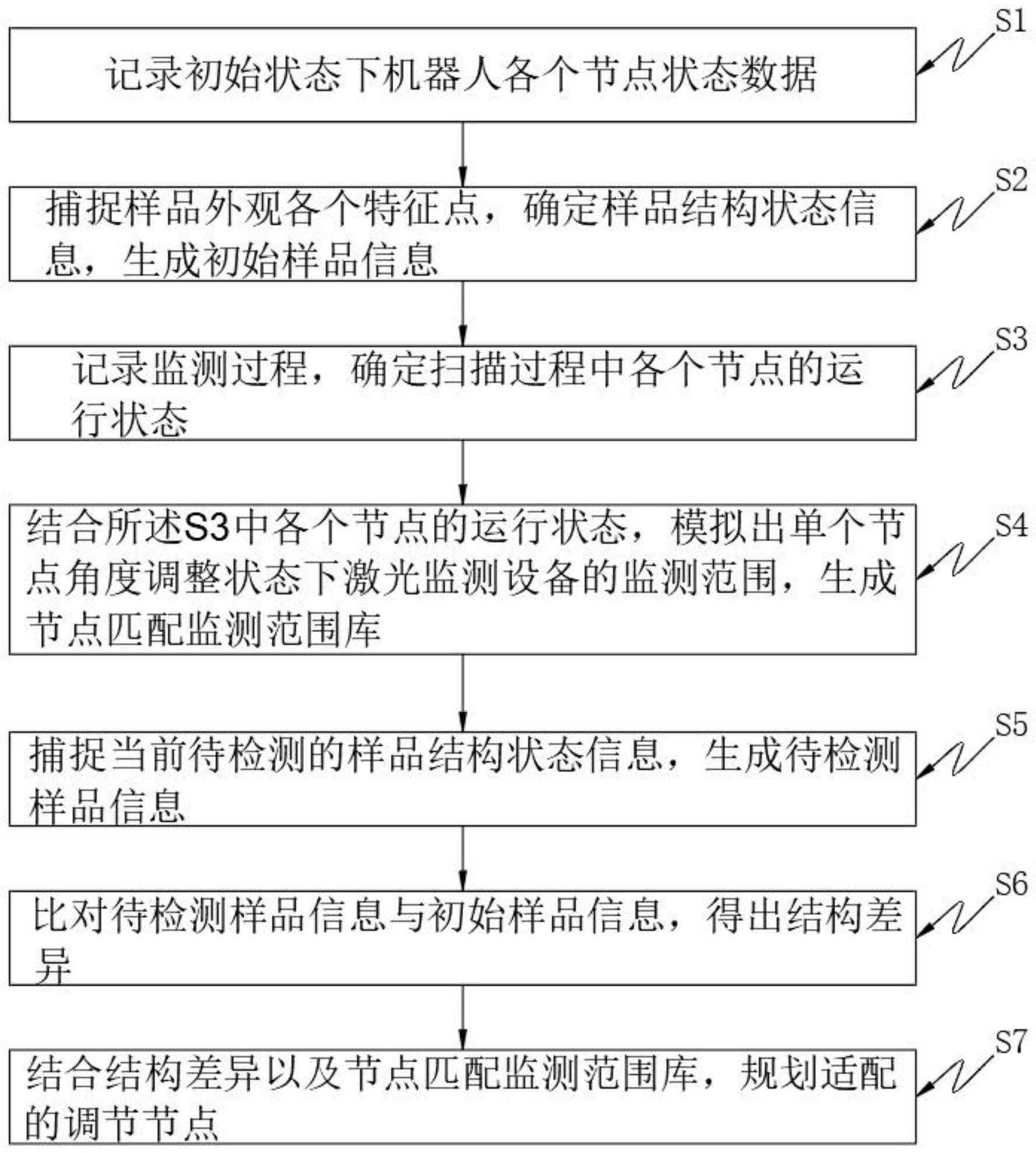
3、s1、记录初始状态下机器人各个节点状态数据;
4、s2、捕捉样品外观各个特征点,确定样品结构状态信息,生成初始样品信息;
5、s3、记录监测过程,确定扫描过程中各个节点的运行状态;
6、s4、结合所述s3中各个节点的运行状态,模拟出单个节点角度调整状态下激光监测设备的监测范围,生成节点匹配监测范围库;
7、s5、捕捉当前待检测的样品结构状态信息,生成待检测样品信息;
8、s6、比对待检测样品信息与初始样品信息,得出结构差异;
9、s7、结合结构差异以及节点匹配监测范围库,规划适配的调节节点。
10、作为本技术方案的进一步改进,所述s1中记录初始状态下机器人各个节点状态数据的记录方法包括如下步骤:
11、s1.1、确定各个臂柱连接顺序,按照连接顺序对各个臂柱进行标记处理;
12、s1.2、确定连接两相邻臂柱的标记,对其连接的节点进行识别;
13、s1.3、记录两相邻臂柱之间的偏移角度,作为连接的节点的识别标记。
14、作为本技术方案的进一步改进,所述s2中捕捉样品外观各个特征点的捕捉方法包括如下步骤:
15、s2.1、确定各项特征,并记录各项特征最小值与最大值;
16、s2.2、结合各项特征最小值与最大值,确定特征变化范围。
17、作为本技术方案的进一步改进,所述s2.1中的各项特征包括样品宽度、样品长度以及样品厚度。
18、作为本技术方案的进一步改进,所述s4中生成节点匹配监测范围库的方法包括如下步骤:
19、s4.1、确定当前调节节点,并维持其余节点角度不变;
20、s4.2、调整调节节点角度,实时观察扫描仪器显示动态;
21、s4.3、结合扫描仪器显示动态,确定各个调节节点的角度调节阈值,模拟出各个调节节点的匹配监测范围,生成节点匹配监测范围库。
22、作为本技术方案的进一步改进,所述s6中比对待检测样品信息与初始样品信息的比对方法包括如下步骤:
23、s6.1、捕捉待检测样品与初始样品各项特征阈值;
24、s6.2、比对待检测样品与初始样品各项特征阈值之差,得出阈值差值;
25、s6.3、分析各项特征阈值差值,规划比对模拟图。
26、作为本技术方案的进一步改进,所述s7中规划适配的调节节点的方法包括如下步骤:
27、s7.1、确定节点匹配监测范围满足结构差异的各个节点,标记为预备调节节点;
28、s7.2、确定各个预备调节节点完成当前待检测样品的扫描工作所需要调节的幅度;
29、s7.3、选取调节的幅度最小的预备调节节点作为最终的调节节点。
30、作为本技术方案的进一步改进,所述s7中规划适配的调节节点的方法采用幅度比对算法,其算法公式如下:
31、|a1-a2|=aamplitude;
32、
33、其中aamplitude为预备调节节点需要调节的幅度,a1为初始角度,a2为结束角度,f(aprepare)为幅度匹配函数,aprepare为当前输入的预备调节节点需要调节的幅度,当当前输入的预备调节节点需要调节的幅度aprepare低于预备调节节点需要调节的幅度aamplitude,幅度匹配函数f(aprepare)输出为aamplitude,当当前输入的预备调节节点需要调节的幅度aprepare不低于预备调节节点需要调节的幅度aamplitude,幅度匹配函数f(aprepare)输出为aprepare。
34、与现有技术相比,本发明的有益效果:
35、该基于机器人运行轨迹模拟的路径规划方法中,通过捕捉当前待检测的样品结构状态信息,生成待检测样品信息,比对待检测样品与初始样品状态信息,得出结构差异,不仅能够为不同结构的样品提前规划适配的调节节点,通过对调节节点进行角度调节控制,促使三维监测仪器完成对样品的扫描工作,提高扫描效率,减少扫描操作步骤,同时结合不同节点的调整幅度以及匹配监测范围,合理规划调整幅度最低的预备节点作为最终的调节节点,进一步减少扫描过程中的三维仪器的位置变化幅度。
技术特征:
1.基于机器人运行轨迹模拟的路径规划方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于机器人运行轨迹模拟的路径规划方法,其特征在于:所述s1中记录初始状态下机器人各个节点状态数据的记录方法包括如下步骤:
3.根据权利要求1所述的基于机器人运行轨迹模拟的路径规划方法,其特征在于:所述s2中捕捉样品外观各个特征点的捕捉方法包括如下步骤:
4.根据权利要求3所述的基于机器人运行轨迹模拟的路径规划方法,其特征在于:所述s2.1中的各项特征包括样品宽度、样品长度以及样品厚度。
5.根据权利要求1所述的基于机器人运行轨迹模拟的路径规划方法,其特征在于:所述s4中生成节点匹配监测范围库的方法包括如下步骤:
6.根据权利要求1所述的基于机器人运行轨迹模拟的路径规划方法,其特征在于:所述s6中比对待检测样品信息与初始样品信息的比对方法包括如下步骤:
7.根据权利要求1所述的基于机器人运行轨迹模拟的路径规划方法,其特征在于:所述s7中规划适配的调节节点的方法包括如下步骤:
8.根据权利要求7所述的基于机器人运行轨迹模拟的路径规划方法,其特征在于:所述s7中规划适配的调节节点的方法采用幅度比对算法,其算法公式如下:
技术总结
本发明涉及机器人轨迹模拟技术领域,具体地说,涉及基于机器人运行轨迹模拟的路径规划方法。其包括比对待检测样品信息与初始样品信息,得出结构差异;结合结构差异以及节点匹配监测范围库,规划适配的调节节点。本发明通过捕捉当前待检测的样品结构状态信息,生成待检测样品信息,比对待检测样品与初始样品状态信息,得出结构差异,不仅能够为不同结构的样品提前规划适配的调节节点,通过对调节节点进行角度调节控制,促使三维监测仪器完成对样品的扫描工作,提高扫描效率,减少扫描操作步骤,同时结合不同节点的调整幅度以及匹配监测范围,合理规划调整幅度最低的预备节点作为最终的调节节点,进一步减少扫描过程中的三维仪器的位置变化幅度。
技术研发人员:宋紫微
受保护的技术使用者:上海模高信息科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!